
Fターム[5J070BB21]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡の特徴 (317) | アンテナの制御 (30)
Fターム[5J070BB21]の下位に属するFターム
加速度を考慮したもの (6)
Fターム[5J070BB21]に分類される特許
1 - 20 / 24
レーダ装置
【課題】測角精度を向上できるレーダ装置を提供する。
【解決手段】複数の素子を有し、複数の素子が順番に複数の第1素子12aと第2素子11aと第3素子11a´と複数の第4素子12a´とに分割されたアンテナ10と、観測角度範囲全体を第2素子と第3素子とで覆うビームを形成し、所定角度を中心とする所定範囲を複数の第1素子と複数の第4素子とで覆うビームを形成し、複数の素子全体で所定角度を中心とする所定範囲内の任意の方向にビームを形成するビーム成形部34と、ビーム成形部で形成されたビームに基づきモノパルス測角を行う測角部37とを備える。
(もっと読む)
パッシブ型飛しょう体飛しょう制御装置および制御方法

【課題】TDOAとFDOAを観測し、目標の位置をパッシブに測位するパッシブ型飛しょう体において、測位精度の向上を図る。
【解決手段】既知の送信源から照射され目標に当たって散乱した散乱波と、既知の送信源から直接到来する直接波との両方を受信することでTDOAおよびFDOAを観測し、自らは電波を放射することなく目標を測位して自らの飛しょう経路を目標へと向かうように制御する飛しょう制御部(14)を備えたパッシブ型飛しょう体飛しょう制御装置であって、自機、送信源、目標の幾何学的配置からGDOPを演算するとともに、ISO−TDOAとISO−FDOAの直交度を推定し、現在の飛しょう体による測位誤差の定量的な判断指標を生成するGDOP演算部(18)をさらに備える。
(もっと読む)
気象現象の自動追尾方法及び自動追尾システム
【課題】積乱雲を含む雷雲等の気象現象をRHI観測により確実且つ自動的に追尾する。
【解決手段】自動追尾システム10において、解析用PC22は、気象ドップラレーダ23が観測した気象現象のエコー強度データに基づくエコー頂高度及び鉛直積算雨水量のプロダクトを用いて、注目したいエコーを追尾対象として自動的に決定し、決定した注目エコーに応じた気象現象に対してRHI観測を行うときの方位角を自動的に算出する。
(もっと読む)
アンテナ回転からアンテナ回転にかけてのレーダブリップの多次元時間的運動フィルタリングの方法
【課題】アンテナ回転からアンテナ回転にかけてのレーダブリップの多次元時間的運動フィルタリングの方法を提供する。
【解決手段】主に、検出システムの処理サブシステムから供給されるブリップを、トラック生成のために解析する前に、格付けすることを可能にする方法からなり、各トラックは、検出された移動目標の軌道を表すと仮定される。解析継続時間が考慮され、解析継続時間の間に検出されたすべてのブリップが考慮される。これらのブリップは、サブセットに分割され、各サブセットは、初期位置および速度ベクトルで定義された同一解析チャネルにおいて解析継続時間の間に検出されたブリップに対応する。このように形成されたサブセットは、グループ分けされ、同一グループが、複数の属性の結合されたアサーションが妥当と判断されたブリップを含むサブセットを結合する。
(もっと読む)
レーダ装置
【課題】レーダ装置で真上を通過しない目標の推定高度を算出する。
【解決手段】開示されるレーダ装置は、電波ビーム照射と反射波受信を行う空中線101と、空中線の方向を制御する駆動制御器102と、送信信号を発生しディジタル受信信号を出力する送受信器103と、受信信号の相関処理を行うパルスドップラ処理器104と、閾値と比較して目標信号を検出する目標信号検出器105と、電波発射時刻と目標信号検出時刻から目標の距離を計測する距離計測器106と、ビーム送信角度から目標の方位角を計測する方位角計測器107と、パルスドップラ処理結果から目標のドップラ周波数を計測するドップラ計測器108と、ドップラ周波数から目標の視線速度を計測する視線速度算出器109と、目標の距離,方位角,視線速度の計測値を遅延させる遅延器110と、計測結果と所定時間前の距離,方位角,視線速度値から目標の推定高度を算定する推定高度算出器111とを具える。
