
Fターム[5J070BF09]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 監視方向又は範囲 (317) | 側面又は周囲 (70)
Fターム[5J070BF09]に分類される特許
61 - 70 / 70
点滅灯内において一体にまとめられた、光学的な、側方の周辺センサーを有する自動車
【課題】 本発明は、車両の側方の周辺内における対象物を検出するための、少なくとも1つのセンサーを有する自動車であって、その際、
このセンサーが、電磁的な放射線を発信するための少なくとも1つの発信部、並びに、対象物に反射された電磁的な放射線を受信するための1つの受信部を有している様式の上記自動車に関する。
【解決手段】 本発明により、発信部15および受信部20は、側方点滅灯10内において設けられており、この側方点滅灯が、自動車の側壁に装着されており、その際、この発信部15および受信部20が、この側方点滅灯10のカバー50によって覆われている。 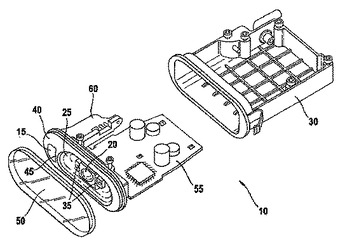 (もっと読む)
(もっと読む)
車両用後側方警報装置
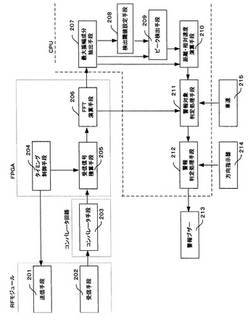
【課題】 ガードレールや壁等の路側の静止物に対しては警報せず、後方から接近する車両や自車両の死角領域に留まる車両に対しては確実に警報する車両用後側方警報装置を提供する。
【解決手段】 警報対象判定手段は、ピーク検出手段により求められたピークタイミングをもとに着目するサンプリングタイミングを設定する着目サンプリングタイミング設定手段と、着目されたサンプリングタイミングのFFT演算結果について、周波数閾値設定手段により設定された周波数閾値以上の周波数成分が存在するか否かを判定する周波数判定手段とを備え、前方接近物認識手段により、物体が自車両の前方方向から接近していると判定された場合において、周波数判定手段により周波数閾値以上の周波数成分が存在すると判定されたときに、この物体は静止物であるとして警報対象でないと判定する。
(もっと読む)
周辺監視システム

【課題】 車両など設置場所が限定され、アンテナを広範囲わたって走査させることが難
しい場合であっても、レーダ手段を増やすことなく、1つのレーダ手段で複数方向の状況
を適切に監視することができ、システムの構成を簡素化することができる周辺監視システ
ムを提供すること。
【解決手段】 アンテナ15を介して電磁波を送信するとともに反射波を受信する機能を
有するレーダ装置10と、レーダ装置10のアンテナ15と対向する位置に一方の開口端
が並設され、他方の開口端がそれぞれ所定の方向に向けて配設された導波管31〜34と
、導波管31〜34及びアンテナ前方に対して電磁波を遮蔽又は伝送可能な状態に切り替
える開閉手段26と、開閉手段26により導波管31〜34及びアンテナ前方に対する電
磁波の遮蔽又は伝送状態を切り替えながら、電磁波が伝送可能な状態にある導波管又はア
ンテナ前方に対応した電磁波の送信制御及び反射波の受信制御を行う送受信制御手段11
aとを装備する。
(もっと読む)
車両の駐車過程用の幾何学的形状データを検出するための方法
車両の駐車過程用の幾何学的形状データを検出するための方法において、車両が駐車スペースに沿って側方を走行する間、複数回に渡り、相前後し、車両と車道縁との間の側方間隔が、車両固定式で配設されている間隔センサを用いて測定される。車両縦軸線と車道縁との間の角度が次の検出により決定される、即ち、駐車スペースに沿った走行時に車両の横運動から得られる、目下の車両縦方向と規定の縦方向との間の横運動角度を検出すること、車道縁の輪郭延在態様から得られる、規定の縦方向と車道縁との間の車道縁角度を検出すること、及び、横運動角度と車道縁角度とを加算することによって目下の車両縦軸線と車道縁との間の角度を検出することである。 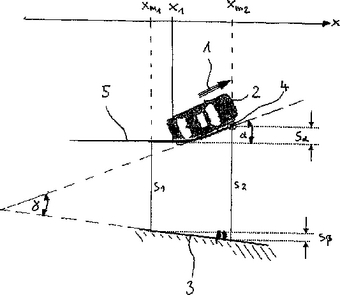 (もっと読む)
(もっと読む)
車両における対象検出方法および対象検出装置
