
レーダ装置、及び、相対距離検出方法

【課題】FM−CWレーダ装置による至近距離での相対距離検出精度を向上させる。
【解決手段】レーダ波を送信信号として送信し、物標により反射された前記送信信号を受信信号として受信するレーダ装置において、前記送信信号の周波数が上昇と下降とを交互に繰返すように第1の周波数変調を行い、前記第1の周波数変調が行われたときの第1の送信信号と第1の受信信号との周波数差に基づいて前記物標との第1の相対距離を検出する第1の相対距離検出処理を行う相対距離検出手段は、至近距離では、前記送信信号の周波数を切り替える第2の周波数変調を行い、送受信信号により生成される定在波の波数をカウントすることにより、そのカウント値と、前記第2の周波数変調による切り替え前の周波数と切り替え後の周波数の周波数差とに基づき、前記物標との第2の相対距離を検出するので、精度良く相対距離を検出できる。
【解決手段】レーダ波を送信信号として送信し、物標により反射された前記送信信号を受信信号として受信するレーダ装置において、前記送信信号の周波数が上昇と下降とを交互に繰返すように第1の周波数変調を行い、前記第1の周波数変調が行われたときの第1の送信信号と第1の受信信号との周波数差に基づいて前記物標との第1の相対距離を検出する第1の相対距離検出処理を行う相対距離検出手段は、至近距離では、前記送信信号の周波数を切り替える第2の周波数変調を行い、送受信信号により生成される定在波の波数をカウントすることにより、そのカウント値と、前記第2の周波数変調による切り替え前の周波数と切り替え後の周波数の周波数差とに基づき、前記物標との第2の相対距離を検出するので、精度良く相対距離を検出できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ波を送信信号として送信し、物標により反射された前記送信信号を受信信号として受信するレーダ装置及びこれによる物標の相対距離検出方法に関し、特に、送信信号の周波数が上昇と下降とを交互に繰返す周波数変調を行い、前記送信信号と受信信号の周波数差に基づいて前記物標との相対距離を検出する相対距離検出手段を有するレーダ装置及びこれによる物標の相対距離検出方法に関する。
【背景技術】
【0002】
周波数変調された連続波を送受信して物標との相対距離を検出する、FM−CW(Frequency Modulated-Continuous Wave)レーダ装置が知られており、その一例が、特許文献1に記載されている。図1は、FM−CWレーダ装置が、物標との相対距離を検出する原理を説明する図である。図1(A)には、電磁波をレーダ波として用いるFM−CWレーダ装置の送信信号と受信信号の、時間(横軸)に対する周波数(縦軸)の変化が示される。
【0003】
まず、実線で表される送信信号W1は、周波数fm、振幅ΔFの三角波に従って周波数変調される。すなわち、送信信号W1の周波数は、三角波の上昇期間に対応する周波数上昇期間UP内に周波数変調幅ΔFで漸増し、三角波の下降期間に対応する周波数下降期間DN内に周波数変調幅ΔFで漸減する。そして、これが1/fmを1変調周期として繰返される。
【0004】
この送信信号W1が物標により反射されると、受信信号W2は、点線で示すように、相対距離に応じた時間的遅れΔT1と、相対速度に応じたドップラ周波数ΔDの分、偏移を受ける。そして、このような送信信号W1と受信信号W2をミキシングすると、両者の周波数差に対応して、図1(B)に示すように周波数変化する、ビート信号B1が得られる。このとき、周波数上昇期間UPにおけるビート信号B1の周波数をアップビート周波数fu、周波数下降期間DNの周波数をダウンビート周波数fdとする。
【0005】
ここで、受信信号W2の時間的遅れΔT1は、レーダ波が物標との相対距離を1往復する時間であるので、Cを光速としたとき、相対距離Rは次の式A1で表される。
【0006】
R=C・ΔT1/2 …(式A1)
また、送信信号W1の周波数変調周期1/fm、三角波の振幅ΔFは所与であるので、これらとアップビート周波数fu、ダウンビート周波数fdとから、時間差ΔT1は、次の式A2で表される
ΔT1=(fu+fd)/(2・ΔF・fm) …(式A2)
すると、式A1、式A2から、相対距離Rは、次の式A3により表される。
【0007】
R=C・(fu+fd)/(8・ΔF・fm) …(式A3)
よって、FM−CWレーダ装置は、ビート信号B1をFFT(高速フーリエ変換)処理してアップビート周波数fuとダウンビート周波数fdとを検出することにより、これらと所与である送信信号の周波数変調周期1/fmと周波数変調幅ΔFとを用いて、物標との相対距離Rを上記の式A3に従って算出する。
【0008】
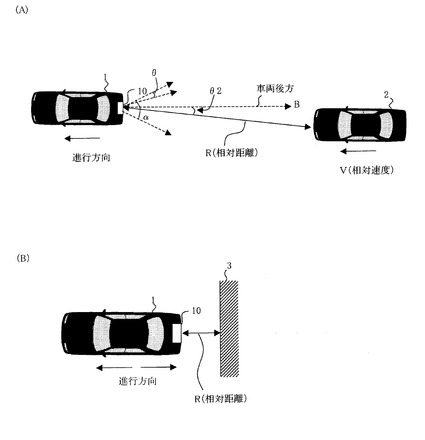
図2は、FM−CWレーダ装置が、車両の後方監視用レーダ装置として用いられる場合の使用状況を示す。図2(A)に示すように、FM−CWレーダ装置であるレーダ装置10は、車両1の後部に搭載される。そして、レーダ装置10は、車両1の後方正面Bを中心とする所定の角度範囲αを往復して揺動するアンテナを用い、このアンテナから上記のように周波数変調された送信信号を送信して、車両1の後方をスキャンする。このとき、レーダ装置10は、所定の方位角θごとに1対の周波数上昇期間と下降期間が対応するように、送信信号の変調周期とアンテナの動作を同期させる。
【0009】
このとき、どの方位角から受信信号が得られるかは未知であるので、上記のFFT処理は、方位角θに対応する送信信号の周波数変調周期ごとに行われる。そうすることにより、物標、つまり後続車両2が存在する、後方正面Bに対する方位角θ2から受信信号が得られたときに、アップ/ダウンビート周波数から方位角θ2における物標との相対距離Rが算出される。
【特許文献1】特開平8−170985号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
ところで、近年では、車両を後進させて車庫に入庫する際に、後方の障害物との相対距離を検出して乗員に通知する、バックセンサの開発が進められている。そして、車両における機器の搭載スペースの制約と、低コスト化の要請とから、上記のようなFM−CWレーダ装置をバックセンサとして併用することが提案されている。
【0011】
図2(B)は、レーダ装置10がバックセンサとして用いられる場合の、使用状況を示す。一般に、運転者が車両を入庫するときは、車庫の壁面3などの障害物に衝突しないように車両を小刻みに前後させながら、停車位置を調整する。よって、バックセンサには、物標、つまり壁面との相対距離Rをセンチ単位、より好適にはミリ単位の精度で検出することが求められる。
【0012】
しかしながら、FM−CWレーダ装置においては、物標との相対距離が近くなると、図1(C)に示すように、送信信号が送信されてから受信信号が受信されるまでの時間差ΔT2は、図1(A)の場合より小さくなる。すると、このとき、図1(D)に示すように、ビート信号B2は周波数上昇期間UPと下降期間DNにおいて図1(B)の場合より低周波となる。すなわち、ビート信号B2の波長が長くなる。
【0013】
ここで、FFT処理は、1波長以上の長さの信号に対し、その信号の波が無限に連続すると仮定して演算が行われる。すると、FM−CWレーダ装置において、例えば周波数1KHzの三角波に従って、中心周波数76GHzのミリ波帯のレーダ波を変調幅100MHzで変調したレーダ波を用いる場合、10メートル〜数メートル以下の至近距離では、送信信号の1変調周期以内にビート信号をFFT処理するときに、その時間内にビート信号の1波長が検出できず、相対距離を正確に検出できないという問題が生じる。
【0014】
そこで、本発明の目的は、至近距離でも精度よく相対距離を検出できるFM−CWレーダ装置、及びその相対距離検出方法を提供することにある。
【課題を解決するための手段】
【0015】
上記の目的を達成するために、本発明の第1の側面は、レーダ波を送信信号として送信し、物標により反射された前記送信信号を受信信号として受信するレーダ装置において、前記送信信号の周波数が上昇と下降とを交互に繰返すように第1の周波数変調を行い、前記第1の周波数変調が行われたときの第1の送信信号と第1の受信信号との周波数差に基づいて前記物標との第1の相対距離を検出する第1の相対距離検出処理を行う相対距離検出手段を有し、前記相対距離検出手段は、過去に検出された前記第1の相対距離が基準距離以上であるときは、前記第1の周波数変調と前記第1の相対距離検出処理とを繰り返し、前記第1の相対距離が前記基準距離未満のときは、前記送信信号の周波数を切り替える第2の周波数変調を行い、前記第2の周波数変調が行われたときに受信する第2の受信信号からドップラ信号を検出し、当該ドップラ信号のレベルが基準レベル未満のときに、当該第2の受信信号のレベルの増減の回数をカウントし、前記カウント値と、前記第2の周波数変調による切り替え前の前記送信信号の周波数と切り替え後の前記送信信号の周波数の周波数差とに基づき、前記物標との第2の相対距離を検出する第2の相対距離検出処理を行うことを特徴とする。
