
Fターム[5J070BF12]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 警報 (149)
Fターム[5J070BF12]に分類される特許
21 - 40 / 149
物体検出装置及び運転支援装置
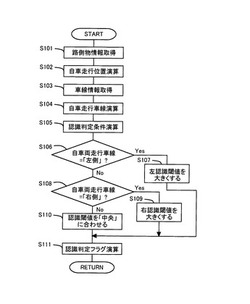
【課題】警報対象とはならない物体に対して警報が行なわれることを抑制する。
【解決手段】レーダで自車両の後側方の車両を検出する物体検出装置において、自車両の進行方向に複数の車線を有する道路を走行するときに、自車両が走行している車線を取得する取得手段と、レーダにより検出される物標を車両として認識するときの条件を、取得手段により取得される車線に基づいて変更する認識条件変更手段と、を備える。
(もっと読む)
自動車用衝突モニタ方法および装置
本発明は、所定の周辺領域がモニタリングされる、自動車用衝突モニタ方法に関するものである。本方法は、前記周辺領域内に存在する少なくとも1つの物体の位置データおよび運動方向データを提供するステップ(S1、S5)と、車両構成部品の少なくとも1つの位置およびドライバーの所望の走行方向の少なくともいずれかを与える車両情報を提供するステップ(S2)と、前記車両情報に基づいて物体が自動車に対して衝突危険を与えないことが決定された場合、該物体を識別するステップ(S4)と、位置データおよび運動方向データに基づいて識別されない物体の自動車への接近が検出されたとき、衝突危険を警報するステップ(S8)とを含む。 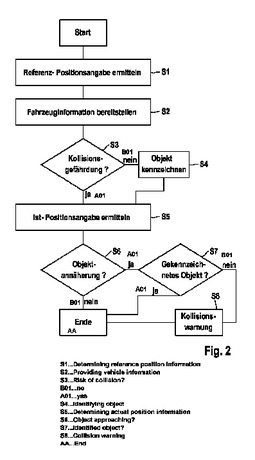 (もっと読む)
(もっと読む)
物体検知方法

【課題】 レーダー装置により至近距離の物体を確実に検知できる物体検知方法を提供する。
【解決手段】 検知されたターゲットと同方向で距離が2倍の位置にダミーターゲットを設定し、ダミーターゲットの位置を含む所定範囲に倍波ターゲット検知範囲を設定し、倍波ターゲット検知範囲に検知されたターゲットを倍波ターゲットとして判定し、倍波ターゲットと同方向で距離が2分の1の位置に補間ターゲットを設定し、補間ターゲットの位置を含む所定範囲に基本波ターゲット検知領域を設定し、基本波ターゲット検知領域に基本波ターゲットが検知されない場合に補間ターゲットを基本波ターゲットとして出力する。このように、検知すべき基本波ターゲットが至近距離において非検知状態になっても、依然として検知されている倍波ターゲットから算出した補間ターゲットにより基本波ターゲットのデータを推定して出力することで、基本波ターゲットを継続的に検知し続けることができる。
(もっと読む)
マイクロ波検出システム
【課題】 コンテンツとしての車両速度計測装置位置情報等の不正な利用を防止することができるマイクロ波検出器用ダウンロードアダプタを提供すること
【解決手段】
所定目標物または所定誤動作源からのマイクロ波を受信して警報を発生するマイクロ波検出器との間で通信を行なうとともに無線通信端末mtとの間で通信を行なう通信制御部21と、無線通信端末mtにより、サーバ30からダウンロードした所定目標物や所定誤動作源の位置情報とを一時記憶する一時記憶部23と、一時記憶部23に記憶した前記位置情報のダウンロードを制御するとともに、当該ダウンロードが終了した後に、当該ダウンロードした前記各位置情報を前記マイクロ波検出器に転送するデータ制御部22とを備える。
(もっと読む)
避退指示装置
【課題】 従来、航空機等の移動体に対して、目標物や目標物に向けて発射される飛しょう体からの避退を指示する場合、オペレータの判断により手動で避退指示を与えていたため、指示タイミングが遅れる、また最適な避退針路でない恐れがあった。
