
Fターム[5J070BF08]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 監視方向又は範囲 (317) | 後方 (59)
Fターム[5J070BF08]に分類される特許
41 - 59 / 59
車両用アンテナ
【課題】後退補助指示システムは、車両の後方に、所定のカバレッジゾーンにおいて検出カバレッジを提供するセンサを含む。
【解決手段】センサは、近傍界において擬似コリメートアンテナパターンを有するRF信号を送信するようになっている送信アンテナを含む。送信アンテナは、バンパ横板部を横切って配置されるハウジングと、ハウジング内に配置され、各々が一対の内面とスロット面とを有する複数の柔軟性導波チャネルと、複数の柔軟導波チャネルの少なくとも1つに結合された少なくとも1つの同軸プローブとを備える。
(もっと読む)
障害物検知システム
【課題】複数のレーダ装置を備えた車両において電波干渉が生じた場合、送信周波数等を変更して電波干渉を回避しなくてはならない。本発明は、各レーダ装置の送信周波数等の情報を共有化することにより、送信周波数等の変更後に、再び他レーダ装置との電波干渉を引き起こさないようなレーダ装置を提供する。
【解決手段】近接した複数のレーダ装置が、通信を介してお互いの変調態様情報を共有することにより、外界からの電波干渉時でも共有相手に対する電波干渉が発生しないようにする。
(もっと読む)
車載レーダ装置

【課題】精度良く他車の検出を行う「車載レーダ装置」を提供する。
【解決手段】x方向に並べて配置した二つのアンテナA、Bを用いて計測される他車の相対距離DAとDBとの一方に変化が生じなくなったならば、他車のy方向座標として、前回他車について検出したy座標y(-1)を設定する(b、c、d)。他車のx座標としては、相対距離DAとDBとのうちの一方に変化が生じている場合には、変化生じている相対距離を半径とし、当該相対距離を計測したアンテナ101を中心とする円弧上の、y座標がy(-1)となる位置のx座標を設定する(b,d)。ここで、x方向を前後方向として他車が平行移動する場合、他車がy方向正面にあるアンテナ101では、相対距離の変化が観測されなくなる。
(もっと読む)
レーダー装置
【課題】移動体に搭載され、送信波を送信し、反射波を受信して、物体を検出する車載レーダー装置に関し、他のレーダー装置の送信波との干渉を防止する。
【解決手段】共通の時刻に関する無線信号を受信する受信部30を設け、制御部20が、時分割で割り付けられた、レーダーセンサ10と、レーダーセンサ10以外の前記電磁波を送信する他のレーダーセンサ12,14,16との送信期間の内、受信した時刻に関する無線信号に応じて、割り当てられた送信期間に、レーダーセンサから前記電磁波を送信する。このため、移動体搭載レーダーであっても、時分割制御で、電波干渉を防止でき、正確なレーダー検知が可能となる。
(もっと読む)
電波式距離センサ
【課題】温度依存性が低く、近距離の対象物であっても良好に距離を検出することのできる電波式距離センサを提供する。
【解決手段】検出距離に応じた周期的な基準信号faを生成するパルス生成手段1と、基準信号faを振幅偏移変調して変調信号F、Faを送信する送信手段2と、対象物10によって反射した変調信号F、Fbを受信してパルス状の受信信号fbに復調する受信手段3と、基準信号faと復調された受信信号fbとに基づいて対象物10との距離を検出する距離検出手段5とを備える電波式距離センサであって、復調された基準信号faと受信信号fbとの排他的論理和をとることにより、位相差パルスfcを生成する位相差検出手段4と、位相差パルスfcに基づいて対象物10との距離を検出する距離検出手段5とを備える。
(もっと読む)
レーダー装置
【課題】自動車などの車両の後方確認用レーダーとしての利用が好適なレーダー装置を提供する。