【0016】
上記側面の好ましい態様では、前記相対距離検出手段は、前記第2の相対距離検出処理の後、前記ドップラ信号のレベルが前記基準レベル以上となったときは、前記ドップラ信号の波数と、前記第2の周波数変調が行われたときに送信される第2の送信信号の波長とに基づき前記レーダ装置が移動した移動距離を検出し、前記第2の相対距離と当該移動距離とに基づき前記物標との第3の相対距離を検出する第3の相対距離検出処理を行うことを特徴とする。
【発明の効果】
【0017】
レーダ装置がバックセンサとして用いられる場合は、車両が停止状態と移動状態とを繰返す状況において、静止物との相対距離を精度良く検出することが望まれる。上記側面によれば、過去に検出された相対距離から今回検出しようとする相対距離が至近距離であることを判定する。そして、至近距離であるときには、相対距離検出手段は、前記送信信号の周波数を切り替える第2の周波数変調を行い、前記第2の周波数変調が行われたときに受信する第2の受信信号からドップラ信号を検出し、当該ドップラ信号のレベルが基準レベル未満のとき、つまり、車両が停止状態であるときに、当該第2の受信信号のレベルの増減の回数をカウントし、前記カウント値と、前記第2の周波数変調による切り替え前の前記送信信号の周波数と切り替え後の前記送信信号の周波数の周波数差とに基づき、前記物標との第2の相対距離を検出する第2の相対距離検出処理を行う。すなわち、送信信号が複数の異なる周波数のときに静止物とレーダ装置との間に送信信号と受信信号とから生成される定在波を用いることにより、至近距離における相対距離を検出する。
【0018】
ここで、10〜数メートル以下の至近距離では、ビート信号が低周波となることに起因してFM−CW方式による相対距離検出精度が低下する。しかし、定在波は送信信号と同じ周波数であるので、送受信信号の周波数差に対応するビート信号より高周波となり、かかる問題は生じない。よって、至近距離であっても、良好な相対距離検出精度を得ることができる。
【0019】
上記側面の好ましい態様によれば、前記相対距離検出手段は、前記第2の相対距離検出処理の後、前記ドップラ信号のレベルが前記基準レベル以上となったときは、前記ドップラ信号の波数に基づき前記レーダ装置が移動した移動距離を検出し、前記第2の相対距離と当該移動距離とに基づき前記物標との第3の相対距離を検出する第3の相対距離検出処理を行うので、至近距離において、車両が停止状態のときだけでなく、車両が移動中であっても静止物との相対距離を検出することができる。
【発明を実施するための最良の形態】
【0020】
以下、図面にしたがって本発明の実施の形態について説明する。但し、本発明の技術的範囲はこれらの実施の形態に限定されず、特許請求の範囲に記載された事項とその均等物まで及ぶものである。
【0021】
図3は、本実施形態におけるレーダ装置10の構成図である。まず、レーダ装置10は、図2(A)に示したように、車両の後部に搭載されて、後続車両などの物標との相対距離を検出する後方監視用の車載レーダ装置として用いられる。このとき、レーダ装置10は、FM−CWレーダ装置として機能する。
【0022】
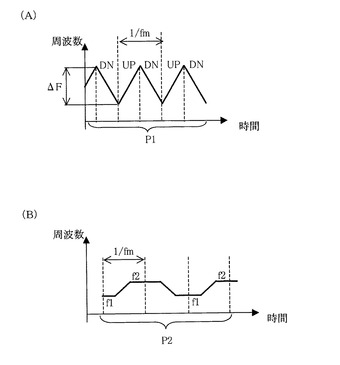
レーダ装置10がFM−CWレーダ装置として機能するときは、変調信号発生器12は、信号処理部24からの指示に応答して、FM−CW方式の周波数変調信号を生成する。そして、発振器14は、その周波数変調信号に応じて周波数変調されたレーダ波を生成する。ここで、図4において、横軸を時間、縦軸を周波数として、レーダ波の変調パターンを示す。すると、このとき生成される、FM−CW方式によるレーダ波の変調パターンは、図4(A)に示すように、周波数fm(例えば、1KHz)の三角波をベースバンドとして、周波数変調幅ΔF(例えば1MHz)で周波数の漸増と漸減とが交互に繰返される、周波数変調パターンP1となる。
【0023】
そして、生成されたレーダ波は増幅器15により増幅された後、サーキュレータ16からアンテナ17に出力される。すると、アンテナ17は、このレーダ波を送信信号として送信する。このとき、アンテナ駆動部18は、アンテナ17を揺動させて所定の角度範囲αを往復運動させる。これにより、角度範囲αがレーダ波により、反復してスキャンされる。また、アンテナ駆動部18によるアンテナ17の揺動動作は、所定の方位角単位θごとに、1対の周波数上昇期間UPと下降期間DNとが対応するように同期がとられる。そして、アンテナ17は、物標で反射された送信信号を受信信号として受信する。すると、受信信号は、サーキュレータ16から増幅器19を介してミキサ20に入力される。
【0024】
ミキサ20は、送信信号の一部と受信信号とを混合し、両者の周波数差に対応するビート信号を生成する。そして、ビート信号は、帯域通過フィルタ22により高周波ノイズが除去された後、信号処理部24に入力される。
【0025】
信号処理部24は、一例として、CPU、ROM、RAM等を有するマイクロコンピュータで構成される。信号処理部24では、アナログの入力信号がAD変換され、CPUがROMに予め格納された各種処理プログラムに従って、RAMを作業領域として用いながらディジタル信号に基づき各種演算処理を実行する。
【0026】
具体的には、信号処理部24は、まずビート信号をFFTしてアップ/ダウンビート周波数とを検出し、それぞれの周波数の信号レベルを検出する。この処理は、上記のアンテナが揺動する方位角θごとに、つまり、周波数上昇期間UPと周波数下降期間DNとからなる送信信号の1変調周期(1/fm)ごとに行われる。そして、信号処理部24は、これらを用いて物標との相対距離を検出する。よって、かかる処理を実行する信号処理部24が、「相対距離検出手段」24aに対応する。また、信号処理部24は、相対距離のほかに、相対速度、方位角等を検出し、これらの検出結果は車両の衝突対応制御を行う電子制御装置(図示を省略)に出力される。
【0027】
さらに、信号処理部24は、アンテナ駆動部18を制御して、アンテナの揺動範囲を増大または縮小させる。そうすることにより、送信信号でスキャンされる角度範囲が変更される。かかる処理を行う信号処理部24は、「送受信角度範囲制御手段」24bに対応する。
【0028】
本実施の形態においては、レーダ装置10は、図2(B)に示したように、車両のバックセンサとしても用いられる。ここで、レーダ装置10がバックセンサとして用いられるときは、物標との相対距離が10〜数メートル以下の至近距離であることが想定される。その場合、図1で説明したように、FM−CW方式で相対距離を検出しようとすると、ビート周波数が低周波となり、1変調周期内のFFT処理時間中に1波長が検出されなくなる。すると、相対距離の検出精度が低下してしまう。
【0029】
また、レーダ装置10がバックセンサとして用いられるときは、車両の停止状態と前後方への移動とが交互に繰返される蓋然性が大きいと想定される。さらに、このとき、検出対象の物標は車庫の壁面などの静止物が想定される。よって、レーダ装置10は、至近距離では、車両の停止状態を検出し、車両が停止したときに、FM−CW方式とは異なる方式、つまり定在波を用いて静止物との相対距離を検出する。そのために、レーダ装置10は、さらに次のような構成を有する。
【0030】
まず、信号処理部24は、周波数変調器12に、送信信号の周波数変調パターンの変更を指示する。具体的には、図4(A)に示したFM−CW方式の変調パターンP1から、図4(B)に示すような変調パターンP2に変更するように指示する。変調パターンP2では、一定周波数f1の送信信号が生成された後、送信信号の周波数を周波数f1より高い周波数f2に、そして、その逆に、直線的に切替えが行われる。そして、この変調パターンP2においては、周波数f1からf2への切替、及びその逆の切替は、それぞれ変調パターンP1の1変調周期と同じ時間内に行われる。
【0031】
送信信号の周波数がf1に固定されると、レーダ装置10と静止物との間の空間において、同一の周波数の送受信信号が干渉して定在波が生成される。この定在波はアンテナ17で受信され、増幅された受信信号がミキサ20に入力される。すると、ミキサ20は、アンテナ17が受信する定在波を送信信号と混合して中間周波信号にダウンコンバートする。
【0032】
また、信号処理部24は、この中間周波信号をFFT処理してドップラ周波数を検出し、そのレベル、つまりドップラ信号のレベルを検出する。そして、ドップラ信号のレベルがゼロのとき、つまり、相対速度がゼロのときは、静止物の物標に対して車両が停止状態であると判断できる。よって、この場合、信号処理部24は、アンテナ17で受信する定在波のレベルを検出し、そのレベルが、送信信号の周波数をf1からf2に上昇させたときにどのように変化するかを観測することで、至近距離での静止物との相対距離を検出する。
