
Fターム[5J070BF09]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 監視方向又は範囲 (317) | 側面又は周囲 (70)
Fターム[5J070BF09]に分類される特許
21 - 40 / 70
信号処理装置、及びレーダ装置。
【課題】 電子スキャン方式のレーダ装置においてアンテナ間隔をある程度離間させた状態であっても、方位角検出範囲を広角化する。
【解決手段】 目標物体に反射された送信信号を複数のアンテナで受信して前記アンテナごとのビート信号を生成するレーダ送受信機の信号処理装置は、前記ビート信号を合成して合成ビート信号を生成する合成手段と、前記ビート信号のいずれかと前記合成ビート信号に基づいて前記目標物体の方位角を検出する方位角検出手段とを有するので、アンテナ対の間に仮想アンテナを配置した場合にこの仮想アンテナにより得られるビート信号と同じ位相の合成ビート信号を得ることができ、ビート信号と合成ビート信号とに基づき方位角を検出することで、アンテナ間隔をある程度離間させたままで位相折り返しが発生しない方位角検出範囲を広角化できる。
(もっと読む)
物体検出装置

【課題】物体との正確な相対位置及び相対速度を検出する。
【解決手段】物体検出ECU1は、レーダセンサ2を介して、所定時間ΔT2毎に、物体の相対位置及び相対速度をそれぞれ検出する位置検出部13及び速度検出部14と、検出された相対位置を、第1線形フィルタを介して補正し、補正された相対位置である補正位置を求める位置補正部17と、求められた補正位置に基づき、第2線形フィルタを介して、補正された相対速度である補正速度を求める速度補正部18と、を備え、第1線形フィルタが、前回の前記補正速度に基づき、今回の前記補正位置を求めるフィルタであり、第2線形フィルタが、前回の前記補正速度に基づき、今回の前記補正速度を求めるフィルタであり、位置補正部17及び速度補正部18が、補正速度の初期値として、速度検出部14によって検出された相対速度を設定する。
(もっと読む)
車両移動状況検出装置および車両移動状況検出方法
【課題】 自車両の進行に関する方位と対地車速を正確に検出し物体への接近を確実に回避する。
【解決手段】複数の側方監視用レーダ装置21,22を用いて、静止物体を識別する。静止物体RM1,RM2の方位および相対速度の検出値に基づいて空間的に密集して存在する物体を静止物体RM1,RM2と判定し、該判定された静止物体を成す物体(反射点)のうち自車両から最至近に位置する物体T11,T21に関する方位および相対速度の情報に基づいて物体との接近の蓋然性を判断し、車両制御装置50にこの蓋然性低減のための信号を供給する。
(もっと読む)
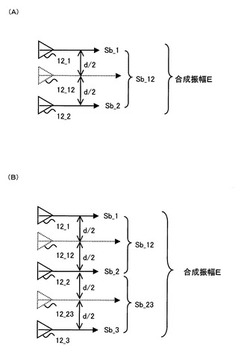
正面及び側方放射を持つレーダセンサ
自動車の周辺検出用レーダセンサであって、複数の送信アンテナにより送信信号を放射する送信手段、物体において反射される送信信号を複数の受信アンテナにより受信する受信手段、及び受信される信号を処理する信号処理手段を有するものにおいて、複数の送信アンテナ及び複数の受信アンテナがあって、平らな基板の表側及び裏側に設けられて送信又は受信を行う少なくとも1つの個別素子(以下基本放射体と称する)をそれぞれ含み、少なくとも1つの送信アンテナ及び受信アンテナがあって、平らな基板に設けられかつレーダセンサ外で基板の垂線に対して最大でも45°で傾斜するビーム円錐中心を持つ少なくとも1つの基本放射体をそれぞれ含み、少なくとも1つの送信アンテナ及び受信アンテナがあって、平らな基板に設けられかつレーダセンサ外で基板の垂線に対して45°以上で傾斜する少なくとも1つの基本放射体をそれぞれ含んでいることを特徴とする。  (もっと読む)
(もっと読む)
障害物検出装置および障害物検出システム
【課題】自車両との衝突危険度が適切に判断できるターゲット選択を行って演算負荷や通信負荷を低減することができる障害物検出装置および障害物検出システムを提供する。