【解決手段】自動車のサイドミラーなどの後方確認装置に、アンテナ素子及び高周波回路を取り付ける。後方確認装置のミラー本体12は、すりガラスなどからなる基体12aと、光路となる透明ガラス12bと、基体12aと透明ガラス12bとの間に設けられ、反射体として機能する金属膜12cと、透明ガラス12bの表面、つまり鏡面を覆う保護膜12dとを備える。アンテナ素子であるパッチアレイアンテナ14は、透明電極材料によって構成され、透明ガラス12bの表面、つまり鏡面に形成されている。これにより、視界を妨げることなく、鏡面側に存在する物体を監視することが可能となる。
(もっと読む)
車載センサの補正装置および方法
【課題】レーダやカメラといった異なる種類のセンサを併用して周辺物の位置を検出するシステムの出荷後であっても、何れかのセンサに発生した位置ずれを適切に補正可能な「車載センサの補正装置および方法」を提供する。
【解決手段】カメラ1の撮影画像に対して画像認識処理を行うことで、撮影画像内における周辺車両のピクセル位置を検出する画像処理部2と、レーダ3により検出された周辺車両の位置を撮影画像内におけるピクセル位置に換算する情報処理部4と、両ピクセル位置の差分がなくなるような補正量を求め、この補正量に従ってカメラ1の向きを補正する補正処理部5とを設け、車両の走行中におけるレーダ3の検出結果に合わせてカメラ1の向きを補正することにより、システムの出荷後であっても、任意のタイミングで、カメラ1に発生した位置ずれがなくなるようにカメラ1の向きを適切に調整できるようにする。
(もっと読む)
周辺車両位置検出装置および周辺車両の位置予測方法
【課題】周辺車両がそれまでの動きと異なる動きをしたときでも、最終的に求める周辺車両の位置の精度を向上させることが可能な「周辺車両位置検出装置および周辺車両の位置予測方法」を提供する。
【解決手段】カメラ2による周辺車両の撮影画像を用いて、画像処理部3が周辺車両のウィンカーの点滅状態から周辺車両の移動する方向を検出し、演算部4がその検出結果に応じて周辺車両の予測位置を設定する。そして、演算部4が、その予測位置とレーダ1による測定位置との比重計算によって周辺車両の位置を算出することにより、周辺車両の実際の動きに合わせた予測位置が求められられるようにして、予測精度を向上させることができるようにする。
(もっと読む)
障害物検出装置
【課題】 車両の後方、後側方の障害物検出に適した構成を有する障害物検出装置を提供する。
【解決手段】 後方、後側方の障害物を検出する電波レーダの検出結果を読み込み(ステップS1)、車速センサやシフトセンサの出力を基にして進行方向を検出し、その結果を読み込む(ステップS3)。後退中の場合には、反射波強度MPが第1の判定しきい値MPth1を超える場合には、そのトラッキング時間がしきい値tc_th1を超える場合に障害物と判定し(ステップS7〜S13)、第2の判定しきい値MPth2を超え、MPth1以下である場合には、そのトラッキング時間がしきい値tc_th2を超える場合(ここで、tc_th2>tc_th1である。)に障害物と判定する(ステップS15〜S21)。後退中以外は接近中の物体についてのみ第1の判定しきい値MPth1により障害物判定を行う(ステップS27〜S39)。
(もっと読む)
車両の周辺監視装置
【課題】 レーダ装置を駐車支援と追突検知に兼用しながらも、運転者が意識しなくとも様々な状況下でレーダ装置から必要な出力信号を適切に獲得できる車両の周辺監視装置を提供する。
【解決手段】 車両外部へ向けて検出電波を発信する発信手段1と、外部物体からの反射電波を受信する受信手段2と、検出電波と反射電波に基づいて外部物体を検出する信号処理手段3とを備えたレーダ装置4と、前記レーダ装置4を駐車操車時の支援モニタとして動作させる駐車支援モードと走行操車時の追突検知モニタとして動作させる追突検知モードの何れかの動作モードに切替設定するモード設定手段5を備えた車両の周辺監視装置であって、前記モード設定手段5は、運転姿勢データや車速データ等に基づく車両状態データに基づいて前記レーダ装置を駐車支援モードと追突検知モードの何れかに設定する。
