
Fターム[5J070BF08]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 監視方向又は範囲 (317) | 後方 (59)
Fターム[5J070BF08]に分類される特許
21 - 40 / 59
車両用障害物検出装置
【課題】障害物と非障害物の判別を容易に行うことが可能な車両用障害物検出装置を提供することを目的とする。
【解決手段】自車両から異なる領域へ向けて検出用波動を照射し、検出用波動に対して応答する反射波をとらえることにより自車両周辺の波動反射点位置情報を検出する検出装置を備え、前記検出装置により検出された波動反射点位置情報に基づき自車両周辺の物体が識別された際に、識別された該物体が障害物であるか否かを判定する障害物判定手段を有する車両用障害物検出装置であって、前記検出装置は、自車両から所定角度で俯角方向に前記検出用波動を照射し、前記障害物判定手段は、前記波動反射点位置情報を基に求められる自車両から前記物体までの距離と前記所定角度の角度値とから算出される前記物体の高さに応じて、当該物体が障害物であるか否かを判定することを特徴とする。
(もっと読む)
アンテナ装置、監視装置、アンテナ装置の製造方法、プログラムおよび記録媒体

【課題】従来のアンテナ装置で複数の異なる検知領域にある対象物を検知するためには、放射・受信パターンの異なるアンテナを複数用意して用途に応じて切替えたり、1種類のアンテナ装置を複数配置して合成したり、アレー構造のアンテナの位相を変化させたりしなければならず、サイズが大きくなり、また処理時間や制御が複雑となりコストが高くなるという課題があった。
【解決手段】複数個の平面アンテナ素子15が同一平面内に一列に配列されて構成されたアレーアンテナ素子11、12が2個、その同一平面内で2列に線対称で配置されて構成されたアレーアンテナ10を備える。それらの2列のアレーアンテナ素子11、12に供給する電力を異ならせることにより、目標とする電波の放射または受信パターンが実現される。
(もっと読む)
物体検出装置
【課題】本発明は、車両が置かれている環境下で検出すべき物体を適切に検出することができる、物体検出装置の提供を目的とする。
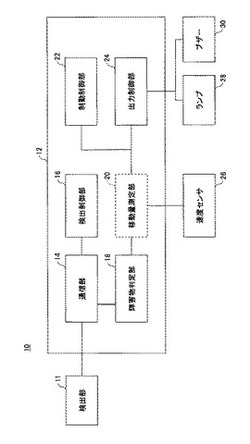
【解決手段】自車両周辺の物体を検出する物体検出装置であって、自車両の動作情報を検知する動作情報検知手段(車載ECU40,車載センサ50)と、自車両の存在地点についての環境情報を検知する環境情報検知手段(ナビゲーション装置30)と、前記動作情報検知手段によって検知された動作情報と前記環境情報検知手段によって検知された環境情報との取得結果に基づいて、前記物体の検出対象を変更する検出対象変更手段(物体検出ECU10)とを備えることを特徴とする、物体検出装置。
(もっと読む)
測定装置および方法
【課題】より少ない演算量で対象物に関係する情報を演算する。
【解決手段】2周波CWレーダ1は、自車の後方あるいは側方にある対象物を認識し(S11)、認識された対象物群を、自車に接近する対象物と、自車から離反する対象物とに判別し(S12)、接近離反の判別結果に基づいて、認識された対象物群の中から、自車に接近すると判別された対象物のみを抽出し(S13)、抽出された対象物との距離Lまたは相対速度vの少なくとも一方を算出し(S14)、測定結果sを出力する(S15)ことで、より少ない演算量で対象物に関係する情報を演算できる。本発明は、対象物を測定する測定装置に適用できる。
(もっと読む)
レーダ装置、物体検出方法、及び車両