(もっと読む)
レーダ装置
【課題】 レーダ部における個々の周波数帯域や観測する角度を制御して、任意の周波数帯域を選択可能なレーダ部を使用した場合においても、目標の推定姿勢及び各レーダ部の使用可能帯域から各レーダ部の空間周波数領域上の観測領域を算出し、空間周波数領域での所望の信号領域を観測する新規なレーダ装置を提供すること。
【解決手段】 リソース管理部から出力される各レーダ部の観測可能な方位・時間・送信周波数・周波数帯域から目標姿勢推定処理部が推定した目標が観測された時刻以降の所定の時刻毎に前記目標の姿勢と前記各レーダ部とのアスペクト角をそれぞれ算出し、観測条件算出部に入力された観測条件を満たす空間周波数領域上の信号領域である要求領域に対し、目標の姿勢となすアスペクト角が一致するレーダ部の観測領域の割り当てを決定し、この割り当てに基づいて複数のレーダ部に目標を観測させる観測計画算出部とを備えたことを特徴とする。
(もっと読む)
レーダ装置
【課題】メインビームを妨害する妨害波が存在する条件下でも、モノパルス測角による目標測角を可能としつつ、演算量を軽減してコストアップを回避したレーダ装置を得る。
【解決手段】ビーム信号を送信して目標からの反射信号を受信する送受信機と、目標の到来方向を測角するモノパルス測角手段と、受信信号に含まれるメインビームを妨害する妨害波またはメインビームに干渉する干渉波を除去するための信号処理部10Aとを備え、信号処理部10Aは、メインビームを保護するメインローブプロテクション手段44と、受信信号から妨害波を除去するサイドローブ妨害抑圧手段40とを備えている。サイドローブ妨害抑圧手段40は、メインローブプロテクション手段44と協働して、メインローブ成分の過剰抑圧を防ぐためのブロッキングフィルタ47を含む。
(もっと読む)
追尾照準装置
【課題】画像処理に要する時間が多大になることによって発生する照準方向のずれ量を除去して高精度に目標物を追尾できる追尾照準装置。
【解決手段】照準軸が目標物に向くように照準方向を合わせて光を照射する照準器1と、照準器から光が照射された目標物からの反射光を撮像面に結像させることにより該目標物を撮像する撮像器2と、撮像器によって撮像された画像に基づき撮像器および照準器の指向方向を算出する制御器5と、制御器によって算出された指向方向に照準器および撮像器を一体として駆動して位置決めを行う位置決め機構4とを備えた追尾照準装置において、制御器は、指向方向を算出する間に目標物の相対位置が変化することによる照準方向のずれ量を、現在の目標物の位置および直前の目標物の位置に基づき補正量として算出し、該算出した補正量に基づき照準器の照準方向を補正する照準制御部13を備える。
(もっと読む)
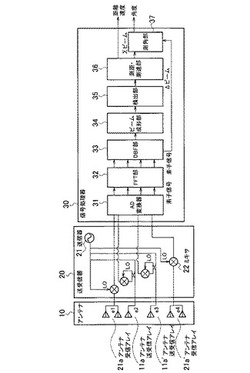
通信装置
【課題】アンテナにより移動体からの電波を追尾する通信装置で、複数のアンテナを切り換えて使用する場合に、追尾の精度を向上させる。
【解決手段】切換手段5が移動体からの電波を受信する複数の系統のアンテナ1、2のうちの1つの系統のアンテナを使用するように切り換え、処理実行手段41、43、44、45、47が受信信号に基づく差信号及び和信号に対してレベル又は位相に関する処理を実行し、角度誤差検出手段51〜53が処理後の差信号及び和信号に基づいてアンテナの角度誤差を検出し、角度調整手段66、3が検出結果に基づいてアンテナの角度を調整し、制御態様記憶手段66が処理の制御態様を各系統毎に対応させて記憶し、処理制御手段66が系統に対応した制御態様に基づいて処理を制御する。
(もっと読む)
3次元高度探知鳥類レーダー用装置および方法
高度探知3次元鳥類レーダーは、アンテナの指向仰角を変更する手段を備える方位角スキャンレーダーを備えている。仰角の変更は、多重ビームを備えたアンテナを用いるか、仰角方向走査手段を用いるか、異なる仰角を指向する2つのレーダーを用いることにより行える。異なる仰角で放射されたビームで探知された鳥などのターゲットからの受信反射波の解析により、ターゲットの高度が特定される。 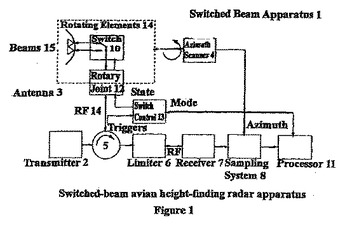 (もっと読む)
(もっと読む)
ビーム走査装置及びビーム走査方法