【解決手段】 飛しょう体情報記憶部より読み込む飛しょう体の発射位置及び発射速度と目標情報記憶部より読み込む目標の位置と速度と針路とに基づき飛しょう体を目標に会合させる針路を算出する飛しょう体針路算出部と、目標の針路及び求めた飛しょう体の針路と移動体情報記憶部より読み込む移動体の位置とに基づき避退する移動体を判定する避退対象判定部と、避退対象の移動体の位置及び速度と飛しょう体の針路及び目標の針路とに基づき移動体の避退針路を算出する避退針路算出部と、避退針路算出部より出力される避退針路を移動体に指示する避退指示部と、を備える避退指示装置である。
(もっと読む)
車両制御装置
【課題】車両の安全を十分に確保することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、車両の前方の障害物との距離を検出する第一検出手段と、車両の右折又は左折の開始及び終了を検出する右左折検出手段5aと、車両の前方の所定領域を設定する所定領域設定手段5bと、右左折検出手段5aが車両の右折又は左折の開始を検出した場合に、第一検出手段が所定領域に指向するように、第一検出手段の車両の車体の前方に対する第一角度θ1を制御する第一角度制御手段5cとを含むことを特徴とする。
(もっと読む)
検出装置
【課題】レーダによる物体検知範囲を広角範囲、または狭角範囲を切り替えて使用できるようにする。
【解決手段】アンテナ37−1は、電波を照射して送信信号を送信し、第1の間隔で1列ずつのアンテナが配置されたアンテナ51−2,51−3の対は、送信信号のうち、反射されてくる電波を受信し、第1の間隔よりも広い第2の間隔で、アンテナ51−1,51−2を1本のアンテナとし、アンテナ51−3,51−4を1本のアンテナとしたときのそれらの対は、送信信号のうち、反射されてくる電波を受信し、受信部12は、アンテナ51−2,51−3の対、または、アンテナ51−1,51−2とアンテナ51−3,51−4とをそれぞれ1本のアンテナとした対により受信された電波より受信信号を生成し、衝突予備動作用信号処理部13は、受信信号をサンプリングすることにより、物体を検出する。本発明は、車両安全装置に適用することができる。
(もっと読む)
障害物検出装置
【課題】車両周辺の障害物の位置・形状及びスペースを広範囲かつ正確に検出すること。
【解決手段】アレイ状に配置された素子から送信波を送信し、障害物での反射波を各素子で受信する。その受信信号を受信した時間から障害物の距離を算出し、各素子の受信信号の位相差から障害物の方向を算出する。また、広範囲で障害物を検出するために、各素子に入力する送信信号の位相差を適宜変えて、送信波の合成指向性を制御するとともに、各素子の受信信号に乗算する係数を適宜変えて、受信波の合成指向性を制御する。特に、隣接素子間に位相差を同相、逆相交互に設定することで、指向性を狭角、広角と交互に切り替え、広範囲の障害物の位置検出を可能とする。さらに、移動しながら検出した位置情報から、車両走行経路周辺の障害物の位置・形状及びスペースの認識を可能とする。
(もっと読む)
車両用レーダ装置
【課題】車両下部方向からのクラッタを抑制してターゲットの方向へ効率的にアンテナビームを絞る。
【解決手段】アンテナ素子をプリント整形したアンテナ基板とアンテナスペーサ12とかならるアンテナユニット20を、アンテナ素子11と車体フレームとの間の距離がアンテナ帯域の中心周波数の波長λの1/4となるように取り付ける。更に、アンテナユニット20の下部に、平板状のリフレクタ22と車体取付用のリフレクタスペーサ23とからなるリフレクタユニット21を配設し、アンテナ素子11とリフレクタ22との距離もλ/4に設定する。これにより、車両下部方向からのクラッタを抑制してターゲットの方向へ効率的にアンテナビームを絞ることができる。
(もっと読む)
障害物検出装置
【課題】車両のような移動物体が対向移動物体や固定物体との間での相対速度がゼロでも、対向物体の過度の接近を容易に判定出来る障害物検知装置を提供する。
