
Fターム[5J070BF09]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 監視方向又は範囲 (317) | 側面又は周囲 (70)
Fターム[5J070BF09]に分類される特許
41 - 60 / 70
車両用周辺監視装置

【課題】車両の衝突の回避又は軽減を図るために、車両の前方及び前側方の物体を監視する車両用周辺監視装置を提供することを課題とする。
【解決手段】
車両用周辺監視装置は、車両の前方で物体を検知する前方監視レーダ110、車両の左前側方で物体を検知する左前側方監視レーダ120、車両の右前側方で物体を検知する右前側方監視レーダ130、自車両の進行方向を検知する進行方向判定部143、及び、監視部144を備える。監視部144は、静止物体については、前方監視レーダ110、左前側方監視レーダ120及び右前側方監視レーダ130のうち、進行方向判定部143によって検知された自車両の進行方向に検知範囲を有する監視レーダのみで監視し、移動物体については、自車両の進行方向に応じて、前方監視レーダ110、左前側方監視レーダ120及び右前側方監視レーダ130に優先順位をつけて監視する。
(もっと読む)
車両用周辺監視装置

【課題】障害物等の不要な誤検出を抑制することが可能な車両用周辺監視装置を提供すること。
【解決手段】自車両前方に延在する所定前方領域内の障害物を監視する前方監視手段と、所定前方領域に比して自車両の側方側に延在する所定前側方領域内の障害物を監視する前側方監視手段と、を備える車両用周辺監視装置であって、自車両が側壁を有する所定道路を走行しているか否かを判定する所定道路走行判定手段を備え、所定道路走行判定手段により所定道路を走行していると判定された場合には、前側方監視手段による監視を抑制することを特徴とする。
(もっと読む)
周辺監視装置
【課題】死角領域を短時間で脱して運転者が直接視認できる領域に移動する他車についての報知を抑制する「周辺監視装置」を提供する。
【解決手段】自動二輪車200が自車後方にいるときの相対速度Vfが、自動二輪車200が、ブラインドスポット101を所定の時間以下で自車100の前方に駆け抜けてしまうことを示している場合には(a)、自動二輪車200がブラインドスポット101内に位置している期間中であっても(b)、他ブラインドスポッ101ト内に他車が存在することの警告は表示しない。他の場合には、自動二輪車200がブラインドスポット101内に位置している期間中、ブラインドスポット101内に他車が存在することの警告を表示する。
(もっと読む)
物体検出装置、物体検出方法、およびコンピュータが実行するためのプログラム
【課題】物体の方位角に拘わらず、高精度に停止物体を判定することが可能な物体検出装置、物体検出方法、およびコンピュータが実行するためのプログラムを提供することを目的とする。
【解決手段】本発明に係る物体検出装置は、信号波を送信し、この送信した信号波の反射波に基づいて、自車両と物体との相対速度を取得する第1の相対速度取得手段と、物体の方位角を取得する方位角取得手段と、自車速度を検出する自車速度検出手段と、相対速度の方位角依存性を考慮して、前記自車速度検出手段で取得した自車速度、前記第1の相対速度取得手段で取得した相対速度、および方位角取得手段で取得した方位角に基づいて、前記物体が静止物であるか否かを判定する第1の静止物判定手段と、を備えている。
(もっと読む)
障害物検知システム
【課題】複数のレーダ装置を備えた車両において電波干渉が生じた場合、送信周波数等を変更して電波干渉を回避しなくてはならない。本発明は、各レーダ装置の送信周波数等の情報を共有化することにより、送信周波数等の変更後に、再び他レーダ装置との電波干渉を引き起こさないようなレーダ装置を提供する。
【解決手段】近接した複数のレーダ装置が、通信を介してお互いの変調態様情報を共有することにより、外界からの電波干渉時でも共有相手に対する電波干渉が発生しないようにする。
