
Fターム[5J070BF12]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 警報 (149)
Fターム[5J070BF12]に分類される特許
81 - 100 / 149
車載用レーダ装置
【課題】本発明は、他車のレーダ装置による認識され易さ(被認識性或いは視認性)を向上させ、上記のような状況においても、他車のレーダ装置が自車両の存在を検出しやすくすることを目的とする。
【解決手段】送信手段から送信波を出力することによりターゲットから反射されてくる反射波を受信手段が受信し、反射波に基づいてターゲットとの距離や相対速度を検出する車載用レーダ装置において、他レーダ装置から送信された送信波を受信する手段と、当該受信波を自レーダから送信する手段を備えている構成とする。
(もっと読む)
レーダ装置

【課題】物体までの距離や物体とレーダ装置との相対速度が変化する環境においても、波数推定を正確に行うレーダ装置を提供する。
【解決手段】電波を送信する送信部と、電波を受けた物体から反射される電波を受信する複数のアンテナと、複数のアンテナから供給される受信信号に応じて、物体に反射される電波の反射波強度の角度スペクトラムを算出し、角度スペクトラムにおいて設定される閾値を越える部分をカウントすることにより到来する電波の波数を推定し、推定された波数と複数のアンテナから供給される受信信号とに応じて、測角方法を用いて物体の存在する方向を判定する信号処理部とを有するレーダ装置であって、信号処理部は、複数のアンテナから供給される受信信号に応じて、電波を反射する物体までの距離を算出し、算出された距離に応じて閾値を設定する。
(もっと読む)
車両制御装置
【課題】 自車の走行の障害とならない停止物を対象とする不必要な車両制御が行われるのを防止する。
【解決手段】 レーダー装置で検知した先行車との車間距離が所定値以下になると自動制動を行ったり運転者に警報を発したりして衝突の発生を防止するものにおいて、先行車のような移動物を検知するためのレーダー装置の反射波の受信レベルの閾値(実線で示す移動物用検知閾値)に対し、停止物を検知するための反射波の受信レベルの閾値(破線で示す停止物用検知閾値)を所定の領域で高く設定する。これにより、自車の障害とならないゲートや路上落下物を検知して障害物であると誤認するのを防止し、ゲートや路上落下物に対して必要のない自動制動や警報が行われるのを防止することができる。
(もっと読む)
レーダ装置、及び、到来方向推定装置
【課題】物体の方向決定を、物体が一つの構成要素で構成されている可能性の高い場合は迅速に、物体が複数の構成要素で構成されている可能性の高い場合は正確に行うレーダ装置を提供する。
【解決手段】電波を物体に送信する送信部と、物体に反射される電波を受信する複数のアンテナと、複数の受信信号に基づいて、物体に反射される電波の到来方向を推定する測角方法を用いる信号処理部とを有するレーダ装置であって、信号処理部は、第一の測角方法を用いて物体からの電波の到来方向を推定し、推定された電波の角度分布に基づいて物体の幅を算出し、算出された物体の幅が所定の幅以上であるかを判定し、物体の幅が所定の幅以上である場合に、第一の測角方法より角度分解能の高い第二の測角方法を用いて物体からの前記電波の方向を推定する。
(もっと読む)
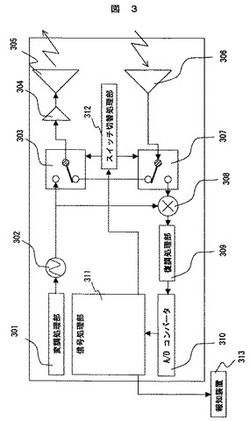
電子走査式レーダ装置
【課題】簡単な構成で、送受信モジュールの故障を検出可能な電子走査式レーダ装置を提供する。
【解決手段】送受切替器3cにおける漏洩送信パルス信号を選択的に導出可能な切替器7と、漏洩送信パルス信号の信号レベルを検出可能なレベル検出部(検出器)8と、検出された漏洩送信パルス信号の信号レベルと、予め設定された許容基準値とを比較する異常検出部10とを設けたので、簡単な構成で、送受信モジュール3の故障の有無を容易に検出ができる。