【解決手段】移動物体Cに対して相対的に移動可能に支持されると共に対向物体Dに向けて送信波を発射し対向物体Dからの反射波を受信する動体検出手段1と、送信波及び反射波の周波数ずれに基づく出力信号に応じて対向物体Dの有無を判定する物体判定手段2と、動体検出手段1を対向物体Dに対して継続して接離移動すると共に移動物体Cに支持されるセンサ位置可変駆動手段3と、動体検出手段1が移動物体Cが所定の駆動域Edにあると見做すと動体検出手段1を所定移動範囲B1で往復動させるようセンサ位置可変駆動手段3を駆動する制御手段4と、を備えたことを特徴とする。
(もっと読む)
物体位置検出装置
【課題】 自車両の後方に存在する物体が位置する車線を精度良く推定できる物体位置検出装置を提供すること。
【解決手段】 自車両の後方に存在する他車両等の後方物体が位置する車線を推定する物体位置検出装置1であって、バッファ更新処理部82によって自車両の過去の走行位置を記憶し、他車両絶対位置演算部83によって後方物体の位置を検出し、自車両の過去の走行位置と後方物体の後方物体の位置との相対位置関係に基づいて、他車両車線推定部85によって後方物体が位置する車線を推定する。よって、自車両が走行した車線に対する後方物体の位置が推定できる。このため、後方物体が位置する車線を精度良く推定することができる。
(もっと読む)
対象物検出装置及び対象物検出システム
【課題】ミリ波レーダで対象物を検出するに際し、ミリ波の反射波が微弱である人物を、車両又は道路上の他の物体と区別して有効に検出することができる対象物検出装置、及び対象物検出システムを提供する。
【解決手段】ミリ波レーダから、対象物候補の方向(A,B,C)、距離及び反射波強度を取得し、遠赤外線カメラから、画像データを取得して人物候補領域の方向(D,E)を特定し、人物候補領域にて特定した人物候補への方向(E)に反射波強度が所定値よりも低い対象物候補が有るか否かを判断し、対象物候補が有る(Bの方向の対象物候補)と判断した場合、当該対象物候補を人物候補として検出する。
(もっと読む)
レーダシステム、及び移動体
【課題】 車体の傾きを検知する手段を特に設けなくても、レーダシステムにおけるレーダ装置の軸ずれを検出する。
【解決手段】 車両に搭載されるとともに地軸に対するアンテナの傾きを検出するセンサを有し、前記傾きが基準角度になるように調節される複数のレーダ装置と、前記レーダ装置相互で前記傾きの変化量が一致するか否かを判定し、前記変化量が一致しないときには警告出力を行う制御部とを有するので、移動体にその傾きを検知するセンサを設けなくても、レーダシステムに含まれるレーダ装置の軸ずれを検出することができる。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】ランダムに検出される検出位置情報に基づいて、正確に物体の進行方向および速度を検出できるようにする。
【解決手段】検出位置特定部81は、検出された物体の検出位置における速度、距離、および角度に基づいて、物体の相対的な検出位置を特定し、含有数カウント部86は、物体の相対的な検出位置を時刻に対応付けて、水平方向の検出位置を示す軸と進行方向の検出位置までの距離を示す軸とで設定される2次元の平面上にプロットし、物体の進行方向の先頭部分が所定時間内に通過すると予想される平面上の形状からなるフレームを所定の回転角度で回転させながら、回転角度毎にフレーム内に含まれるプロットされた検出位置の数をカウントし、方向決定部87は、カウントされたプロット数が最大となるフレームの回転角度に基づいて、物体の存在する存在位置、および進行方向を決定する。本発明は、車両安全装置に適用することができる。
(もっと読む)
障害物検出および警告のためのシステムおよび方法
【課題】すべての潜在的に危険な障害物を適切に検出できる障害物検出システムを提供する。
【解決手段】障害物検出システム100は、無線周波数(RF)信号を放射するように動作可能な送信アンテナ112と、そのアンテナからのRF信号の送信を制御するように動作可能な送信器102とを備える。この障害物検出システムはまた、RF信号の反射を受信するように動作可能な受信アンテナ110と、障害物、およびその障害物の1つまたは複数の物理的属性を識別するために、受信された反射のレーダ断面積RCSの複数の特性を解析するように動作可能な処理回路106とを備える。送信器は、前記送信アンテナを介した周波数変調連続波(FMCW)無線周波数信号の送信を制御するように動作可能である。送信アンテナは、非ポラリメトリックRF信号を送信するように動作可能である。