【0033】
よって、かかる処理を実行する信号処理部24が、「相対距離検出手段」24aに対応する。このとき、レーダ装置10は、定在波レーダとして機能することで、バックセンサとしての機能を果たす。
【0034】
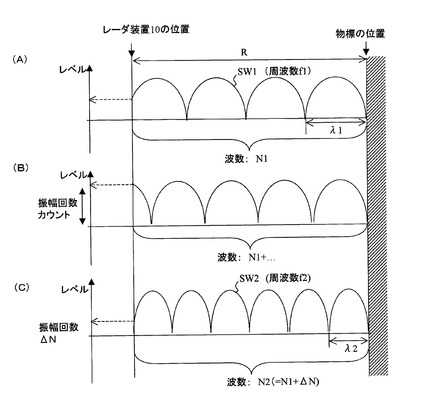
ここで、図5を用いて、定在波を用いた相対距離検出方法について説明する。図5(A)に示すように、送信信号の周波数がf1のときに生成される定在波SW1の波長λ1(=C/f1、Cは光速)を用いると、静止物との相対距離Rにおいて生成される定在波SW1の波数N1は、次の式B1により表される。
【0035】
N1=R/λ1 …(B1)
次に、図5(B)に示すように、信号処理部24は、周波数変調パターンP2によって送信信号の周波数をf1からf2に上昇させるときに、波数の増分ΔNを、定在波のレベルの振幅をカウントすることにより検出する。そして、図5(C)に示すように、送信信号の周波数がf2のときに生成される定在波SW2の波長λ2(=C/f2)を用いると、静止物との相対距離Rにおいて生成される定在波SW1の波数N2は、次の式B2により表される。
【0036】
N2=R/λ2 …(B2)
ここで、検出されたΔNは、ΔN=N2−N1であるので、上記の式B1、B2から、次の式B3が成り立つ。
【0037】
ΔN=N2−N1=R(1/λ1−1/λ2) …(B3)
そして、λ1=C/f1、λ2=C/f2であることから、上記の式B3は、次のようになる。
【0038】
ΔN=R・(f1−f2)/C …(B4)
すると、上記の式B4において、ΔN、周波数f1、f2は既知である。よって、信号処理部24は、次の式B5により相対距離Rを算出する。
【0039】
R=ΔN・C/(f1−f2)…(B5)
このような構成により、本実施形態のレーダ装置10は、比較的遠距離ではFM−CWレーダ装置として機能することで、後方の他車両を監視する車載レーダとしての機能を果たし、至近距離では定在波レーダとして機能することで、車両後方の静止物との相対距離を検出するバックセンサとしての機能を果たす。すなわち、本実施形態によれば、レーダ装置10はFM−CWレーダ装置としてのハード構成を活用しながら、至近距離の検出精度を向上させることができ、バックセンサとしての機能を兼ね備えることができる。
【0040】
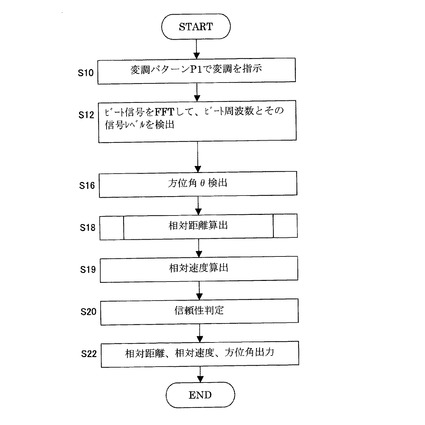
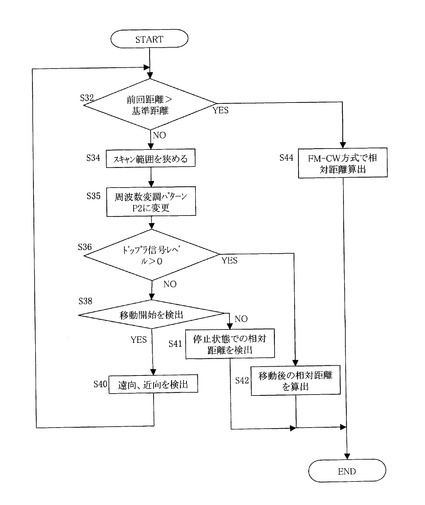
図6は、本実施形態におけるレーダ装置10の動作手順を説明するフローチャート図である。図6に示す手順は、アンテナ17がレーダ波により角度範囲αを1回スキャンするごとに実行される、信号処理部24の動作手順に対応する。
【0041】
まず、信号処理部24は、上記の周波数変調パターンP1での周波数変調を変調信号発生器12に指示する(S10)。すると、物標が存在する方位角においては、ミキサ20によりビート信号が生成される。次に、信号処理部24は、ビート信号をFFT処理し、送信波の周波数上昇期間と下降期間それぞれにおける送信波と受信波の周波数差に対応する周波数、つまりアップ/ダウンビート周波数と、それぞれの周波数におけるビート信号のレベルとを検出する(S12)。そして、信号処理部24は、ビート信号のレベルが、近隣の方位角のうち最も大きい方位角θを物標の方位角として検出する(S16)。
【0042】
また、信号処理部24は、その方位角における物標との相対距離を算出する(S18)。このとき、信号処理部24は、後に詳述するように、前回のスキャンで検出された相対距離と基準距離とを比較し、今回検出しようとする相対距離が基準距離以上の比較的遠距離であるときは、FM−CW方式により、つまりアップ/ダウンビート周波数から相対距離を算出し、基準距離未満の至近距離であるときは、定在波を用いた方法により物標との相対距離を算出する。
【0043】
さらに、信号処理部24は、FM−CW方式により相対距離を検出したときは、アップ/ダウンビート周波数から物標の相対速度も算出する(S19)。なお、相対速度Vは、次式A4により求められる。次式A4において、f0は、図1で示した送信信号W1の周波数変調幅ΔFにおける中心周波数を示す。
【0044】
V=C・(fd−fu)/(4・f0) …(式A4)
そして、信号処理部24は、過去のスキャンにおける検出結果と、今回のスキャンでの検出結果の連続性の有無に基づいて検出結果の信頼性を判定し(S20)、信頼性を有すると判定した出力結果を車両の制御装置に出力する(S22)。
【0045】
図7は、図6で示した相対距離検出手順S18のサブルーチンに対応する手順を示すフローチャート図である。まず、信号処理部24は、前回のスキャンで検出された相対距離が基準距離を上回るかを判定する(S32)。ここで、基準距離は、FM―CW方式により正確な相対距離検出が担保される距離範囲の下限、例えば数メートル〜10メートル程度に設定される。
【0046】
判定結果が「YES」のときは、FM−CW方式により正確な相対距離検出が可能であるので、信号処理部24は、FM−CW方式により、物標との相対距離を検出する(S44)。すなわち、信号処理部24は、FFT処理により得られたアップ/ダウンビート周波数から、上述した式A3に基づいて、相対距離を算出する。そして、図7の手順を終了し、図5で示した手順S19に進む。
【0047】
一方、判定結果が「NO」のとき、つまり、FM−CW方式では今回のスキャンで検出される物標との相対距離の精度が担保されないとき、手順S34に進む。
【0048】
そして、信号処理部24は、アンテナ駆動部18を制御して、アンテナが揺動する角度範囲を小さくすることで、スキャン範囲を狭くする(S34)。そうすることで、1スキャンあたりの所要時間を短くでき、至近距離での静止物との相対距離検出処理全体をより速く実行することができる。また、そうすることで、後述するように定在波を用いて相対距離を検出するときに、検出対象の物標の数を減らすことができるため、マルチターゲットによる影響を小さくすることができる。
【0049】
そして、その場合、信号処理部24は、送信信号変調パターンをP1からP2に切り替える(S35)。すると、周波数f1に固定された送信信号と、静止物で反射された反射信号とが干渉し、定在波が生成される。また、ミキサ20により、周波数f1またはf2の送信信号とその受信信号と周波数差に対応するドップラ信号が生成される。
【0050】
信号処理部24は、まず、受信信号から検出されるドップラ信号のレベルから、車両の停止状態を検出する。すなわち、ドップラ信号のレベルが0のときは(S36のNO)、静止物である物標との相対速度がゼロであるので、車両は停止状態にあると判断される。
【0051】
そして、このドップラ信号のレベルが0より大きくならなければ、つまり、車両と物標との相対速度が発生せず、車両が停止状態にあるときは(S38のNO)、信号処理部24は、定在波のレベル変化から、静止物との相対距離を検出する(S41)。
【0052】
本実施形態ではさらに、至近距離において車両が再び移動する場合に、ドップラ信号を用いることで、至近距離において移動中の車両の、静止物との相対距離を検出する。まず、信号処理部24は、上記のドップラ信号のレベルが0より大きくなると、車両と物標との相対速度が発生したこと、つまり車両の移動開始を検出する(S38のYES)。
【0053】
ここで、ドップラ信号によると、移動距離は算出できても、移動方向は算出できない。よって、その場合、信号処理部24は、定在波を用い、次のような手順で、移動方向が静止物から遠ざかる方向、つまり遠向か、近づく方向、つまり近向かを判定する(S40)。
【0054】
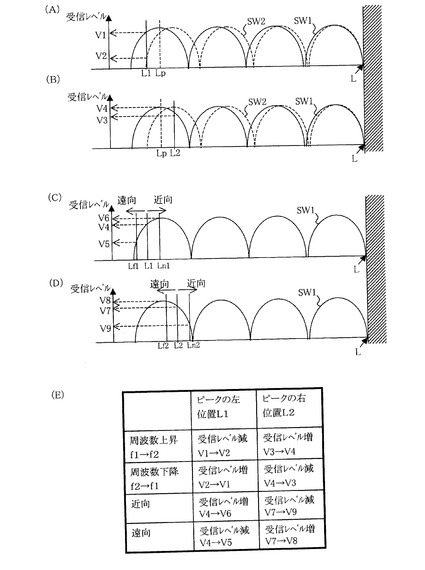
図8は遠向と近向の判定方法を説明する図である。図8は、横軸上の位置Lにある物標と、位置L1またはL2にあるレーダ装置10との間に生成される定在波SW1、2を示す。そして、縦軸はレーダ装置10における定在波の受信レベルを示す。
【0055】
図8(A)、(B)において、送信信号の周波数がf1のときの定在波SW1(実線で図示)と、f2のときの定在波SW2(点線で図示)を示す。ここで、送信信号の周波数がf1であり、定在波SW1が生成されていると仮定する。
【0056】
まず、レーダ装置10の位置が、定在波SW1のピークが検出される位置Lpの左側の位置L1(図8(A))、あるいは右側の位置L2(図8(A))のいずれであるかを判別する。そのために、レーダ装置10が送信信号の周波数をf1からf2に上昇させると、レーダ装置10と物標との間に形成される定在波の波数は増加する。このとき、図8(A)に示すように、レーダ装置10が、定在波SW1のピークが形成される位置Lpの左側の位置L1に位置する場合には、定在波SW1の受信レベルV1は、定在波SW2の受信レベルV2まで低下する。一方、図8(B)に示すように、レーダ装置10が、定在波SW1のピークが形成される位置Lpの右側の位置L2に位置する場合には、定在波SW1の受信レベルV3は、定在波SW2の受信レベルV4まで上昇する。