【解決手段】車両の斜め方向から相対的に接近する物体を検出し、車両に対して、検出した物体の相対距離および相対速度を少なくとも算出する。そして、物体の相対距離および相対速度を用いて、当該物体が車両に衝突するまでの衝突予測時間を算出して、衝突予測時間が短い順に予め決められた数の物体を選出し、選出された物体に関する検出情報を出力する。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】プリクラッシュ安全装置用のレーダと、車線変更支援装置用のレーダとを共用できるようにする。
【解決手段】送信部11のアンテナ36は、第1の方向で、かつ第1の距離近傍の第1の範囲と、第2の方向で、かつ第2の距離近傍の第2の範囲とを含む範囲に電波を照射することにより送信信号を送信し、受信部12は、送信信号としての電波のうち、反射されてくる電波を受信して、受信した電波より受信信号を生成し、衝突予備動作用信号処理部13は、受信信号を、第1の所定時間の間でサンプリングして、物体を検出し、検出結果に応じ衝突予備動作制御部14を制御して衝突に備える動作を実行させ、車線変更警告用信号処理部15は、受信信号を、第1より長い第2の所定時間の間でサンプリングして、物体を検出し、検出結果に応じ車線変更警告動作制御部16を制御して、車線変更の危険を警告させる。本発明は、車両安全装置に適用することができる。
(もっと読む)
車載用レーダ装置、及び車載用レーダ制御方法
【課題】人体に電磁波を照射する可能性が高い場所を車両が走行している場合に、人体への電磁波照射を低減すると共に、車両が当該車両周辺の物体と衝突することを回避することができる車載用レーダ装置を提供する。
【解決手段】車載用レーダ装置であって、自車周辺に電磁波を照射する電磁波照射部と、電磁波を照射することによって自車周辺の物体から反射される反射波を受信する反射波受信部と、反射波に基づいて、自車周辺の物体を検知する電磁波物体検知部と、自車周辺の物体を補助的に検知する物体補助検知部と、所定の場所を自車が走行している状態か否かを判定する走行状態判定部と、所定の場所を自車が走行している状態であると判定したときに、電磁波物体検知部の検知方向と同じ方向の物体補助検知部の検知状態に応じて、電磁波照射部による電磁波の照射を停止、又は照射強度を弱める電磁波照射制御部とを備える。
(もっと読む)
衝突検出装置
【課題】本発明の目的は、自車の側方から接近してくる他車を効率的に検知することができる、衝突検出装置を提供する。
【解決手段】衝突検出装置は、自車前方右側の他車を検出する右側レーダと、自車前方左側の他車を検出する左側レーダと、制御部と、安全システムとを備える。制御部は、各レーダの検出結果に基づいて、自車の側方より接近してくる他車と衝突の危険があるか否か、衝突が避けられるか否かを判断する。安全システムは、制御部からの指示に従って、ドライバーに注意喚起をしたり、ブレーキ操作をアシストしたりする、安全処置を行う。また、各レーダの検出方向中心軸は、車両の直進方向に対して左右いずれかの方向に20°乃至60°の範囲内の向きに設定される。
(もっと読む)
レーダ装置、及び物標検出方法
【課題】物標のX座標の変位量が大きい場合があっても、高い確度で物標の位置の連続性が維持されるように物標の位置の推定を行う。
【解決手段】物標の位置が検出されないスキャンでは、当該物標の過去の軌跡がY軸付近の所定領域に含まれる場合は、前回の位置のX座標から、前記軌跡より推測されるX座標に第1の変位量さらに変位したX座標を有する位置を推定位置とし、前記軌跡が前記所定領域に含まれない場合は、前回の位置のX座標から、前記軌跡より推測されるX座標に第1の変位量より大きい第2の変位量さらに変位したX座標を有する位置を推定位置とする。
(もっと読む)
レーダ装置
【課題】電波の壁などからの反射により発生するゴーストを高精度に判定することができるレーダ装置を提供する。