(もっと読む)
測距システム
【課題】極至近距離の測距を可能にする新規な測距手法を提供する。
【解決手段】判定部3は、パルスレーダ1によって生成された受信波形を時間軸上において複数の区間に分割し、分割された区間のそれぞれにおける受信波形の積分値の大小関係に基づいて、受信波形の位相パターンを判定する。測距部4は、ターゲットの既知の距離において出現する位相パターンを特定するとともに、この位相パターンの繰り返しに基づいて、既知の距離からの変化量を算出し、これによって、ターゲットの現在の距離を算出する。
(もっと読む)
信号処理装置、及びレーダ装置。
【課題】 電子スキャン方式のレーダ装置においてアンテナ間隔をある程度離間させた状態であっても、方位角検出範囲を広角化する。
【解決手段】 目標物体に反射された送信信号を複数のアンテナで受信して前記アンテナごとのビート信号を生成するレーダ送受信機の信号処理装置は、前記ビート信号を合成して合成ビート信号を生成する合成手段と、前記ビート信号のいずれかと前記合成ビート信号に基づいて前記目標物体の方位角を検出する方位角検出手段とを有するので、アンテナ対の間に仮想アンテナを配置した場合にこの仮想アンテナにより得られるビート信号と同じ位相の合成ビート信号を得ることができ、ビート信号と合成ビート信号とに基づき方位角を検出することで、アンテナ間隔をある程度離間させたままで位相折り返しが発生しない方位角検出範囲を広角化できる。
(もっと読む)
車両周辺監視装置
【課題】視差オフセット量を算出するに際に基準とする対象物を移動する対象物として高精度に視差オフセット量を算出することができる車両周辺監視装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、2つの撮像装置の光軸間平行度ずれに起因する視差オフセット量が算出される。レーダ装置により距離が検出される一の照射領域に対象物が1つのみ存在し、かつ、一の照射領域に対応する撮像画像における一の局所画像領域に、抽出された対象物が1つのみ存在するという所定条件を満たす場合に、レーダ装置により対象物までの距離が検出されるとともに、2つの撮像装置により得られた対象物の視差が算出される。前記のことより、視差オフセット量を高精度に算出することができる。
(もっと読む)
車両用警報装置
【課題】 従来よりも適切に安全運転を支援することのできる車両用警報装置を提供すること
【解決手段】 自車両の前方物との距離を検出する車間距離測定器22と、自車両の速度を検出する速度検出手段と、マイクロ波を検出するマイクロ波受信器4を備え、警報手段は、マイクロ波受信器によって所定のマイクロ波が検出された場合にマイクロ波検出警報を報知するマイクロ波警報報知機能と、車間距離測定器で検出された自車両の前方物との距離と速度検出手段によって検出した自車両の速度とに基づき車間警報を報知する車間警報報知機能とを有する。そしてマイクロ波警報報知機能による報知と車間警報報知機能による報知を異なる態様で行うようにした。
(もっと読む)
信号処理装置、レーダ装置、及び、車両制御システム。
【課題】 機械走査方式のレーダ装置において1チャネルの角度信号からでもアンテナの回動方向を検出する。
【解決手段】 アンテナ角度検出手段は、仮決めした回動方向におけるアンテナ角度を検出し、静止物の方位角度の変位方向が前記車両の旋回方向と反対方向であるときには前記仮決めされた回動方向を正しいと判定し、前記変位方向が前記車両の旋回方向と同じ方向であるときには前記仮決めされた回動方向を誤りと判定することでアンテナの回動方向を確定するので、1チャネルの角度信号からでもアンテナの回動方向を検出できる。
(もっと読む)
21 - 40 / 149
[ Back to top ]