【課題】車載レーダ装置を用いて車両の制御を行う場合、データ処理を早く行うため物体検出範囲を適切に制御する必要がある。従来はビーム出射強度を調整していたが、ビームの強度は距離に応じて徐々に減衰するため、物体の検出範囲を適切に設定することは困難であった。また、広角近距離用と狭角遠距離用のレーダ装置を使い分ける方法では、2つのレーダ装置を設置しなければならないという問題があった。装置を複雑化せずに検出範囲を適切に設定できる方法を提供する。
【解決手段】物体に向けてビームを出射する手段と、前記物体からの反射波を受信する手段と、車両の走行状況に応じて物体検出範囲を設定する手段と、前記受信信号と前記物体検出範囲の情報とに基づいて物体を検出する手段とを有するレーダ装置により、容易に検出範囲を制限できるので処理負荷が軽減され、データ処理速度を改善できる。
(もっと読む)
レーダ装置、及び、相対距離検出方法
【課題】FM−CWレーダ装置による至近距離での相対距離検出精度を向上させる。
【解決手段】レーダ波を送信信号として送信し、物標により反射された前記送信信号を受信信号として受信するレーダ装置において、前記送信信号の周波数が上昇と下降とを交互に繰返すように第1の周波数変調を行い、前記第1の周波数変調が行われたときの第1の送信信号と第1の受信信号との周波数差に基づいて前記物標との第1の相対距離を検出する第1の相対距離検出処理を行う相対距離検出手段は、至近距離では、前記送信信号の周波数を切り替える第2の周波数変調を行い、送受信信号により生成される定在波の波数をカウントすることにより、そのカウント値と、前記第2の周波数変調による切り替え前の周波数と切り替え後の周波数の周波数差とに基づき、前記物標との第2の相対距離を検出するので、精度良く相対距離を検出できる。
(もっと読む)
車両用レーダ装置
【課題】ドアミラー内蔵型レーダセンサの検知精度を向上させた車両用レーダ装置を提供すること。
【解決手段】車両に搭載され、自車両周囲の物体を検知する車両用レーダ装置が、自車両車体の少なくとも一部が検知範囲内に入るように自車両に取り付けられたレーダセンサを有し、レーダセンサにより検知された自車両車体の少なくとも一部が延在する位置を基準位置に設定し、レーダセンサにより自車両周辺物体が検知されたとき、該物体の存在方向を上記基準位置からのずれ角度として検出する。
(もっと読む)
レーダ装置、及びその信号処理方法
【課題】窓関数に起因して周波数差信号のサンプリングデータに含まれる低周波成分を効果的に除去する。
【解決手段】送信信号と受信信号との周波数差に対応する周波数差信号の周波数に基づき物標の距離を求めるレーダ装置において、周波数差信号を所定のサンプリング区間でサンプリングして第1のサンプリングデータを生成するサンプリングデータ生成手段と、第1のサンプリングデータを処理して周波数差信号の周波数検出用データを求める周波数検出用データ算出手段とを有する。そして、周波数検出用データ算出手段によれば、第1のサンプリングデータに対し、サンプリング区間の中央付近に端部より大きい重み付けをする窓関数処理をして求められる第2のサンプリングデータから、当該第2のサンプリングデータの平均に前記窓関数処理をした除去成分が除去されるので、低周波成分を効果的に抑圧できる。
(もっと読む)
表示制御装置、方法およびプログラム
【課題】ドライバーが周囲に存在する物体の状況を認知しやすい表示制御装置を提供する。
【解決手段】車両周囲を撮像する撮像部と、音波、電波、またはレーザを照射し反射波を受信することにより、あるいは、上記撮像部からの撮像画像を処理することにより、周囲の障害物の有無、あるいは、距離や方向を検知する物体検知センサと、物体検知センサの制御値を設定し検知領域を所定の条件に応じて変化させる検知領域判断部と、検知領域判断部の制御値に基づき決定される物体検知センサの検知領域を車両周囲を撮像した撮像画像に重畳して表示させ、運転者に検知領域の情報を提供する表示制御部とを備える構成とする。
(もっと読む)
車両用レーダシステム