(もっと読む)
レーダ計測システム
【課題】レーダ装置を用いて移動体の角速度を算出する「レーダ計測システム」を提供する。
【解決手段】レーダ装置で検出した、同一物体上の点である可能性が認められる程度に近接している二つの検出点a、bの、地面に対する速度ベクトルva、vbを求め、検出点aの位置paを通り速度ベクトルvaと垂直な直線と、検出点bの位置pbを通り速度ベクトルvbと垂直な直線との交点を仮想中心点Oとし、位置paから速度ベクトルvaで単位時間進んだ相対位置qaと、位置pbから速度ベクトルvbで単位時間進んだ相対位置qbを求め、pa-O-qaの角度θaを検出点aの角速度、pb-O-qbの角度θbを検出点bの角速度として求める。そして、両角速度が近似していれば、強検出点に、bに、求めた二つの角速度の平均値を角速度として設定する。
(もっと読む)
レーダ計測システム
【課題】レーダ装置を用いて移動体の相対速度ベクトルを精度良く算出する「レーダ計測システム」を提供する。
【解決手段】左レーダ装置1が計測した相対位置PLと、右レーダ装置2が計測した相対位置PRが所定レベル以上近接する場合、両相対位置を同じ点に対して計測された相対位置とみなす。そして、PLの遠近方向相対ベクトルをuL、PRの遠近方向相対ベクトルをuRとして(a)、PLからuL進んだ位置を通る、uLと垂直な直線LBLと、PRからuR進んだ位置を通る、uRと垂直な直線LBRとを求め、点QLから見た点QRの位置ベクトルが、PLから見たPRの位置ベクトルΔPと等しくなるように、直線LBL上の点QLと直線LBR上の点QRとを求め、単位時間にPLからQLまで進む速度ベクトルuを、PL及びPRが計測された点の相対速度ベクトルとする。
(もっと読む)
物体検知装置および方法
【課題】単一の距離センサのみで簡易な構成および効率的な処理によって、測距領域に侵入した検知物体の種類の正確な検出を行なうことができる物体検知装置および方法を提供すること。
【解決手段】警備装置100において、測距領域における物体を検知する測距センサ101と、検知された検知物体までの距離を算出するセンサ制御部102と、検知物体までの距離に基づいて検知物体の高さを算出する物体高算出部103と、検知物体の高さと測距領域における検知物体の幅とに基づいて検知物体の断面積を算出する断面積算出部104と、検知物体の断面積に基づいて検知物体の種類を判断する物体判断部105とを備えた。
(もっと読む)
物体検知装置
【課題】レーダ装置を用いて先行車などの物体を検知すると共に、より簡易な構成で虚像を実際の物体(実像)と誤認するのを防止する物体検知装置を提供する。
【解決手段】検知された第1の物体(物体104)と車両(自車)10の間に第2の物体(物体102)が検知されると共に、検知された第1の物体の相対距離r1+r2が検知された第2の物体の相対距離r1の整数倍(例えば2倍)であり、車両の移動速度v1,v1’と検知された第1の物体の移動速度(相対速度)v2,v2’が等しく、かつ検知された第1の物体の相対角度が同一(θ1=θ2)であるとき、検知された第1の物体は虚像であると判定する。
(もっと読む)
建設現場における移動体の位置特定システム及び方法
【課題】建設現場において移動体に取り付けられたICタグの位置を精度良く特定することができるようにする。
【解決手段】固有のタグIDが記憶された複数のICタグ21が、建設現場1の固定位置に配置されるとともに、ICタグ22が移動体にも取り付けられる。リーダ装置30は、移動タグ(22)からタグIDを読み取るとともに、固定タグ(21)からタグIDを読み取り、読み取ったタグIDを管理装置10に送信する。管理装置10は、リーダ装置からタグIDを受信し、受信したタグIDのうち、固定タグであるタグIDに対応する位置情報を固定タグ情報データベース152から読み出し、読み出した位置情報に基づいて、建設現場1において移動タグが位置しうる領域を特定する。