【0057】
また、反対に、レーダ装置10が、送信信号の周波数をf2からf1に下降させると、レーダ装置10と物標との間に形成される定在波の波数は減少する。すると、この場合、図8(A)、(B)から、上記の定在波の受信レベルの増減関係とは逆の関係が成立する。
【0058】
このように、送信信号の周波数をf1からf2に上昇、または、f2からf1に下降させた直後の定在波の受信レベルを観測することにより、レーダ装置10の位置が定在波のピークが形成される位置Lpの左側の位置L1か、右側の位置L2かが判定できる。
【0059】
次に、上記の位置L1またはL2を基準として、車両の移動方向の遠向/近向を判定する。まず、図8(C)に示すように、レーダ装置10の位置が定在波SW1のピークが形成される位置Lpの左側の位置L1のとき、送信信号の周波数を例えばf1に固定したまま、レーダ装置10が位置Lf1、つまり物標から遠向に移動すると、定在波SW1の受信レベルV4は、V5に低下する。反対に、レーダ装置10が位置Ln1、つまり物標から近向に移動すると、定在波SW1の受信レベルV4は、V6に上昇する。一方、図8(D)に示すように、レーダ装置10の位置が定在波SW1のピークが形成される位置Lpの右側の位置L2のとき、送信信号の周波数を例えばf1に固定したまま、レーダ装置10が位置Lf2、つまり物標から遠向に移動すると、定在波SW1の受信レベルV7はV8に上昇し、位置Ln2、つまり物標から近向に移動すると、受信レベルV9に低下する。
【0060】
上記のような対応関係は、図8(E)のテーブルに示される。このようなテーブルは、予め信号処理部24のROMに格納される。そして、信号処理部24は、このテーブルを参照することにより、遠向または近向を判定する。
【0061】
すると、信号処理部24は、再度手順S32〜S36を実行し、手順S36でドップラ信号のレベルから車両が移動中であるかを判定する。このときは、移動開始後であるので、相対速度が生じておりドップラ信号のレベルは0より大きい。よって、判定結果は「YES」であるので、手順S42に進む。
【0062】
そして、ドップラ周波数から、車両の移動距離を算出する。ここで、ドップラ周波数をfp、送信信号の周波数をf1とすると、受信信号の周波数は、f1+fpとなる。そして、車両と物標との相対速度、つまり車両の移動速度をV、光速をCとすると、次の式C1が成り立つ。
【0063】
f1+fp=((C+V)/C)・f1、すなわち、fp=(V/C)・f1 …(式C1)
ここで、T秒間に車両が速度V(m/sec)で移動距離S(m)移動する間に、ドップラ信号がN波生じたとすると、N、T、V、S、及びfpの関係は、次のようになる。
【0064】
S=V・T(m) …(式C2)
fp=N/T(Hz) …(式C3)
すると、ドップラ信号の1波長が検出される間に車両が移動する距離S0は、次の式C4で表される。
【0065】
S0=S/(2・N) …(式C4)
そして、式C3からN=T・fpとなり、これと式C2とを式C4に代入すると、
S0=V・T/(2・T・fp)=V/2・fp …(式C4)となる。
【0066】
そして、式C1を式C4に代入すると、
S0=V/(2・(V/C)・f1)=(1/2)・(C/f1)=λ/2 …(式C5)
となる(λは、周波数f1の送信信号の1波長、すなわちλ=C/f1)。
【0067】
ここで、上記のように計算される移動距離は、移動距離の絶対値であるので、移動方向を含まない。よって、先に手順S40で用いた遠向または近向の判定結果を用い、手順S41で求めた停止時の相対距離R0を基準にして、移動後の相対距離Rを、遠向の場合は次の式C6により、近向きの場合は次の式C7により算出する。
【0068】
R=R0+N・λ/2 …(式C6)
R=R0−N・λ/2 …(式C7)
以上の手順が、手順S18として実行される。そうすることにより、レーダ装置10は至近距離における物標との相対距離を精度よく検出でき、バックセンサとしての機能を果たすことができる。
【0069】
なお、上述の手順において、手順S42では、周波数変調パターンP2ではなく、ドップラ信号を検出するために、周波数を一定の周波数、例えばf1に固定するようにしてもよい。
【0070】
上述の説明においては、車両の後方監視用レーダ装置がバックセンサを兼ねる場合を例に説明した。しかし、FM−CWレーダ装置の構成を有しながら、至近距離での物標との相対距離を検出するレーダ装置であれば、車両の後方監視用レーダに限られず、本実施形態は適用される。
【0071】
以上説明したとおり、本実施形態によれば、比較的遠距離の物標との相対距離を検出するときには、FM−CW方式で距離を検出し、至近距離では、定在波を用いて相対距離を検出する。このとき、定在波は送信信号と同じ周波数であるので、送受信信号の周波数差に対応するビート信号より高周波となり、ビート信号が低周波となることに起因してFM−CW方式による相対距離検出精度が低下するという問題を解決でき、良好な相対距離検出精度を得ることができる。
【図面の簡単な説明】
【0072】
【図1】FM−CWレーダ装置が、物標との相対距離を検出する原理を説明する図である。
【図2】FM−CWレーダ装置が、車両の後方監視用レーダ装置として用いられる場合の使用状況を示す図である。
【図3】本実施形態におけるレーダ装置10の構成図である。
【図4】本実施形態におけるレーダ波の変調パターンを説明する図である。
【図5】定在波を用いた相対距離検出方法について説明する図である。
【図6】本実施形態におけるレーダ装置10の動作手順を説明するフローチャート図である。
【図7】図6で示した相対距離検出手順S18のサブルーチンに対応する手順を示すフローチャート図である。
【図8】車両の移動方向の、遠向と近向の判定方法を説明する図である。
【符号の説明】
【0073】
10:レーダ装置、24:信号処理部、24a:相対距離検出手段、24b:送受信角度範囲制御手段
【技術分野】
【0001】
本発明は、レーダ波を送信信号として送信し、物標により反射された前記送信信号を受信信号として受信するレーダ装置及びこれによる物標の相対距離検出方法に関し、特に、送信信号の周波数が上昇と下降とを交互に繰返す周波数変調を行い、前記送信信号と受信信号の周波数差に基づいて前記物標との相対距離を検出する相対距離検出手段を有するレーダ装置及びこれによる物標の相対距離検出方法に関する。
【背景技術】
【0002】
周波数変調された連続波を送受信して物標との相対距離を検出する、FM−CW(Frequency Modulated-Continuous Wave)レーダ装置が知られており、その一例が、特許文献1に記載されている。図1は、FM−CWレーダ装置が、物標との相対距離を検出する原理を説明する図である。図1(A)には、電磁波をレーダ波として用いるFM−CWレーダ装置の送信信号と受信信号の、時間(横軸)に対する周波数(縦軸)の変化が示される。
【0003】
まず、実線で表される送信信号W1は、周波数fm、振幅ΔFの三角波に従って周波数変調される。すなわち、送信信号W1の周波数は、三角波の上昇期間に対応する周波数上昇期間UP内に周波数変調幅ΔFで漸増し、三角波の下降期間に対応する周波数下降期間DN内に周波数変調幅ΔFで漸減する。そして、これが1/fmを1変調周期として繰返される。
【0004】
この送信信号W1が物標により反射されると、受信信号W2は、点線で示すように、相対距離に応じた時間的遅れΔT1と、相対速度に応じたドップラ周波数ΔDの分、偏移を受ける。そして、このような送信信号W1と受信信号W2をミキシングすると、両者の周波数差に対応して、図1(B)に示すように周波数変化する、ビート信号B1が得られる。このとき、周波数上昇期間UPにおけるビート信号B1の周波数をアップビート周波数fu、周波数下降期間DNの周波数をダウンビート周波数fdとする。
【0005】
ここで、受信信号W2の時間的遅れΔT1は、レーダ波が物標との相対距離を1往復する時間であるので、Cを光速としたとき、相対距離Rは次の式A1で表される。
【0006】
R=C・ΔT1/2 …(式A1)
また、送信信号W1の周波数変調周期1/fm、三角波の振幅ΔFは所与であるので、これらとアップビート周波数fu、ダウンビート周波数fdとから、時間差ΔT1は、次の式A2で表される
ΔT1=(fu+fd)/(2・ΔF・fm) …(式A2)
すると、式A1、式A2から、相対距離Rは、次の式A3により表される。
【0007】
R=C・(fu+fd)/(8・ΔF・fm) …(式A3)