【課題】受信系統のみならず送信系統の故障の有無も検出することができる車両用レーダシステムを提供すること。
【解決手段】車両2に複数のレーダ3、4が設置され、複数のレーダ3、4のうち一つのレーダが受信した他のミリ波レーダの漏れ電波の受信レベル、周波数に基づいてレーダ動作の異常判断を行う。これにより、レーダの受信系統の異常を検出できるほか、他のレーダの送信系統の異常を検出することもできる。また、レーダの動作異常を検出するに際し、異常検出用に信号を生成する必要がなく、レーダの基本機能構成を利用して動作異常検出が行える。
(もっと読む)
車両用周辺監視装置
【課題】車両周辺の障害物をより適切に監視することが可能な車両用周辺監視装置を提供すること。
【解決手段】自車両前方に延在する所定前方領域内の障害物を監視する前方監視手段と、所定前方領域に比して自車両の側方側に延在する所定前側方領域内の障害物を監視する前側方監視手段と、自車両の走行環境を検知する走行環境検知手段と、を備え、走行環境検知手段により、高速道路を含む所定道路を自車両が走行中であることが検知された際に、前側方監視手段による監視を抑制する車両用周辺監視装置であって、走行環境検知手段により、所定道路のうち合流部を含む所定領域を自車両が走行中であることが検知された場合には、前側方監視手段による監視の抑制程度を緩和することを特徴とする。
(もっと読む)
周辺監視装置
【課題】死角領域を短時間で脱して運転者が直接視認できる領域に移動する他車についての報知を抑制する「周辺監視装置」を提供する。
【解決手段】自動二輪車200が自車後方にいるときの相対速度Vfが、自動二輪車200が、ブラインドスポット101を所定の時間以下で自車100の前方に駆け抜けてしまうことを示している場合には(a)、自動二輪車200がブラインドスポット101内に位置している期間中であっても(b)、他ブラインドスポッ101ト内に他車が存在することの警告は表示しない。他の場合には、自動二輪車200がブラインドスポット101内に位置している期間中、ブラインドスポット101内に他車が存在することの警告を表示する。
(もっと読む)
物体検知装置
【課題】
自動車の周囲の物体をより精度良く検知する
【解決手段】
第1のセンサ101のカバレッジ201−Sにある物体の所定の特徴量を求めて記憶するとともに、物体が第1のセンサのカバレッジ201−Sから第2のセンサのカバレッジ201−Mに移動したときに、記憶装置に記憶された当該物体に関する特徴量と、第2センサ102で認識した結果を処理する処理部で処理された認識結果を分析することにより求めた物体の所定の特徴量とに基づいて、物体との相対距離を求める。
(もっと読む)
周辺監視システム
【課題】より速やかに他車の追尾を開始することのできる「周辺監視システム」を提供する。
【解決手段】レーダ装置1の計測データに基づいて、未追尾の他車の検出と、検出した他車の存在の複数回の確認の処理とを経て、存在を確認した他車の追尾を開始する物標追尾部4を設ける。そして、物標追尾部4において、レーダ装置1の計測データから未追尾の他車の発生が検出されなかった場合でも、他車認識部3がカメラ2で撮影した画像に対する画像認識によって、物標追尾部4において未追尾の他車が識別された場合には、レーダ装置1の計測データに基づいて、当該他車の存在を複数回確認する処理を開始する。
(もっと読む)
車載用レーダ装置
【課題】本発明は、他車のレーダ装置による認識され易さ(被認識性或いは視認性)を向上させ、上記のような状況においても、他車のレーダ装置が自車両の存在を検出しやすくすることを目的とする。
【解決手段】送信手段から送信波を出力することによりターゲットから反射されてくる反射波を受信手段が受信し、反射波に基づいてターゲットとの距離や相対速度を検出する車載用レーダ装置において、他レーダ装置から送信された送信波を受信する手段と、当該受信波を自レーダから送信する手段を備えている構成とする。