(もっと読む)
車両用物体検出装置
【課題】 アレーアンテナを用いて高精度に物体を検出できる領域が拡張された車両用物体検出装置を提供すること。
【解決手段】 車両に搭載され、自車両周辺の物体(移動体又は停止物)を検出する車両用物体検出装置に、第一の領域においては第一の精度で物体を検出し、第一の領域とは異なる第二の領域においては第一の精度よりも低い第二の精度で物体を検出する1以上の検出器から成る物体検出手段と、物体検出手段により第一の領域内の複数の場所でそれぞれ検出された複数の物体相対位置に基づいて物体のその後の相対移動軌跡を推定する軌跡推定手段と、物体検出手段により第二の領域内で検出された物体相対位置と軌跡推定手段により推定された物体の推定相対移動軌跡とが重なったとき、第二の領域内で検出された物体相対位置を第二の精度より高い第三の精度で検出されたものとみなす精度補正手段とを備える。第三の精度は、例えば、第一の精度と等しい。
(もっと読む)
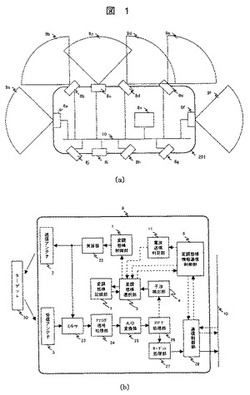
少なくとも1つの側方および後方の周辺状況捕捉装置を有する自動車用の危険検知システム
本発明は、少なくとも1つの、側方および後方の周辺状況捕捉装置を有する、自動車用の危険検知システムに関する。本発明は、少なくとも1つの、側方および後方の周辺状況捕捉装置、周辺状況解釈装置および運転者反応支援装置を有する、自動車用の危険検知システムであって、周辺状況捕捉装置が、本危険検知システムを搭載した自動車に対して相対移動する移動対象物を捉えるシステムに関する。この危険検知システムは走行方向に逆向きに配置されている2つのセンサを有している。このシステムはデータの算出用として、センサ毎に少なくとも1つの評価および解釈ユニットを有している。 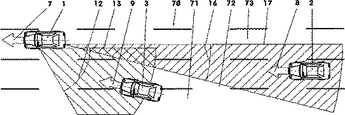 (もっと読む)
(もっと読む)
障害物検知装置
障害物検知装置は、所定の広がり角を有するビームを複数の異なる方位に向けて順次的に放射し、各方位における障害物からの反射波を受信することにより、各方位についてビームの放射角度範囲内に存在する障害物を検知する障害物検知部(11)と、障害物検知部から出力される各方位についての反射波の受信信号に基づいて、それぞれの方位における障害物と自車両との間を代表する距離を算出する距離算出部(12)と、距離算出部で算出された各方位についての距離を画像作成基準として扱うことにより、各方位に放射されたビームの放射角度範囲内において2次元的に展開された図形を障害物画像として作成し、当該障害物画像を表示するための画像データを生成して出力する障害物画像作成部(14)と、障害物画像作成部によって作成された画像データを受け取り、障害物と自車両との位置関係を示す画像を表示する表示部(15)とを備える。  (もっと読む)
(もっと読む)
障害物検知装置
【課題】 乗員に違和感を与えずに障害物との距離を正確に伝えることができる障害物検知装置を提供する。
【解決手段】 障害物検知装置10は所定の検知領域に波動を送信する送信部と前記波動が障害物21によって反射された反射波を受信する受信部とからなるセンサ部7により、車両1の障害物21を検知する。センサ部7の出力により障害物21までの距離を計測する。検知距離可変回路16により最大検知距離L1内における予め定められた検知距離L2,L3を変化させる。警報手段20により検知距離に対応して段階的に警報を発生する。
(もっと読む)
障害物検知装置
【課題】車両周辺の障害物を検知し報知する障害物検知装置において、車両遠方での障害物に対しては、音による報知を極力減らすとともに、その障害物が急接近したときには、ドライバーに速やかに伝えるようにする。