【解決手段】レーダ装置において、反射特性判定手段は、側方の壁の反射特性を取得する。反射特性判定手段は、取得した壁の反射特性が所定の閾値以上であるか否かを判定する。仮想壁設定手段は、取得した壁の反射特性が所定の閾値以上である場合に、検出したターゲットの側方に仮想壁を設定する。対称位置判定手段は、仮想壁を側方に設定したターゲットに対して、仮想壁と対称な位置にターゲットがあるか否かを判定する。速度判定手段は、仮想壁と対称な位置にターゲットがあった場合に、仮想壁と対称な位置にあるターゲットの速度が、所定の範囲内にあるか否かを判定する。ゴースト判定手段は、仮想壁と対称な位置にあるターゲットの速度が所定の範囲内にある場合に、仮想壁と対称な位置にあるターゲットをゴーストと判定する。
(もっと読む)
物体検出装置
【課題】検出信号のピーク値を的確に検出して適切な物体検出が行える物体検出装置を提供すること。
【解決手段】電波を送信し物体で反射した受信波を送信波とミキシングして検出信号を出力し、その検出信号において物体に対応したピーク値を検出する際に、ピーク値の検出予測位置に所定範囲の探索領域を設定し(S10)、その探索領域においてピーク値を検出し(S12)、その探索領域にピーク値を検出できない場合に検出信号の信号値の増加する側に探索領域をシフトさせてピーク値の検出を行う(S12〜S16)。これにより、探索領域を大きくすることなく広い範囲でピーク検出が可能となり、確実なピーク検出が行え、物体の検出精度の向上が図れる。
(もっと読む)
レーダ装置、物体検出方法、及び車両
【課題】車載レーダ装置を用いて車両の制御を行う場合、データ処理を早く行うため物体検出範囲を適切に制御する必要がある。従来はビーム出射強度を調整していたが、ビームの強度は距離に応じて徐々に減衰するため、物体の検出範囲を適切に設定することは困難であった。また、広角近距離用と狭角遠距離用のレーダ装置を使い分ける方法では、2つのレーダ装置を設置しなければならないという問題があった。装置を複雑化せずに検出範囲を適切に設定できる方法を提供する。
【解決手段】物体に向けてビームを出射する手段と、前記物体からの反射波を受信する手段と、車両の走行状況に応じて物体検出範囲を設定する手段と、前記受信信号と前記物体検出範囲の情報とに基づいて物体を検出する手段とを有するレーダ装置により、容易に検出範囲を制限できるので処理負荷が軽減され、データ処理速度を改善できる。
(もっと読む)
車両ホイール用ループアンテナおよびそれを用いた車両側方認識装置
【課題】走行状態に依存することなく、車両側方の監視領域を有効に確保する。
【解決手段】ループアンテナ4は、車両のホイール形状に合わせて、ホイール2の略全周にわたってリング状に延在している。
(もっと読む)
レーダ装置、及びその信号処理方法
【課題】窓関数に起因して周波数差信号のサンプリングデータに含まれる低周波成分を効果的に除去する。
【解決手段】送信信号と受信信号との周波数差に対応する周波数差信号の周波数に基づき物標の距離を求めるレーダ装置において、周波数差信号を所定のサンプリング区間でサンプリングして第1のサンプリングデータを生成するサンプリングデータ生成手段と、第1のサンプリングデータを処理して周波数差信号の周波数検出用データを求める周波数検出用データ算出手段とを有する。そして、周波数検出用データ算出手段によれば、第1のサンプリングデータに対し、サンプリング区間の中央付近に端部より大きい重み付けをする窓関数処理をして求められる第2のサンプリングデータから、当該第2のサンプリングデータの平均に前記窓関数処理をした除去成分が除去されるので、低周波成分を効果的に抑圧できる。
(もっと読む)
表示制御装置、方法およびプログラム
【課題】ドライバーが周囲に存在する物体の状況を認知しやすい表示制御装置を提供する。
【解決手段】車両周囲を撮像する撮像部と、音波、電波、またはレーザを照射し反射波を受信することにより、あるいは、上記撮像部からの撮像画像を処理することにより、周囲の障害物の有無、あるいは、距離や方向を検知する物体検知センサと、物体検知センサの制御値を設定し検知領域を所定の条件に応じて変化させる検知領域判断部と、検知領域判断部の制御値に基づき決定される物体検知センサの検知領域を車両周囲を撮像した撮像画像に重畳して表示させ、運転者に検知領域の情報を提供する表示制御部とを備える構成とする。