(もっと読む)
車載レーダ装置
【課題】精度良く他車の検出を行う「車載レーダ装置」を提供する。
【解決手段】x方向に並べて配置した二つのアンテナA、Bを用いて計測される他車の相対距離DAとDBとの一方に変化が生じなくなったならば、他車のy方向座標として、前回他車について検出したy座標y(-1)を設定する(b、c、d)。他車のx座標としては、相対距離DAとDBとのうちの一方に変化が生じている場合には、変化生じている相対距離を半径とし、当該相対距離を計測したアンテナ101を中心とする円弧上の、y座標がy(-1)となる位置のx座標を設定する(b,d)。ここで、x方向を前後方向として他車が平行移動する場合、他車がy方向正面にあるアンテナ101では、相対距離の変化が観測されなくなる。
(もっと読む)
レーダー装置
【課題】移動体に搭載され、送信波を送信し、反射波を受信して、物体を検出する車載レーダー装置に関し、他のレーダー装置の送信波との干渉を防止する。
【解決手段】共通の時刻に関する無線信号を受信する受信部30を設け、制御部20が、時分割で割り付けられた、レーダーセンサ10と、レーダーセンサ10以外の前記電磁波を送信する他のレーダーセンサ12,14,16との送信期間の内、受信した時刻に関する無線信号に応じて、割り当てられた送信期間に、レーダーセンサから前記電磁波を送信する。このため、移動体搭載レーダーであっても、時分割制御で、電波干渉を防止でき、正確なレーダー検知が可能となる。
(もっと読む)
レーダ探知を検証するためのシステムおよび方法
【課題】車両に近接する他の車両および物体を探知するように適合された車両レーダシステムを提供する。特にサイドミラー、リアミラーで見ることの出来ない領域の車両を探知して警報を出力する。
【解決手段】レーダ探知を検証するためのシステムおよび方法は、車両の側方を複数の受信ビームでカバーし、複数の受信ビームの各々が合成信号を受信し、探知を示す第1と第2の状態値から1つの状態値を選択し、選択された探知状態値に関連して肯定検証、否定検証を行い、否定検証に応答して第2の状態値をセットして検証を行う処理を各受信ビームについて実施して探知テーブルを作成し、探知テーブル内の探知状態値と、探知範囲値とを処理して、検証済み探知状態値を生成するようになっている。
(もっと読む)
車両周辺監視装置
【課題】 ドアを開閉させても周辺の監視を行えるようにする。
【解決手段】 車両周辺監視装置1は、ドアミラーに配置された複数の検知部4,5,7,8と、制御ユニット9とを有し、ドアスイッチ12,13でドアが開いたことを検知したら、モータ駆動回路14,15を駆動させて開閉したドアのドアミラーの電動格納装置を駆動させ、ドアミラーをドアに対して回動させて、それぞれの検知部4,5,7,8のそれぞれの撮像エリア及び検知エリアがドアの開閉の前後で変化しないようにする。
(もっと読む)
車載用ナビゲーション装置
【課題】平行道路を走行している場合でも自車の走行状態を高精度で検知可能とし、経路案内の正確さ及び信頼性の向上に寄与することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】地図データを格納した手段と、自車位置を検出する手段と、自車の向きに対し横方向を含む面内で少なくとも上方向及び斜め上方向に向けて信号を発信し、発信信号に対する対象物からの反射信号を受信したときに当該対象物までの距離を検出する手段とを備えた車載用ナビゲーション装置において、検出された自車位置と地図データを参照して(S1)、検出された当該対象物までの距離を指示する信号の強度の変化に応じて(S2,S3,S6)、自車の走行状態を検知する(S4,S7,S8)。
(もっと読む)
物体検知装置
【課題】 簡単な構成で二つの方向を同時に検知することが可能な物体検知装置を提供する。