よって、FM−CWレーダ装置は、ビート信号B1をFFT(高速フーリエ変換)処理してアップビート周波数fuとダウンビート周波数fdとを検出することにより、これらと所与である送信信号の周波数変調周期1/fmと周波数変調幅ΔFとを用いて、物標との相対距離Rを上記の式A3に従って算出する。
【0008】
図2は、FM−CWレーダ装置が、車両の後方監視用レーダ装置として用いられる場合の使用状況を示す。図2(A)に示すように、FM−CWレーダ装置であるレーダ装置10は、車両1の後部に搭載される。そして、レーダ装置10は、車両1の後方正面Bを中心とする所定の角度範囲αを往復して揺動するアンテナを用い、このアンテナから上記のように周波数変調された送信信号を送信して、車両1の後方をスキャンする。このとき、レーダ装置10は、所定の方位角θごとに1対の周波数上昇期間と下降期間が対応するように、送信信号の変調周期とアンテナの動作を同期させる。
【0009】
このとき、どの方位角から受信信号が得られるかは未知であるので、上記のFFT処理は、方位角θに対応する送信信号の周波数変調周期ごとに行われる。そうすることにより、物標、つまり後続車両2が存在する、後方正面Bに対する方位角θ2から受信信号が得られたときに、アップ/ダウンビート周波数から方位角θ2における物標との相対距離Rが算出される。
【特許文献1】特開平8−170985号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
ところで、近年では、車両を後進させて車庫に入庫する際に、後方の障害物との相対距離を検出して乗員に通知する、バックセンサの開発が進められている。そして、車両における機器の搭載スペースの制約と、低コスト化の要請とから、上記のようなFM−CWレーダ装置をバックセンサとして併用することが提案されている。
【0011】
図2(B)は、レーダ装置10がバックセンサとして用いられる場合の、使用状況を示す。一般に、運転者が車両を入庫するときは、車庫の壁面3などの障害物に衝突しないように車両を小刻みに前後させながら、停車位置を調整する。よって、バックセンサには、物標、つまり壁面との相対距離Rをセンチ単位、より好適にはミリ単位の精度で検出することが求められる。
【0012】
しかしながら、FM−CWレーダ装置においては、物標との相対距離が近くなると、図1(C)に示すように、送信信号が送信されてから受信信号が受信されるまでの時間差ΔT2は、図1(A)の場合より小さくなる。すると、このとき、図1(D)に示すように、ビート信号B2は周波数上昇期間UPと下降期間DNにおいて図1(B)の場合より低周波となる。すなわち、ビート信号B2の波長が長くなる。
【0013】
ここで、FFT処理は、1波長以上の長さの信号に対し、その信号の波が無限に連続すると仮定して演算が行われる。すると、FM−CWレーダ装置において、例えば周波数1KHzの三角波に従って、中心周波数76GHzのミリ波帯のレーダ波を変調幅100MHzで変調したレーダ波を用いる場合、10メートル〜数メートル以下の至近距離では、送信信号の1変調周期以内にビート信号をFFT処理するときに、その時間内にビート信号の1波長が検出できず、相対距離を正確に検出できないという問題が生じる。
【0014】
そこで、本発明の目的は、至近距離でも精度よく相対距離を検出できるFM−CWレーダ装置、及びその相対距離検出方法を提供することにある。
【課題を解決するための手段】
【0015】
上記の目的を達成するために、本発明の第1の側面は、レーダ波を送信信号として送信し、物標により反射された前記送信信号を受信信号として受信するレーダ装置において、前記送信信号の周波数が上昇と下降とを交互に繰返すように第1の周波数変調を行い、前記第1の周波数変調が行われたときの第1の送信信号と第1の受信信号との周波数差に基づいて前記物標との第1の相対距離を検出する第1の相対距離検出処理を行う相対距離検出手段を有し、前記相対距離検出手段は、過去に検出された前記第1の相対距離が基準距離以上であるときは、前記第1の周波数変調と前記第1の相対距離検出処理とを繰り返し、前記第1の相対距離が前記基準距離未満のときは、前記送信信号の周波数を切り替える第2の周波数変調を行い、前記第2の周波数変調が行われたときに受信する第2の受信信号からドップラ信号を検出し、当該ドップラ信号のレベルが基準レベル未満のときに、当該第2の受信信号のレベルの増減の回数をカウントし、前記カウント値と、前記第2の周波数変調による切り替え前の前記送信信号の周波数と切り替え後の前記送信信号の周波数の周波数差とに基づき、前記物標との第2の相対距離を検出する第2の相対距離検出処理を行うことを特徴とする。
【0016】
上記側面の好ましい態様では、前記相対距離検出手段は、前記第2の相対距離検出処理の後、前記ドップラ信号のレベルが前記基準レベル以上となったときは、前記ドップラ信号の波数と、前記第2の周波数変調が行われたときに送信される第2の送信信号の波長とに基づき前記レーダ装置が移動した移動距離を検出し、前記第2の相対距離と当該移動距離とに基づき前記物標との第3の相対距離を検出する第3の相対距離検出処理を行うことを特徴とする。
【発明の効果】
【0017】
レーダ装置がバックセンサとして用いられる場合は、車両が停止状態と移動状態とを繰返す状況において、静止物との相対距離を精度良く検出することが望まれる。上記側面によれば、過去に検出された相対距離から今回検出しようとする相対距離が至近距離であることを判定する。そして、至近距離であるときには、相対距離検出手段は、前記送信信号の周波数を切り替える第2の周波数変調を行い、前記第2の周波数変調が行われたときに受信する第2の受信信号からドップラ信号を検出し、当該ドップラ信号のレベルが基準レベル未満のとき、つまり、車両が停止状態であるときに、当該第2の受信信号のレベルの増減の回数をカウントし、前記カウント値と、前記第2の周波数変調による切り替え前の前記送信信号の周波数と切り替え後の前記送信信号の周波数の周波数差とに基づき、前記物標との第2の相対距離を検出する第2の相対距離検出処理を行う。すなわち、送信信号が複数の異なる周波数のときに静止物とレーダ装置との間に送信信号と受信信号とから生成される定在波を用いることにより、至近距離における相対距離を検出する。
【0018】
ここで、10〜数メートル以下の至近距離では、ビート信号が低周波となることに起因してFM−CW方式による相対距離検出精度が低下する。しかし、定在波は送信信号と同じ周波数であるので、送受信信号の周波数差に対応するビート信号より高周波となり、かかる問題は生じない。よって、至近距離であっても、良好な相対距離検出精度を得ることができる。
【0019】
上記側面の好ましい態様によれば、前記相対距離検出手段は、前記第2の相対距離検出処理の後、前記ドップラ信号のレベルが前記基準レベル以上となったときは、前記ドップラ信号の波数に基づき前記レーダ装置が移動した移動距離を検出し、前記第2の相対距離と当該移動距離とに基づき前記物標との第3の相対距離を検出する第3の相対距離検出処理を行うので、至近距離において、車両が停止状態のときだけでなく、車両が移動中であっても静止物との相対距離を検出することができる。
【発明を実施するための最良の形態】
【0020】
以下、図面にしたがって本発明の実施の形態について説明する。但し、本発明の技術的範囲はこれらの実施の形態に限定されず、特許請求の範囲に記載された事項とその均等物まで及ぶものである。
【0021】
図3は、本実施形態におけるレーダ装置10の構成図である。まず、レーダ装置10は、図2(A)に示したように、車両の後部に搭載されて、後続車両などの物標との相対距離を検出する後方監視用の車載レーダ装置として用いられる。このとき、レーダ装置10は、FM−CWレーダ装置として機能する。
【0022】
レーダ装置10がFM−CWレーダ装置として機能するときは、変調信号発生器12は、信号処理部24からの指示に応答して、FM−CW方式の周波数変調信号を生成する。そして、発振器14は、その周波数変調信号に応じて周波数変調されたレーダ波を生成する。ここで、図4において、横軸を時間、縦軸を周波数として、レーダ波の変調パターンを示す。すると、このとき生成される、FM−CW方式によるレーダ波の変調パターンは、図4(A)に示すように、周波数fm(例えば、1KHz)の三角波をベースバンドとして、周波数変調幅ΔF(例えば1MHz)で周波数の漸増と漸減とが交互に繰返される、周波数変調パターンP1となる。
【0023】
そして、生成されたレーダ波は増幅器15により増幅された後、サーキュレータ16からアンテナ17に出力される。すると、アンテナ17は、このレーダ波を送信信号として送信する。このとき、アンテナ駆動部18は、アンテナ17を揺動させて所定の角度範囲αを往復運動させる。これにより、角度範囲αがレーダ波により、反復してスキャンされる。また、アンテナ駆動部18によるアンテナ17の揺動動作は、所定の方位角単位θごとに、1対の周波数上昇期間UPと下降期間DNとが対応するように同期がとられる。そして、アンテナ17は、物標で反射された送信信号を受信信号として受信する。すると、受信信号は、サーキュレータ16から増幅器19を介してミキサ20に入力される。