(もっと読む)
レーダ装置
【課題】分解能を向上しつつ、コスト増加を抑制することができるレーダ装置を提供する。
【解決手段】送信周波数を変化させることにより、アンテナ110の指向性を変えるレーダ装置100であって、アンテナ110は、同一の導体111に、少なくとも1つのスロット115を形成してなるアンテナ部116が間aを隔てて複数形成されたスロットアレイアンテナ110であり、スロットアレイアンテナ110は、移動体10に取り付けられた棒状の支持部材130に巻き付けられて固定されている。
(もっと読む)
周辺監視システム
【課題】背景に四輪車が写り込んだ状態で撮影された自動二輪車を良好に検出できる「周辺監視システム」を提供する。
【解決手段】
カメラ2で撮影した画像中の物体が写り込んでいる領域を物体画像領域310として抽出し、物体画像領域310のエッジ画像に対する画像認識処理によって自動二輪車と四輪車とを識別する。エッジ画像に対する画像認識処理によって自動二輪車が識別されず、かつ、レーダ装置1が、物体画像領域310に写り込む方向に、当該方向について前後に接近している複数の相対位置を計測している場合には、物体画像領域310のエッジ画像から水平方向に所定長さ以上長いエッジを消去した縦エッジ強調画像320を作成し、縦エッジ強調画像320に対する画像認識処理によって自動二輪車を識別する。
(もっと読む)
レーダ計測システム
【課題】レーダ装置を用いて移動体の角速度を算出する「レーダ計測システム」を提供する。
【解決手段】レーダ装置で検出した、同一物体上の点である可能性が認められる程度に近接している二つの検出点a、bの、地面に対する速度ベクトルva、vbを求め、検出点aの位置paを通り速度ベクトルvaと垂直な直線と、検出点bの位置pbを通り速度ベクトルvbと垂直な直線との交点を仮想中心点Oとし、位置paから速度ベクトルvaで単位時間進んだ相対位置qaと、位置pbから速度ベクトルvbで単位時間進んだ相対位置qbを求め、pa-O-qaの角度θaを検出点aの角速度、pb-O-qbの角度θbを検出点bの角速度として求める。そして、両角速度が近似していれば、強検出点に、bに、求めた二つの角速度の平均値を角速度として設定する。
(もっと読む)
アンテナ装置、監視装置、及び車輌
【課題】反射板を部分的に駆動させるだけの簡易な構成で広範囲にわたってビーム走査を実現することのできるF/B比の良好な小型で平面構造のアンテナ装置を提供すること。
【解決手段】所定の平面104内に存在する、位相差を持たせて給電される電波の第1放射源101c、101d及び第2放射源101a、101bと、所定の平面104に対向して配置された平面状の反射部105b、105aと、反射部105a、105bの一部105bを移動させて、第1放射源101c、101dと反射部105bとの間隔を変化させる移動制御部とを備える。
(もっと読む)
車載道路形状識別装置
【課題】適正に自車周辺の道路の道路形状を識別する「道路形状識別装置」を提供する。
【解決手段】レーダ測位装置1で検出した自車後方の他車を他車追尾部3で追尾して得られる各他車の走行軌跡、及び、自車の走行軌跡が、道路形状に沿った走行軌跡である信頼度を、各車両の速度vや加速度dvや角速度dθや方向指示器の操作状態などより算定する。そして、信頼度の高い走行軌跡が表す道路形状を、自車後方の道路形状として推定する。警告装置11は、道路形状推定部10が推定した自車後方の道路形状と、他車追尾部3が追尾している他車の挙動に基づいて、他車の自車に対する衝突の可能性を評価し、衝突の可能性のある他車が存在する場合には、その旨を警告する。
(もっと読む)
21 - 40 / 59
[ Back to top ]