【解決手段】 レーダ送受信部12から送信された電磁波Poutは、半透過板13で一部が透過されて透過波Ptとなり、残りが反射されて反射波Prとなる。透過波Ptまたは反射波Prが物体により反射されると、反射された電磁波は半透過板13を介してレーダ送受信部12で受信される。物体検知部11は、この受信した電磁波Pinと送信された電磁波Poutとに信号処理を行い、透過波Ptまたは反射波Prを反射した物体までの相対距離あるいは相対速度を算出する。
(もっと読む)
物体検出装置
【課題】 本発明の目的は、オンラインで正確に距離相当量を補正することの可能な物体検出装置を提供すること。
【解決手段】 本発明の発明は、物体までの距離相当量(距離自体や、ステレオカメラでの視差など)を検出する車載の物体検出装置において、物体までの距離相当量を検出する第一検出手段2R,2Lと、物体までの距離相当量を第一検出手段2R,2Lとは異なる検出原理で検出する第二検出手段3と、第一検出手段2R,2Lと第二検出手段3が、同一物体を検出したか否かを判断する判断手段4と、同一の物体を検出したと判断した場合に、第二検出手段3が検出した距離相当量を、第一検出手段2R,2Lが検出した距離相当量の検出誤差の評価に用いるか否かを判定する判定手段4とを備えることを特徴としている。
(もっと読む)
レーダ装置およびその指向性制御方法
【課題】 車両周辺監視用レーダ装置において、大型化を招くことなく簡単な構成で指向性を変化可能とする。
【解決手段】 アレイアンテナ部2で送受する送信、受信信号をRF回路部3で処理し、遅延時間差に基づいて信号処理部4の距離計測部22が距離を算出する。電磁波放射部18は所定の固定経路差でそれぞれ送信信号給電線に結合された複数のアンテナ素子からなり、スイッチ回路17が励振すべきアンテナ素子数を切り替える。送信周波数制御部23により送信周波数を変化させると検知方位が変化し、アレイ数制御部24によりスイッチ回路を制御してアンテナ素子数を変化させると検知幅が変化して指向性が変化する。検知エリア設定部26が走行環境等に基づいて必要な検知エリアを設定して送信周波数制御部23とアレイ数制御部24に指示することにより、自動的に電磁波放射部の指向性が変化される。
(もっと読む)
車両周辺物体探知装置
【課題】 車両前方を探知範囲とするレーダ装置を用いて、信号機が設置された位置において近づいてくる物体を検出することができる「車両周辺物体探知装置」を提供すること。
【解決手段】 車両前部に設置されて探知範囲が変更可能なレーダ装置10と、車両前方に設置された信号機を検出するカメラ20、信号機検出部22と、信号機検出部22によって信号機が検出されたときに、レーダ装置10の探知範囲を車両の進行方向に対して横方向に広げる探知範囲変更指示部24と、探知範囲変更指示部24によって探知範囲が横方向に広げられたレーダ装置10によって車両周辺の移動物体が探知されたときに、この探知結果に対する所定の応答処理を行う警報出力部30、画像記録指示部40、シートベルト制御部50とが備わっている。
(もっと読む)
車両用物体検出装置
【課題】 アレーアンテナを用いて高精度に物体を検出できる領域が拡張された車両用物体検出装置を提供すること。
【解決手段】 車両に搭載され、自車両周辺の物体(移動体又は停止物)を検出する車両用物体検出装置に、第一の領域においては第一の精度で物体を検出し、第一の領域とは異なる第二の領域においては第一の精度よりも低い第二の精度で物体を検出する1以上の検出器から成る物体検出手段と、物体検出手段により第一の領域内の複数の場所でそれぞれ検出された複数の物体相対位置に基づいて物体のその後の相対移動軌跡を推定する軌跡推定手段と、物体検出手段により第二の領域内で検出された物体相対位置と軌跡推定手段により推定された物体の推定相対移動軌跡とが重なったとき、第二の領域内で検出された物体相対位置を第二の精度より高い第三の精度で検出されたものとみなす精度補正手段とを備える。第三の精度は、例えば、第一の精度と等しい。