対象検出システムを搭載した車両における対象検出方法および装置であって、対象検出システムは、電磁波を送出して検出領域内の対象で反射された波を受信し、認識された対象で反射され、付加的に車道に沿って延びる対象で反射された波を評価する。この評価は妥当性を評価するものであって、その妥当性の評価においては間接的な対象反射によって直接測定された対象反射が検証される。あるいはその前に検出された対象からもはや反射が測定できない場合に、それ以降の対象検出に間接的な対象反射を利用することにある。 (もっと読む)
駐車支援装置
【課題】超音波センサ等の距離測定手段を用いながら、駐車車両に関する測定精度を向上し、それによってより適切な駐車支援を行なうこと。
【解決手段】超音波センサ1及び車速センサ2を用いて、自車両が後退を開始するために一旦停止するまでの間に、自車両と自車両周囲の駐車車両との距離を示す検知距離データdi及び自車両の進行距離データΔXiを記憶しておく。この進行距離データΔXiから駐車車両の大きさを算出する際に、その進行距離データXiを積算した大きさよりも短くなるように、駐車車両の大きさを決定する。これにより、決定される駐車車両の大きさを、実際の駐車車両の大きさに近似させることができる。このようにして、駐車車両の大きさの測定精度を向上できるため、駐車予定領域の設定及びその駐車予定領域に駐車するための運転支援を適切に行なうことが可能になる。
(もっと読む)
車両周辺監視装置
【課題】 車両周辺の監視を廉価に行うと共に、車両周辺監視の要処理時間を短くすることができること。
【解決手段】 車両1の異なる箇所に搭載した複数台の受信器A0〜D0と、その受信器A0〜D0が受信する電磁波を出力する送信器Eとを配設し、車両1付近に検出対象が存在しない状態で、送信器Eが出力した電磁波を車両1に搭載した受信器A0〜D0で受信し、その受信電界のパターンを記憶回路に記憶させ、送信器Eが出力した電磁波を車両1に搭載した複数台の受信器A0〜D0で受信し、その受信電界のパターンを記憶回路に記憶しているパターンと比較して、車両1の周辺状態を検出する。
(もっと読む)
車両の衝突を阻止する方法および装置
車両の衝突を阻止するための方法では、まず車両2の周囲状況と車両2の運動量がセンサ2.1,2.2,2.3,2.4,2.5によって検出される。これらのセンサの出力信号から優先交通違反度と衝突危険度が導出される。優先交通違反度と衝突危険度の組合せから危険段階が検出される。それぞれ検出された危険段階に依存して最終的に衝突危険性を低減するためのステップが開始される。 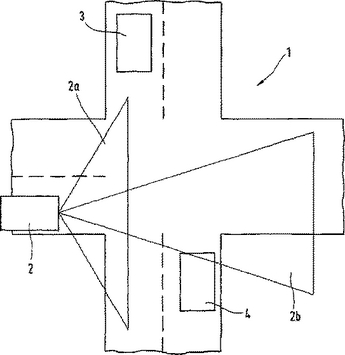 (もっと読む)
(もっと読む)
自動車用物体認識システム
本発明は、少なくとも2個の物体認識センサを備え、該センサの認識範囲が進行方向において部分的に重なる、自動車用の物体認識システムに関する。本発明によれば、第1の物体認識センサが、所定の第1垂直認識角度において、その認識範囲内で道路表面を付随的に検出し、第2の物体認識センサは、第1の物体認識センサの第1垂直認識角度未満である所定の第2垂直認識角度において、第1の物体認識センサの認識範囲内で、進行方向において道路表面を検出しない。両方の物体認識センサが物体を認識したときに限り、評価ユニットが第1の物体認識センサの認識範囲において物体の存在を推測する。 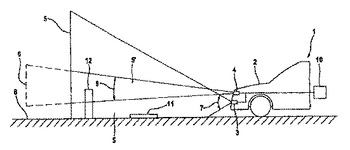 (もっと読む)
(もっと読む)
ブラインドスポットセンサシステム
本発明は、自動車の所定の監視領域内の対象を検出及び/又はクラス分けするためのブラインドスポットセンサシステムであって、少なくとも第1のレーダービームを照射する第1の手段と第2のレーダービームを照射する第2の手段を含んでいる。本発明によれば、第1のレーダービーム(ビームI)の半径方向視野が自動車の走行方向(Vx)に対して次のように傾斜されかつ第2のレーダービーム(ビームII)の半径方向視野が前記走行方向(Vx)に対して実質的に直角に次のように配向され、すなわち前記レーダービームの視野が少なくとも部分的に重なりかつ前記両ビームが共に監視領域の測量を実質的にカバーするように傾斜されて配向されており、さらに少なくとも前記第1のレーダービームがCW変調モードでもFMCW変調モードでも作動可能であるように構成されている。 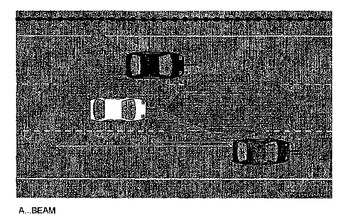 (もっと読む)
(もっと読む)
61 - 70 / 70
[ Back to top ]