【0024】
ミキサ20は、送信信号の一部と受信信号とを混合し、両者の周波数差に対応するビート信号を生成する。そして、ビート信号は、帯域通過フィルタ22により高周波ノイズが除去された後、信号処理部24に入力される。
【0025】
信号処理部24は、一例として、CPU、ROM、RAM等を有するマイクロコンピュータで構成される。信号処理部24では、アナログの入力信号がAD変換され、CPUがROMに予め格納された各種処理プログラムに従って、RAMを作業領域として用いながらディジタル信号に基づき各種演算処理を実行する。
【0026】
具体的には、信号処理部24は、まずビート信号をFFTしてアップ/ダウンビート周波数とを検出し、それぞれの周波数の信号レベルを検出する。この処理は、上記のアンテナが揺動する方位角θごとに、つまり、周波数上昇期間UPと周波数下降期間DNとからなる送信信号の1変調周期(1/fm)ごとに行われる。そして、信号処理部24は、これらを用いて物標との相対距離を検出する。よって、かかる処理を実行する信号処理部24が、「相対距離検出手段」24aに対応する。また、信号処理部24は、相対距離のほかに、相対速度、方位角等を検出し、これらの検出結果は車両の衝突対応制御を行う電子制御装置(図示を省略)に出力される。
【0027】
さらに、信号処理部24は、アンテナ駆動部18を制御して、アンテナの揺動範囲を増大または縮小させる。そうすることにより、送信信号でスキャンされる角度範囲が変更される。かかる処理を行う信号処理部24は、「送受信角度範囲制御手段」24bに対応する。
【0028】
本実施の形態においては、レーダ装置10は、図2(B)に示したように、車両のバックセンサとしても用いられる。ここで、レーダ装置10がバックセンサとして用いられるときは、物標との相対距離が10〜数メートル以下の至近距離であることが想定される。その場合、図1で説明したように、FM−CW方式で相対距離を検出しようとすると、ビート周波数が低周波となり、1変調周期内のFFT処理時間中に1波長が検出されなくなる。すると、相対距離の検出精度が低下してしまう。
【0029】
また、レーダ装置10がバックセンサとして用いられるときは、車両の停止状態と前後方への移動とが交互に繰返される蓋然性が大きいと想定される。さらに、このとき、検出対象の物標は車庫の壁面などの静止物が想定される。よって、レーダ装置10は、至近距離では、車両の停止状態を検出し、車両が停止したときに、FM−CW方式とは異なる方式、つまり定在波を用いて静止物との相対距離を検出する。そのために、レーダ装置10は、さらに次のような構成を有する。
【0030】
まず、信号処理部24は、周波数変調器12に、送信信号の周波数変調パターンの変更を指示する。具体的には、図4(A)に示したFM−CW方式の変調パターンP1から、図4(B)に示すような変調パターンP2に変更するように指示する。変調パターンP2では、一定周波数f1の送信信号が生成された後、送信信号の周波数を周波数f1より高い周波数f2に、そして、その逆に、直線的に切替えが行われる。そして、この変調パターンP2においては、周波数f1からf2への切替、及びその逆の切替は、それぞれ変調パターンP1の1変調周期と同じ時間内に行われる。
【0031】
送信信号の周波数がf1に固定されると、レーダ装置10と静止物との間の空間において、同一の周波数の送受信信号が干渉して定在波が生成される。この定在波はアンテナ17で受信され、増幅された受信信号がミキサ20に入力される。すると、ミキサ20は、アンテナ17が受信する定在波を送信信号と混合して中間周波信号にダウンコンバートする。
【0032】
また、信号処理部24は、この中間周波信号をFFT処理してドップラ周波数を検出し、そのレベル、つまりドップラ信号のレベルを検出する。そして、ドップラ信号のレベルがゼロのとき、つまり、相対速度がゼロのときは、静止物の物標に対して車両が停止状態であると判断できる。よって、この場合、信号処理部24は、アンテナ17で受信する定在波のレベルを検出し、そのレベルが、送信信号の周波数をf1からf2に上昇させたときにどのように変化するかを観測することで、至近距離での静止物との相対距離を検出する。
【0033】
よって、かかる処理を実行する信号処理部24が、「相対距離検出手段」24aに対応する。このとき、レーダ装置10は、定在波レーダとして機能することで、バックセンサとしての機能を果たす。
【0034】
ここで、図5を用いて、定在波を用いた相対距離検出方法について説明する。図5(A)に示すように、送信信号の周波数がf1のときに生成される定在波SW1の波長λ1(=C/f1、Cは光速)を用いると、静止物との相対距離Rにおいて生成される定在波SW1の波数N1は、次の式B1により表される。
【0035】
N1=R/λ1 …(B1)
次に、図5(B)に示すように、信号処理部24は、周波数変調パターンP2によって送信信号の周波数をf1からf2に上昇させるときに、波数の増分ΔNを、定在波のレベルの振幅をカウントすることにより検出する。そして、図5(C)に示すように、送信信号の周波数がf2のときに生成される定在波SW2の波長λ2(=C/f2)を用いると、静止物との相対距離Rにおいて生成される定在波SW1の波数N2は、次の式B2により表される。
【0036】
N2=R/λ2 …(B2)
ここで、検出されたΔNは、ΔN=N2−N1であるので、上記の式B1、B2から、次の式B3が成り立つ。
【0037】
ΔN=N2−N1=R(1/λ1−1/λ2) …(B3)
そして、λ1=C/f1、λ2=C/f2であることから、上記の式B3は、次のようになる。
【0038】
ΔN=R・(f1−f2)/C …(B4)
すると、上記の式B4において、ΔN、周波数f1、f2は既知である。よって、信号処理部24は、次の式B5により相対距離Rを算出する。
【0039】
R=ΔN・C/(f1−f2)…(B5)
このような構成により、本実施形態のレーダ装置10は、比較的遠距離ではFM−CWレーダ装置として機能することで、後方の他車両を監視する車載レーダとしての機能を果たし、至近距離では定在波レーダとして機能することで、車両後方の静止物との相対距離を検出するバックセンサとしての機能を果たす。すなわち、本実施形態によれば、レーダ装置10はFM−CWレーダ装置としてのハード構成を活用しながら、至近距離の検出精度を向上させることができ、バックセンサとしての機能を兼ね備えることができる。
【0040】
図6は、本実施形態におけるレーダ装置10の動作手順を説明するフローチャート図である。図6に示す手順は、アンテナ17がレーダ波により角度範囲αを1回スキャンするごとに実行される、信号処理部24の動作手順に対応する。
【0041】
まず、信号処理部24は、上記の周波数変調パターンP1での周波数変調を変調信号発生器12に指示する(S10)。すると、物標が存在する方位角においては、ミキサ20によりビート信号が生成される。次に、信号処理部24は、ビート信号をFFT処理し、送信波の周波数上昇期間と下降期間それぞれにおける送信波と受信波の周波数差に対応する周波数、つまりアップ/ダウンビート周波数と、それぞれの周波数におけるビート信号のレベルとを検出する(S12)。そして、信号処理部24は、ビート信号のレベルが、近隣の方位角のうち最も大きい方位角θを物標の方位角として検出する(S16)。
【0042】
また、信号処理部24は、その方位角における物標との相対距離を算出する(S18)。このとき、信号処理部24は、後に詳述するように、前回のスキャンで検出された相対距離と基準距離とを比較し、今回検出しようとする相対距離が基準距離以上の比較的遠距離であるときは、FM−CW方式により、つまりアップ/ダウンビート周波数から相対距離を算出し、基準距離未満の至近距離であるときは、定在波を用いた方法により物標との相対距離を算出する。
【0043】
さらに、信号処理部24は、FM−CW方式により相対距離を検出したときは、アップ/ダウンビート周波数から物標の相対速度も算出する(S19)。なお、相対速度Vは、次式A4により求められる。次式A4において、f0は、図1で示した送信信号W1の周波数変調幅ΔFにおける中心周波数を示す。
【0044】
V=C・(fd−fu)/(4・f0) …(式A4)
そして、信号処理部24は、過去のスキャンにおける検出結果と、今回のスキャンでの検出結果の連続性の有無に基づいて検出結果の信頼性を判定し(S20)、信頼性を有すると判定した出力結果を車両の制御装置に出力する(S22)。
【0045】
図7は、図6で示した相対距離検出手順S18のサブルーチンに対応する手順を示すフローチャート図である。まず、信号処理部24は、前回のスキャンで検出された相対距離が基準距離を上回るかを判定する(S32)。ここで、基準距離は、FM―CW方式により正確な相対距離検出が担保される距離範囲の下限、例えば数メートル〜10メートル程度に設定される。