(もっと読む)
空港用気象レーダ装置とその運用方法
【課題】 航空機の安全を考慮した最適なシーケンスで観測高度を切り替える運用を実現する。
【解決手段】 通信部1において、空港監視レーダから航空機位置情報を取得し、取得した位置情報から着陸機の情報のみを抽出して、着陸時間帯予測部12にて、その航空機位置情報から着陸行動時間帯を予測する。レーダ制御部13では、予測した着陸行動時間帯から着陸態勢に入る直前に低仰角走査モードとなるようにアンテナ走査の最適シーケンスを決定し、この最適シーケンスで気象ドップラーレーダ部14を制御する。観測結果判定部15では、レーダ部14の観測情報を取得して異常気象を判定する。この判定において、ダウンバーストのような危険な異常気象を判別した場合には、着陸態勢に入る航空機に対して警告を発する。
(もっと読む)
物体検出装置
【課題】高反射率体の近傍に低反射率体が存在する場合でも、これら2つの物体を確実に検出することができる物体検出装置を提供する。
【解決手段】レーザレーダ装置7は、得られた受信波から物体の位置および距離を検知するとともに、受光量が閾値Ethよりも高い物体を検出して、高反射率体位置データを生成し、画像処理装置8に送信する(S101〜S107)。画像処理装置8は、画像データに高反射率体の位置をマッピングし、当該位置を中心とする所定領域を、局部画像領域に設定する(S201〜S203)。画像処理装置8は、局部画像処理領域にて低反射率体を検出するパターンマッチング処理を行う(S204)。そして、画像処理装置8は、検出した低反射率体と高反射率体の個体識別を行う(S205〜S208)。
(もっと読む)
車載用レーダ装置
【課題】前回の物標データと今回の物標データとの連続性を判定して物標データのペアリングを行い、正確に物標を捕捉できる車載用レーダ装置を提供する。
【解決手段】車載用の周波数変調連続波(FM−CW)レーダ装置であって、検出した過去の物標データと今回の物標データとの連続性の判定を、物標との距離差、相対速度差、及び横位置差の条件で行う連続性判定手段を有する車載用レーダ装置において、連続性判定手段が物標の連続性を判定する際に、物標との距離差と相対速度差の判定条件に加えて、前回と今回の物標が横位置差を満足するか、或いは、角度差を満足する条件から連続性を判断するようにさせた車載用レーダ装置である。この場合、物標までの距離が、所定値未満の場合には横位置差で物標の連続性を判定し、所定値以上の場合には角度差で連続性を判定するようにしても良い。
(もっと読む)
無線通信装置およびその盗難防止方法
【課題】盗難防止装置の取り付け作業が不要となり、顧客の邪魔にならず、かつ、美観を損ねないような盗難防止技術を提供する。
【解決手段】無線通信装置は、データ通信手段と測距手段とを備えた無線通信部と、測距手段により測定された無線通信装置から特定の位置までの距離が盗難警告の出力条件を満たすと盗難警告を出力する警告出力部とを含む。
(もっと読む)
電波探知装置
【課題】警報受信機能を有する電波逆探知装置において、監視受信モード(目標捜索)の受信タイムスケジュールに影響を及ぼすことなく、警報識別の確実性を向上させることを目的とする。
【解決手段】受信したレーダ波の周波数、パルス幅、パルス繰返し間隔の諸元を検出し、これを予め蓄えておいたレーダ波の諸元データに基いて合致判定を行い、識別候補中に警報対象目標を含んでいる場合には、警報受信スケジュールを変更すると共に、自機へのロックオン有無を判別して、再度、警報対象か否かの合致判定を行うようにしたものである。
(もっと読む)
物体検出装置