【課題】簡易な構成で装置規模を拡大することなく、指向性利得のばらつきを低減して探知性能を向上することができるビーム走査装置を提供する。
【解決手段】一様でない指向性利得を有するビームの制御を行うビーム走査装置であって、複数の所定のビーム走査角の中から一つを順次選択するとともに、選択したビーム走査角に応じた第1ビーム走査角信号を生成するビーム走査角選択器11bと、複数の所定のビーム走査角に基づきビーム指向方向を変動させる微小変動量を算出する微小変動発生器14と、ビーム走査角選択器11bにより生成された第1ビーム走査角信号に応じたビーム走査角に対して微小変動発生器14により算出された微小変動量を加算して得られたビーム走査角に応じた第2ビーム走査角信号を生成する微小変動付加器13と、微小変動付加器13により生成された第2ビーム走査角信号に基づきアンテナのビーム指向方向を指示するアンテナ制御信号を生成する走査角制御部6とを備える。
(もっと読む)
アンテナビームの方向を制御するための方法およびシステム
【解決手段】
実施例において、アンテナビームの方向を制御するシステムは、位置識別器、方位センサ、および、アンテナビーム・コントローラを含む。位置識別器は、送信アンテナの位置を示すアンテナの位置を計測する。送信アンテナはアンテナビームを発生させる。方位センサは、送信するアンテナの方位を示す送信アンテナの方位を測定する。アンテナビーム・コントローラは:目標の受信アンテナを記述した目標データにアクセスし(目標データは、送信ンテナに対応する受信アンテナの位置を含む)、送信アンテナの位置、送信アンテナの方位および目標データからの偏差、の値を計算し、かつ偏差の値を下げるためにアンテナビームの方向を調整する。 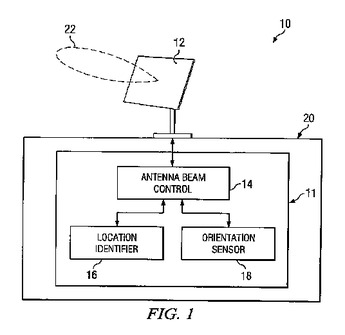 (もっと読む)
(もっと読む)
ビーム走査装置及びビーム走査方法
【課題】簡易な構成で装置規模を拡大することなく、指向性利得のばらつきを低減して探知性能を向上することができるビーム走査装置を提供する。
【解決手段】一様でない指向性利得を有するビームの制御を行うビーム走査装置であって、複数の所定のビーム走査角の中から一つを順次選択するとともに、選択したビーム走査角に応じた第1ビーム走査角信号を生成するビーム走査角選択器11bと、ノイズを発生させるノイズ発生器14と、複数の所定のビーム走査角に基づくノイズ付加範囲を設定するとともに、ノイズ発生器14により発生したノイズに対してノイズ付加範囲に合わせて平行移動又はスケーリングの少なくとも1つを施して得られた乱数を、第1ビーム走査角信号に応じたビーム走査角に対して加算して得られたビーム走査角に応じた第2ビーム走査角信号を生成するノイズ付加器13と、ノイズ付加器13により生成された第2ビーム走査角信号に基づきアンテナのビーム指向方向を指示するアンテナ制御信号を生成する走査角制御部6とを備える。
(もっと読む)
電子走査レーダのビーム制御装置
【課題】複数のアンテナを装備し、同時に複数のアンテナ面で捜索および多目標追尾を行う電子走査レーダにおいて、アンテナ面間の電波干渉を回避するために設定する送信ディレイ時間により、ビーム切換タイミングで発生する無駄時間を極小化すること。
【解決手段】同一目標に対するビーム照射時間を、電子走査アンテナ毎に決定された送信パルス幅、パルス繰り返し周波数(PRI)、送信パルス幅の送信パルスを受信するための受信時間、同一目標を追尾するために必要な所要ヒット数および、これらを元に算出された、電子走査アンテナ間で電波干渉を回避可能なPRI、送信ディレイ時間、ビーム切換タイミングを揃えるための加算時間に基づいて決定する。
(もっと読む)
標定レーダ装置
【課題】 機動性を損なうことなく全方位を監視し位置標定を行なうことの可能な標定レーダ装置を得る。
【解決手段】 標定レーダ装置の空中線部11を、互いに異なる仰角にペンシルビームを有する2つのアンテナ111及び112で構成するとともに、これら2つのアンテナを、方位方向の指向方位が互いに反対となるように配置する。そして、この空中線部11を駆動部12により方位方向に高速回転駆動することによって、異なる2つの仰角の全周方向に目標を捕捉するためのビーム幕を形成する。
(もっと読む)
飛しょう体の誘導装置