【0046】
判定結果が「YES」のときは、FM−CW方式により正確な相対距離検出が可能であるので、信号処理部24は、FM−CW方式により、物標との相対距離を検出する(S44)。すなわち、信号処理部24は、FFT処理により得られたアップ/ダウンビート周波数から、上述した式A3に基づいて、相対距離を算出する。そして、図7の手順を終了し、図5で示した手順S19に進む。
【0047】
一方、判定結果が「NO」のとき、つまり、FM−CW方式では今回のスキャンで検出される物標との相対距離の精度が担保されないとき、手順S34に進む。
【0048】
そして、信号処理部24は、アンテナ駆動部18を制御して、アンテナが揺動する角度範囲を小さくすることで、スキャン範囲を狭くする(S34)。そうすることで、1スキャンあたりの所要時間を短くでき、至近距離での静止物との相対距離検出処理全体をより速く実行することができる。また、そうすることで、後述するように定在波を用いて相対距離を検出するときに、検出対象の物標の数を減らすことができるため、マルチターゲットによる影響を小さくすることができる。
【0049】
そして、その場合、信号処理部24は、送信信号変調パターンをP1からP2に切り替える(S35)。すると、周波数f1に固定された送信信号と、静止物で反射された反射信号とが干渉し、定在波が生成される。また、ミキサ20により、周波数f1またはf2の送信信号とその受信信号と周波数差に対応するドップラ信号が生成される。
【0050】
信号処理部24は、まず、受信信号から検出されるドップラ信号のレベルから、車両の停止状態を検出する。すなわち、ドップラ信号のレベルが0のときは(S36のNO)、静止物である物標との相対速度がゼロであるので、車両は停止状態にあると判断される。
【0051】
そして、このドップラ信号のレベルが0より大きくならなければ、つまり、車両と物標との相対速度が発生せず、車両が停止状態にあるときは(S38のNO)、信号処理部24は、定在波のレベル変化から、静止物との相対距離を検出する(S41)。
【0052】
本実施形態ではさらに、至近距離において車両が再び移動する場合に、ドップラ信号を用いることで、至近距離において移動中の車両の、静止物との相対距離を検出する。まず、信号処理部24は、上記のドップラ信号のレベルが0より大きくなると、車両と物標との相対速度が発生したこと、つまり車両の移動開始を検出する(S38のYES)。
【0053】
ここで、ドップラ信号によると、移動距離は算出できても、移動方向は算出できない。よって、その場合、信号処理部24は、定在波を用い、次のような手順で、移動方向が静止物から遠ざかる方向、つまり遠向か、近づく方向、つまり近向かを判定する(S40)。
【0054】
図8は遠向と近向の判定方法を説明する図である。図8は、横軸上の位置Lにある物標と、位置L1またはL2にあるレーダ装置10との間に生成される定在波SW1、2を示す。そして、縦軸はレーダ装置10における定在波の受信レベルを示す。
【0055】
図8(A)、(B)において、送信信号の周波数がf1のときの定在波SW1(実線で図示)と、f2のときの定在波SW2(点線で図示)を示す。ここで、送信信号の周波数がf1であり、定在波SW1が生成されていると仮定する。
【0056】
まず、レーダ装置10の位置が、定在波SW1のピークが検出される位置Lpの左側の位置L1(図8(A))、あるいは右側の位置L2(図8(A))のいずれであるかを判別する。そのために、レーダ装置10が送信信号の周波数をf1からf2に上昇させると、レーダ装置10と物標との間に形成される定在波の波数は増加する。このとき、図8(A)に示すように、レーダ装置10が、定在波SW1のピークが形成される位置Lpの左側の位置L1に位置する場合には、定在波SW1の受信レベルV1は、定在波SW2の受信レベルV2まで低下する。一方、図8(B)に示すように、レーダ装置10が、定在波SW1のピークが形成される位置Lpの右側の位置L2に位置する場合には、定在波SW1の受信レベルV3は、定在波SW2の受信レベルV4まで上昇する。
【0057】
また、反対に、レーダ装置10が、送信信号の周波数をf2からf1に下降させると、レーダ装置10と物標との間に形成される定在波の波数は減少する。すると、この場合、図8(A)、(B)から、上記の定在波の受信レベルの増減関係とは逆の関係が成立する。
【0058】
このように、送信信号の周波数をf1からf2に上昇、または、f2からf1に下降させた直後の定在波の受信レベルを観測することにより、レーダ装置10の位置が定在波のピークが形成される位置Lpの左側の位置L1か、右側の位置L2かが判定できる。
【0059】
次に、上記の位置L1またはL2を基準として、車両の移動方向の遠向/近向を判定する。まず、図8(C)に示すように、レーダ装置10の位置が定在波SW1のピークが形成される位置Lpの左側の位置L1のとき、送信信号の周波数を例えばf1に固定したまま、レーダ装置10が位置Lf1、つまり物標から遠向に移動すると、定在波SW1の受信レベルV4は、V5に低下する。反対に、レーダ装置10が位置Ln1、つまり物標から近向に移動すると、定在波SW1の受信レベルV4は、V6に上昇する。一方、図8(D)に示すように、レーダ装置10の位置が定在波SW1のピークが形成される位置Lpの右側の位置L2のとき、送信信号の周波数を例えばf1に固定したまま、レーダ装置10が位置Lf2、つまり物標から遠向に移動すると、定在波SW1の受信レベルV7はV8に上昇し、位置Ln2、つまり物標から近向に移動すると、受信レベルV9に低下する。
【0060】
上記のような対応関係は、図8(E)のテーブルに示される。このようなテーブルは、予め信号処理部24のROMに格納される。そして、信号処理部24は、このテーブルを参照することにより、遠向または近向を判定する。
【0061】
すると、信号処理部24は、再度手順S32〜S36を実行し、手順S36でドップラ信号のレベルから車両が移動中であるかを判定する。このときは、移動開始後であるので、相対速度が生じておりドップラ信号のレベルは0より大きい。よって、判定結果は「YES」であるので、手順S42に進む。
【0062】
そして、ドップラ周波数から、車両の移動距離を算出する。ここで、ドップラ周波数をfp、送信信号の周波数をf1とすると、受信信号の周波数は、f1+fpとなる。そして、車両と物標との相対速度、つまり車両の移動速度をV、光速をCとすると、次の式C1が成り立つ。
【0063】
f1+fp=((C+V)/C)・f1、すなわち、fp=(V/C)・f1 …(式C1)
ここで、T秒間に車両が速度V(m/sec)で移動距離S(m)移動する間に、ドップラ信号がN波生じたとすると、N、T、V、S、及びfpの関係は、次のようになる。
【0064】
S=V・T(m) …(式C2)
fp=N/T(Hz) …(式C3)
すると、ドップラ信号の1波長が検出される間に車両が移動する距離S0は、次の式C4で表される。
【0065】
S0=S/(2・N) …(式C4)
そして、式C3からN=T・fpとなり、これと式C2とを式C4に代入すると、
S0=V・T/(2・T・fp)=V/2・fp …(式C4)となる。
【0066】
そして、式C1を式C4に代入すると、
S0=V/(2・(V/C)・f1)=(1/2)・(C/f1)=λ/2 …(式C5)
となる(λは、周波数f1の送信信号の1波長、すなわちλ=C/f1)。
【0067】
ここで、上記のように計算される移動距離は、移動距離の絶対値であるので、移動方向を含まない。よって、先に手順S40で用いた遠向または近向の判定結果を用い、手順S41で求めた停止時の相対距離R0を基準にして、移動後の相対距離Rを、遠向の場合は次の式C6により、近向きの場合は次の式C7により算出する。
【0068】
R=R0+N・λ/2 …(式C6)
R=R0−N・λ/2 …(式C7)
以上の手順が、手順S18として実行される。そうすることにより、レーダ装置10は至近距離における物標との相対距離を精度よく検出でき、バックセンサとしての機能を果たすことができる。
【0069】
なお、上述の手順において、手順S42では、周波数変調パターンP2ではなく、ドップラ信号を検出するために、周波数を一定の周波数、例えばf1に固定するようにしてもよい。
【0070】
上述の説明においては、車両の後方監視用レーダ装置がバックセンサを兼ねる場合を例に説明した。しかし、FM−CWレーダ装置の構成を有しながら、至近距離での物標との相対距離を検出するレーダ装置であれば、車両の後方監視用レーダに限られず、本実施形態は適用される。
【0071】
以上説明したとおり、本実施形態によれば、比較的遠距離の物標との相対距離を検出するときには、FM−CW方式で距離を検出し、至近距離では、定在波を用いて相対距離を検出する。このとき、定在波は送信信号と同じ周波数であるので、送受信信号の周波数差に対応するビート信号より高周波となり、ビート信号が低周波となることに起因してFM−CW方式による相対距離検出精度が低下するという問題を解決でき、良好な相対距離検出精度を得ることができる。