(もっと読む)
物体認識装置及び方法
【課題】 少ない演算量で、被検出対象のデータが混在しても安定して物体の形状を認識することができる物体認識方法、及びこの方法を用いた物体認識装置を提供する。
【解決手段】 移動体周辺に存在する物体を認識する物体認識装置であって、物体の表面形状情報を検出する物体検出手段1と、物体の輪郭形状を認識する形状認識手段2と、を備え、この形状認識手段2は、表面形状情報を構成する標本群から任意に抽出した標本に基づいて定めた形状モデルに対する標本群の一致度を演算して前記輪郭形状を認識する。
(もっと読む)
少なくとも1つの側方および後方の周辺状況捕捉装置を有する自動車用の危険検知システム
本発明は、少なくとも1つの、側方および後方の周辺状況捕捉装置を有する、自動車用の危険検知システムに関する。本発明は、少なくとも1つの、側方および後方の周辺状況捕捉装置、周辺状況解釈装置および運転者反応支援装置を有する、自動車用の危険検知システムであって、周辺状況捕捉装置が、本危険検知システムを搭載した自動車に対して相対移動する移動対象物を捉えるシステムに関する。この危険検知システムは走行方向に逆向きに配置されている2つのセンサを有している。このシステムはデータの算出用として、センサ毎に少なくとも1つの評価および解釈ユニットを有している。 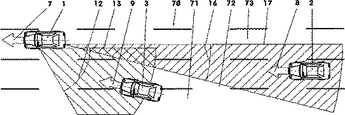 (もっと読む)
(もっと読む)
車両用制御対象判定装置
【課題】 隣車線から自車線に侵入して制御対象となる他車両を的確に判定できるようにする。
【解決手段】 レーダー装置14により検知された物体が自車の走行軌跡に接近する横方向相対速度を横方向相対速度検出手段M2で検出するとともに、前記物体が自車に接近する進行方向相対速度を進行方向相対速度検出手段M3で検出し、物体を制御対象と判定するための確定度を算出する確定度算出条件を、確定度算出手段M4が横方向相対速度および進行方向相対速度に基づいて変更するので、隣車線の他車両が自車線に割り込もうとして横方向相対速度および進行方向相対速度が変化したときに確定度を変化させることで、制御対象判定手段M5が前記他車両を制御対象の候補として認識し易くし、自車線に割り込もうとする他車両を制御対象として判定する精度を高めることができる。
(もっと読む)
他車両検出機および他車両検出方法
【課題】 他車両を的確にかつ安定的に検出することができ、ひいては、交通事故の発生率を低減することができる「他車両検出機および他車両検出方法」を提供する。
【解決手段】 検出装置2によって検出された検出点が、一群の検出点群をなす場合には、当該検出点群を包囲する判定用仮想窓を設定するように形成され、かつ、この判定用仮想窓に対する前記検出点群の移動状態に基づいて、前記検出点群に対応する被検出物が1台の車両であるらしいか否かを判定するように形成された判定装置3を備えたこと。
(もっと読む)
点滅灯内において一体にまとめられた、光学的な、側方の周辺センサーを有する自動車
【課題】 本発明は、車両の側方の周辺内における対象物を検出するための、少なくとも1つのセンサーを有する自動車であって、その際、
このセンサーが、電磁的な放射線を発信するための少なくとも1つの発信部、並びに、対象物に反射された電磁的な放射線を受信するための1つの受信部を有している様式の上記自動車に関する。
【解決手段】 本発明により、発信部15および受信部20は、側方点滅灯10内において設けられており、この側方点滅灯が、自動車の側壁に装着されており、その際、この発信部15および受信部20が、この側方点滅灯10のカバー50によって覆われている。 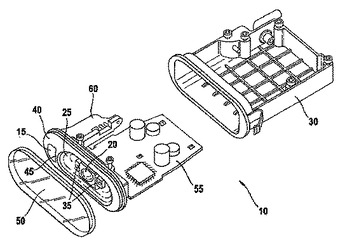 (もっと読む)
(もっと読む)
41 - 60 / 70
[ Back to top ]