【解決手段】車両遠方と近傍を区分する距離閾値DT2を設定し、その距離閾値DT2以上の位置で障害物を検知したときは、その障害物の距離情報の時間変化から車両との相対速度を算出する。その相対速度が所定の速度VT以上のときには、急接近を表す報知(図3(b)、図4(b))を行う。また、その相対速度が、VT以下のときには、音による報知は行わない。
(もっと読む)
車両用後側方警報装置
【課題】 ガードレールや壁等の路側の静止物に対しては警報せず、後方から接近する車両や自車両の死角領域に留まる車両に対しては確実に警報する車両用後側方警報装置を提供する。
【解決手段】 警報対象判定手段は、ピーク検出手段により求められたピークタイミングをもとに着目するサンプリングタイミングを設定する着目サンプリングタイミング設定手段と、着目されたサンプリングタイミングのFFT演算結果について、周波数閾値設定手段により設定された周波数閾値以上の周波数成分が存在するか否かを判定する周波数判定手段とを備え、前方接近物認識手段により、物体が自車両の前方方向から接近していると判定された場合において、周波数判定手段により周波数閾値以上の周波数成分が存在すると判定されたときに、この物体は静止物であるとして警報対象でないと判定する。
(もっと読む)
周辺監視システム
【課題】 車両など設置場所が限定され、アンテナを広範囲わたって走査させることが難
しい場合であっても、レーダ手段を増やすことなく、1つのレーダ手段で複数方向の状況
を適切に監視することができ、システムの構成を簡素化することができる周辺監視システ
ムを提供すること。
【解決手段】 アンテナ15を介して電磁波を送信するとともに反射波を受信する機能を
有するレーダ装置10と、レーダ装置10のアンテナ15と対向する位置に一方の開口端
が並設され、他方の開口端がそれぞれ所定の方向に向けて配設された導波管31〜34と
、導波管31〜34及びアンテナ前方に対して電磁波を遮蔽又は伝送可能な状態に切り替
える開閉手段26と、開閉手段26により導波管31〜34及びアンテナ前方に対する電
磁波の遮蔽又は伝送状態を切り替えながら、電磁波が伝送可能な状態にある導波管又はア
ンテナ前方に対応した電磁波の送信制御及び反射波の受信制御を行う送受信制御手段11
aとを装備する。
(もっと読む)
車両周辺監視装置
【課題】 車両周辺の監視を廉価に行うと共に、車両周辺監視の要処理時間を短くすることができること。
【解決手段】 車両1の異なる箇所に搭載した複数台の受信器A0〜D0と、その受信器A0〜D0が受信する電磁波を出力する送信器Eとを配設し、車両1付近に検出対象が存在しない状態で、送信器Eが出力した電磁波を車両1に搭載した受信器A0〜D0で受信し、その受信電界のパターンを記憶回路に記憶させ、送信器Eが出力した電磁波を車両1に搭載した複数台の受信器A0〜D0で受信し、その受信電界のパターンを記憶回路に記憶しているパターンと比較して、車両1の周辺状態を検出する。
(もっと読む)
自動車用物体認識システム
本発明は、少なくとも2個の物体認識センサを備え、該センサの認識範囲が進行方向において部分的に重なる、自動車用の物体認識システムに関する。本発明によれば、第1の物体認識センサが、所定の第1垂直認識角度において、その認識範囲内で道路表面を付随的に検出し、第2の物体認識センサは、第1の物体認識センサの第1垂直認識角度未満である所定の第2垂直認識角度において、第1の物体認識センサの認識範囲内で、進行方向において道路表面を検出しない。両方の物体認識センサが物体を認識したときに限り、評価ユニットが第1の物体認識センサの認識範囲において物体の存在を推測する。 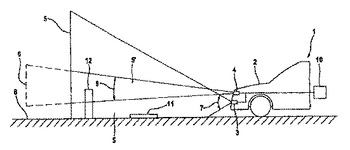 (もっと読む)
(もっと読む)
41 - 59 / 59
[ Back to top ]