【課題】撮像手段による瞬間的に不安定な検出結果によりフュージョン物標の大きさ情報を適正に取得できない場合であっても、その影響を極力受けることなくフュージョン物標を更新すること。
【解決手段】生成されたフュージョン物標FPの更新時に、レーダ物標MPは検出できたが、撮像手段では瞬間的な画像ロストを生じて大きさ情報を適正に取得できなくても、撮像手段の検出結果に誤りがあり前回の検出物体が存在すると推定して、大きさ情報が過去に取得した該フュージョン物標FPの大きさ情報に基づく推定により補間された補間画像物標LIP1〜LIP4を用いて画像ロストフュージョン物標LFP1〜LFP4を生成してフュージョン物標FPを更新する。
(もっと読む)
車載警報音発生装置および方法
【課題】運転者が警報音から警報内容を的確に把握することを可能とする車載警報音発生装置を提供すること。
【解決手段】警報対象の状態を検出する各種のセンサー(111〜120)と、センサーの検出結果に応じて警報音の発音を指示する発音制御部(101)と、発音制御部の指示に従い警報音を発音する音源システム(102)とを具備し、発音制御部は、警報音として、センサーの検出結果が警報を要する第1状態値に達したときに開始音の発音を指示し、該開始音の発音後に、センサーの検出結果に応じて態様が変化する経過音の発音を指示し、センサーの検出結果が警報を要しない第2状態値に達したときに終了音の発音を指示する。
(もっと読む)
レーダー装置
【課題】移動体に搭載され、送信波を送信し、反射波を受信して、物体を検出する車載レーダー装置に関し、他のレーダー装置の送信波との干渉を防止する。
【解決手段】共通の時刻に関する無線信号を受信する受信部30を設け、制御部20が、時分割で割り付けられた、レーダーセンサ10と、レーダーセンサ10以外の前記電磁波を送信する他のレーダーセンサ12,14,16との送信期間の内、受信した時刻に関する無線信号に応じて、割り当てられた送信期間に、レーダーセンサから前記電磁波を送信する。このため、移動体搭載レーダーであっても、時分割制御で、電波干渉を防止でき、正確なレーダー検知が可能となる。
(もっと読む)
レーダ探知を検証するためのシステムおよび方法
【課題】車両に近接する他の車両および物体を探知するように適合された車両レーダシステムを提供する。特にサイドミラー、リアミラーで見ることの出来ない領域の車両を探知して警報を出力する。
【解決手段】レーダ探知を検証するためのシステムおよび方法は、車両の側方を複数の受信ビームでカバーし、複数の受信ビームの各々が合成信号を受信し、探知を示す第1と第2の状態値から1つの状態値を選択し、選択された探知状態値に関連して肯定検証、否定検証を行い、否定検証に応答して第2の状態値をセットして検証を行う処理を各受信ビームについて実施して探知テーブルを作成し、探知テーブル内の探知状態値と、探知範囲値とを処理して、検証済み探知状態値を生成するようになっている。
(もっと読む)
車両の障害物検知装置
【課題】障害物検知手段の異常を検出する。
【解決手段】車両の車体に取り付けられ、車両前方の障害物を検知するミリ波レーダ5と、該ミリ波レーダ5による障害物の検知結果に応じてブレーキ装置8やシートベルトプリテンショナ90を制御する作動制御部48とを備えた障害物検知装置Aにおいて、ミリ波レーダ5によって所定時間内に障害物が検知された検知回数が第1判定回数以上となったことを判定する検知回数判定部43と、この検知回数判定部43によって検知回数が第1判定回数以上となったと判定された超過回数が第2判定回数以上となることを判定する超過回数判定部45と、この超過回数判定部45段によって超過回数が第2判定回数以上になったと判定されたときにミリ波レーダ5のレーダ軸がずれていることを乗員に報知する表示部13及び警報ブザー15とをさらに備える。
(もっと読む)
81 - 100 / 149
[ Back to top ]