【図面の簡単な説明】
【0072】
【図1】FM−CWレーダ装置が、物標との相対距離を検出する原理を説明する図である。
【図2】FM−CWレーダ装置が、車両の後方監視用レーダ装置として用いられる場合の使用状況を示す図である。
【図3】本実施形態におけるレーダ装置10の構成図である。
【図4】本実施形態におけるレーダ波の変調パターンを説明する図である。
【図5】定在波を用いた相対距離検出方法について説明する図である。
【図6】本実施形態におけるレーダ装置10の動作手順を説明するフローチャート図である。
【図7】図6で示した相対距離検出手順S18のサブルーチンに対応する手順を示すフローチャート図である。
【図8】車両の移動方向の、遠向と近向の判定方法を説明する図である。
【符号の説明】
【0073】
10:レーダ装置、24:信号処理部、24a:相対距離検出手段、24b:送受信角度範囲制御手段
【特許請求の範囲】
【請求項1】
レーダ波を送信信号として送信し、物標により反射された前記送信信号を受信信号として受信するレーダ装置において、
前記送信信号の周波数が上昇と下降とを交互に繰返すように第1の周波数変調を行い、前記第1の周波数変調が行われたときの第1の送信信号と第1の受信信号との周波数差に基づいて前記物標との第1の相対距離を検出する第1の相対距離検出処理を行う相対距離検出手段を有し、
前記相対距離検出手段は、過去に検出された前記第1の相対距離が基準距離以上であるときは、前記第1の周波数変調と前記第1の相対距離検出処理とを繰り返し、前記第1の相対距離が前記基準距離未満のときは、前記送信信号の周波数を切り替える第2の周波数変調を行い、前記第2の周波数変調が行われたときに受信された第2の受信信号からドップラ信号を検出し、当該ドップラ信号のレベルが基準レベル未満のときに、当該第2の受信信号のレベルの増減の回数をカウントし、前記カウントの値と、前記第2の周波数変調による切り替え前の前記送信信号の周波数と切り替え後の前記送信信号の周波数の周波数差とに基づき、前記物標との第2の相対距離を検出する第2の相対距離検出処理を行うことを特徴とするレーダ装置。
【請求項2】
請求項1において、
前記相対距離検出手段は、前記第2の相対距離検出処理の後、前記ドップラ信号のレベルが前記基準レベル以上となったときは、前記ドップラ信号の波数と、前記第2の周波数変調が行われたときに送信される第2の送信信号の波長とに基づき前記レーダ装置が移動した移動距離を検出し、前記第2の相対距離と当該移動距離とに基づき前記物標との第3の相対距離を検出する第3の相対距離検出処理を行うことを特徴とするレーダ装置。
【請求項3】
請求項2において、
前記相対距離検出手段は、前記ドップラ信号のレベルが前記基準レベル以上となるときの前記第2の受信信号のレベルの増減に基づき、前記レーダ装置が移動した方向を検出し、当該移動方向にさらに基づいて前記第3の相対距離検出処理を行うことを特徴とするレーダ装置。
【請求項4】
請求項1において、
前記第1の相対距離が前記基準距離以上のときは第1の角度範囲で、前記基準距離未満のときは前記第1の角度範囲より小さい第2の角度範囲で、前記第1の送信信号の送信と前記第1の受信信号の受信を行う、送受信角度範囲制御手段をさらに有することを特徴とするレーダ装置。
【請求項5】
レーダ波を送信信号として送信し、物標により反射された前記送信信号を受信信号として受信するレーダ装置による前記物標との相対距離検出方法において、
前記送信信号の周波数が上昇と下降とを交互に繰返すように第1の周波数変調を行い、
前記第1の周波数変調が行われたときの第1の送信信号と第1の受信信号との周波数差に基づいて前記物標との第1の相対距離を検出する第1の相対距離検出処理を行い、
過去に検出された前記第1の相対距離が基準距離以上であるときは、前記第1の周波数変調と前記第1の相対距離検出処理とを繰り返し、前記第1の相対距離が前記基準距離未満のときは、前記送信信号の周波数を切り替える第2の周波数変調を行い、前記第2の周波数変調が行われたときに受信する第2の受信信号から検出されるドップラ信号のレベルが基準レベル未満のときに、当該第2の受信信号のレベルの増減の回数をカウントし、前記カウントの値と、前記第2の周波数変調による切り替え前の前記送信信号の周波数と切り替え後の前記送信信号の周波数の周波数差とに基づき、前記物標との第2の相対距離を検出する第2の相対距離検出処理を行うことを特徴とする物標検出方法。
【請求項1】
レーダ波を送信信号として送信し、物標により反射された前記送信信号を受信信号として受信するレーダ装置において、
前記送信信号の周波数が上昇と下降とを交互に繰返すように第1の周波数変調を行い、前記第1の周波数変調が行われたときの第1の送信信号と第1の受信信号との周波数差に基づいて前記物標との第1の相対距離を検出する第1の相対距離検出処理を行う相対距離検出手段を有し、
前記相対距離検出手段は、過去に検出された前記第1の相対距離が基準距離以上であるときは、前記第1の周波数変調と前記第1の相対距離検出処理とを繰り返し、前記第1の相対距離が前記基準距離未満のときは、前記送信信号の周波数を切り替える第2の周波数変調を行い、前記第2の周波数変調が行われたときに受信された第2の受信信号からドップラ信号を検出し、当該ドップラ信号のレベルが基準レベル未満のときに、当該第2の受信信号のレベルの増減の回数をカウントし、前記カウントの値と、前記第2の周波数変調による切り替え前の前記送信信号の周波数と切り替え後の前記送信信号の周波数の周波数差とに基づき、前記物標との第2の相対距離を検出する第2の相対距離検出処理を行うことを特徴とするレーダ装置。
【請求項2】
請求項1において、
前記相対距離検出手段は、前記第2の相対距離検出処理の後、前記ドップラ信号のレベルが前記基準レベル以上となったときは、前記ドップラ信号の波数と、前記第2の周波数変調が行われたときに送信される第2の送信信号の波長とに基づき前記レーダ装置が移動した移動距離を検出し、前記第2の相対距離と当該移動距離とに基づき前記物標との第3の相対距離を検出する第3の相対距離検出処理を行うことを特徴とするレーダ装置。
【請求項3】
請求項2において、
前記相対距離検出手段は、前記ドップラ信号のレベルが前記基準レベル以上となるときの前記第2の受信信号のレベルの増減に基づき、前記レーダ装置が移動した方向を検出し、当該移動方向にさらに基づいて前記第3の相対距離検出処理を行うことを特徴とするレーダ装置。
【請求項4】
請求項1において、
前記第1の相対距離が前記基準距離以上のときは第1の角度範囲で、前記基準距離未満のときは前記第1の角度範囲より小さい第2の角度範囲で、前記第1の送信信号の送信と前記第1の受信信号の受信を行う、送受信角度範囲制御手段をさらに有することを特徴とするレーダ装置。
【請求項5】
レーダ波を送信信号として送信し、物標により反射された前記送信信号を受信信号として受信するレーダ装置による前記物標との相対距離検出方法において、
前記送信信号の周波数が上昇と下降とを交互に繰返すように第1の周波数変調を行い、
前記第1の周波数変調が行われたときの第1の送信信号と第1の受信信号との周波数差に基づいて前記物標との第1の相対距離を検出する第1の相対距離検出処理を行い、
過去に検出された前記第1の相対距離が基準距離以上であるときは、前記第1の周波数変調と前記第1の相対距離検出処理とを繰り返し、前記第1の相対距離が前記基準距離未満のときは、前記送信信号の周波数を切り替える第2の周波数変調を行い、前記第2の周波数変調が行われたときに受信する第2の受信信号から検出されるドップラ信号のレベルが基準レベル未満のときに、当該第2の受信信号のレベルの増減の回数をカウントし、前記カウントの値と、前記第2の周波数変調による切り替え前の前記送信信号の周波数と切り替え後の前記送信信号の周波数の周波数差とに基づき、前記物標との第2の相対距離を検出する第2の相対距離検出処理を行うことを特徴とする物標検出方法。
【図1】



【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−58335(P2009−58335A)
【公開日】平成21年3月19日(2009.3.19)
【国際特許分類】
【出願番号】特願2007−225176(P2007−225176)
【出願日】平成19年8月31日(2007.8.31)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成21年3月19日(2009.3.19)
【国際特許分類】
【出願日】平成19年8月31日(2007.8.31)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]