(もっと読む)
対象物検出装置
【課題】シングルビーム方式のレーダ装置を用いて車両の周囲に位置する対象物が存在するレーン位置を特定する対象物検出装置を提供する。
【解決手段】検出範囲にある対象物までの距離のみを検出可能なシングルビーム方式の右方レーダ装置4及び左方レーダ装置5を備え、各レーダ装置4、5のパラメータ情報と、車両2の現在位置情報と、車両2が走行する道路の道路形状情報とに基づいて、各レーダ装置4、5により特定のレーン内に位置する対象物を検出可能な対象物存在範囲70、71を算出し、検出した対象物までの距離に基づいて対象物のレーン位置を特定するように構成する。
(もっと読む)
パルスレーダ装置
【課題】送受信用でアンテナを共用化したパルスレーダ装置において、デュプレクサを必須の構成要件とすることなく、受信パルスの分離・識別を可能にすることである。
【解決手段】このパルスレーダ装置は、伝送線路1に接続された送信回路4と、伝送線路2を接続された受信回路5と、伝送線路1と伝送線路2との接続部位aに接続された伝送線路3に接続された送受信共用のアンテナ6と、伝送線路3上に設けられた遅延器7とを有する。送信回路4によって生成された送信パルスは、伝送線路3上の遅延器7による信号遅延を経て、アンテナ6より外部に放射される。アンテナ6によって受信された受信パルスは、伝送線路3上の遅延器7による信号遅延を経て、受信回路5に入力される。
(もっと読む)
物体検出装置、および車車間通信システム
【課題】車両の周囲に存在する物体を検出する物体検出装置において、路側物と二輪車等の車両とを精度よく識別できるようにする。
【解決手段】支援制御ECUは、車両検出処理において、複数のサイドカメラによる撮像画像に基づく画像処理と、複数のソナーによる検出タイミングの差分とによって検出した物体の各移動速度を比較することにより、物体が車両であるか否かを判定する。即ち、別々に検出した物体の移動速度を比較することによって、物体の移動速度を高精度に求め、この物体の移動速度に基づいて物体が車両であるか路側物であるかを識別できるようにしている。従って、路側物の形状が車両の形状と似ている場合であっても、この物体が路側物であるか車両であるかを誤判定することなく精度よく識別することができる。
(もっと読む)
車両用周辺監視装置
【課題】車両の衝突の回避又は軽減を図るために、車両の前方及び前側方の物体を監視する車両用周辺監視装置を提供することを課題とする。
【解決手段】
車両用周辺監視装置は、車両の前方で物体を検知する前方監視レーダ110、車両の左前側方で物体を検知する左前側方監視レーダ120、車両の右前側方で物体を検知する右前側方監視レーダ130、自車両の進行方向を検知する進行方向判定部143、及び、監視部144を備える。監視部144は、静止物体については、前方監視レーダ110、左前側方監視レーダ120及び右前側方監視レーダ130のうち、進行方向判定部143によって検知された自車両の進行方向に検知範囲を有する監視レーダのみで監視し、移動物体については、自車両の進行方向に応じて、前方監視レーダ110、左前側方監視レーダ120及び右前側方監視レーダ130に優先順位をつけて監視する。
(もっと読む)
車両用周辺監視装置
【課題】障害物等の不要な誤検出を抑制することが可能な車両用周辺監視装置を提供すること。
【解決手段】自車両前方に延在する所定前方領域内の障害物を監視する前方監視手段と、所定前方領域に比して自車両の側方側に延在する所定前側方領域内の障害物を監視する前側方監視手段と、を備える車両用周辺監視装置であって、自車両が側壁を有する所定道路を走行しているか否かを判定する所定道路走行判定手段を備え、所定道路走行判定手段により所定道路を走行していると判定された場合には、前側方監視手段による監視を抑制することを特徴とする。
(もっと読む)
21 - 40 / 70
[ Back to top ]