【課題】 飛しょう体の誘導装置において、目標に向けて電波を照射し捜索を開始する際に、内部の計算において海面および地面の反射電力(クラッタ電力)を一定として計算しているため、海面および地面の状況によってはクラッタ電力が少なく目標を探知する余裕が十分ある場合においても、捜索を開始せず目標の捜索を開始する距離が必要以上に短くなり、また、海面および地面の反射電力が大きい場合は目標捜索開始時に海面または地面に誤追尾してしまうという課題があった。
【解決手段】 誘導装置にクラッタ信号測定部を設け、実際に運用する環境下でのクラッタ電力を観測することにより、クラッタ電力計算部および捜索開始距離計算部で海面又は地面の状況に応じた捜索開始距離を算出することが可能とした。
(もっと読む)
電波輻射制御装置
【課題】 逆探知される危険性があるため電波輻射禁止領域内でも、作戦遂行のため必要最小限の電波輻射については継続して行う。
【解決手段】 目標情報をリスト登録する目標情報データベースと、目標情報データベースから目標情報リストを取得する目標情報取得部と、目標情報取得部から送出される目標情報リストの目標種別から、自システムへの目標脅威度を判定し脅威度が所定基準以上の場合に目標情報リストを出力する脅威度判定部と、目標情報リストの観測時刻、目標速度から目標予測位置を算出する目標位置予測部と、電波輻射禁止範囲情報を電波輻射禁止範囲リストとして格納される電波輻射禁止範囲データベースと、電波輻射禁止範囲データベースから電波輻射禁止範囲リストを取得し、目標位置予測部から取得する目標予測目標位置と比較し、予測目標位置が電波輻射禁止範囲内の場合にこの禁止範囲を修正可能な電波輻射範囲制御部とを備えた。
(もっと読む)
生産工場内における物品位置検出システム
【課題】 生産工場内に散在する中間製品等が保管されている場所を迅速に検索することができる生産工場内における物品位置検出システムを提供すること。
【解決手段】 物品を搭載した各搬送体Cには、搭載物を表示したリストアップシート5をそれぞれ配備し、かつ、このリストアップシート5には、搭載物のリストデータをメモリするとともに、このリストデータを電波により発信可能なタグ1を装着する一方、
室内の所定位置には、通信装置2を固定し、装置座標Pを付与する一方、回転角センサ23がなす基準軸との位相を回転水平角度φとし、かつ、当該通信装置2と床面との直線距離を基準距離dとして、これら装置座標P、回転水平角度φおよび基準距離dに基づいて検索物品Aの位置座標Qを演算手段3により算出するとともに、
この位置座標Qに該当する位置を、検索物品Aの存在位置として表示手段4にマップ表示可能にするという技術的手段を採用した。
(もっと読む)
レーダ装置
【課題】 クラッタマップ部を小型化し、クラッタによる誤警報を抑圧するレーダ装置を提供する。
【解決手段】 仰角情報及び送受信方向情報に基づき、低仰角走査時には、受信機の出力信号とメモリ203に蓄えられた信号との間で平均化処理を実施して結果をメモリ203に蓄え、中高仰角走査時には、低仰角走査時に処理されてメモリ203に蓄えられた方向j−1,j,j+1の信号に対して、ウエイト発生器204で発生した重み付け係数を乗算器201C〜201Eで乗算し、その結果得られた信号の総和を総和器205で計算する。
(もっと読む)
追尾レーダ装置
【課題】初探知目標の数が増大しても、捜索性能の劣化を防止でき、また、追尾移行時間が長くなることを防止できる追尾レーダ装置を提供する。
【解決手段】指定方向の空間に送信された送信波の反射波を受信する受信機4と、受信機からの受信信号に基づき目標を検出する目標検出部5と、目標検出部で検出された目標を表す目標検出情報に基づいて、目標を追尾するための追尾情報および初めて検出された目標である初探知目標を表す初探知情報を生成して出力する追尾制御部6と、追尾制御部から出力される追尾情報および初探知情報に基づいてビーム制御を行うレーダ制御部7とを備え、レーダ制御部は、追尾制御部から出力される初探知情報によって表される初探知目標が真目標であるかどうかを確認する検定処理として、検定専用の検定ビームによる検定処理または検定と捜索とが兼用される捜索ビームによる検定処理の何れかを選択する検定方式選択器12を備える。
(もっと読む)
1 - 20 / 24
[ Back to top ]