
Fターム[5J070BF12]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 警報 (149)
Fターム[5J070BF12]に分類される特許
121 - 140 / 149
物体検出装置
【課題】 物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報との関係が判断基準を満たしている場合にレーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体と判断する判断手段8とを備え、物体までの距離が長い場合には判断基準を同一物体と判断し易くなるように変更することを特徴とする。
(もっと読む)
ミリ波レーダモジュール

【課題】簡単かつ安価な構成で、ミリ波レーダモジュールから正常な最終出力が得られているか否かを確実に検出することができる異常監視機能を備えること。
【解決手段】変調信号に基づいて周波数変調されたミリ波の送信波を送信する送信系高周波回路3aおよび送信波と目標から跳ね返ってくる受信波との周波数差に対応するビート信号を生成する受信系高周波回路3bを有する高周波回路3と、変調信号を送信系高周波回路3aに出力するとともに、ビート信号を信号処理する信号処理回路5とを備えるミリ波モジュールにおいて、運用時に、受信系高周波回路3bから出力されるビート信号のノイズレベルに基づいて高周波回路の異常を検出する異常監視手段を備える。
(もっと読む)
距離検知装置
【課題】距離を検知する際の誤差を抑えて、かつ、安価な距離検知装置を提供することを目的とする。
【解決手段】電波を送信する第1通信手段11と、音波を受信して電気信号に変換するセンサ14と、センサ14で変換された信号から特定の信号を検出する検出手段15と、を有する第1装置Aと、第1通信手段11からの電波を受信する第2通信手段21と、第2通信手段21が電波を受信したときに音波を発振する音波発振手段23と、を有する第2装置Bと、を備え、第1装置Aは、第1通信手段11が第2通信手段21に電波を送信してから、センサ14が音波発振手段23からの音波を受信し、検出手段15によって特定の信号が検出されるまでの時間を計測する時計13をさらに備え、時計13が計測した時間と、音波の速さとから第1装置Aと第2装置Bとの間の距離を検知する距離検知装置。
(もっと読む)
レーダ装置
【課題】 本発明は、送受信部のレーダアンテナに付着した雪、泥などの汚れに起因したアンテナ感度の低下を精度良く判定できるスキャン式レーダ装置を提供する。
【解決手段】 所定の角度で順次ビームをスキャンして送信するレーダアンテナを有し、送信されたビームが前方のターゲットから反射された反射波を該レーダアンテナで受信して、ターゲットを検出するスキャン式レーダ装置において、ターゲットからの反射波信号のレベルに基づいてアンテナ感度が低下したか否かの判断を行うが、検出されたターゲットが、例えば、オートバイ等のように、検出される幅が狭い場合、或いは、元々反射波信号レベルが低い場合には、反射波信号のレベルが低くても、アンテナ感度が低下したと判定しないようにした。
(もっと読む)
行動検出システム
【課題】 低コストでかつ日頃の徘徊の程度のような行動パターンを容易に検出可能な行動検出システムを提供する。
【解決手段】 行動検出システムは、人が保持し、トリガー信号に応答してID番号を出力するIDタグと、それぞれが異なる機能を提供する複数の位置にそれぞれ設けられ、トリガー信号を発信するトリガー信号発信部と、IDタグの出力したID番号を受信するトリガー信号受信部と、複数のトリガー信号受信部に接続され、トリガー信号受信部の受信したID番号をその受信時刻とともに保持するデータ保持手段と、データ保持手段の保持するデータの中から、特定の人のデータを抽出する抽出手段と、抽出手段の抽出したデータに基づいて、所望の表示を行なう表示手段とを含む。
(もっと読む)
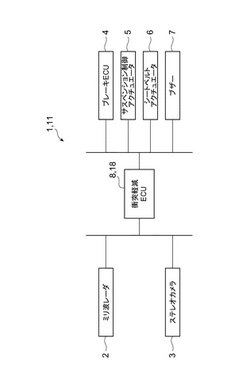
少なくとも1つの側方および後方の周辺状況捕捉装置を有する自動車用の危険検知システム
本発明は、少なくとも1つの、側方および後方の周辺状況捕捉装置を有する、自動車用の危険検知システムに関する。本発明は、少なくとも1つの、側方および後方の周辺状況捕捉装置、周辺状況解釈装置および運転者反応支援装置を有する、自動車用の危険検知システムであって、周辺状況捕捉装置が、本危険検知システムを搭載した自動車に対して相対移動する移動対象物を捉えるシステムに関する。この危険検知システムは走行方向に逆向きに配置されている2つのセンサを有している。このシステムはデータの算出用として、センサ毎に少なくとも1つの評価および解釈ユニットを有している。 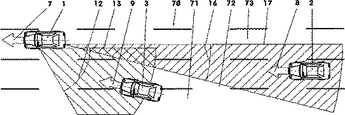 (もっと読む)
(もっと読む)
車両の走行制御装置
【課題】 自車の前方に存在する複数の物体が不適切に統合されるのを防止して車両制御を的確に行えるようにする。
【解決手段】 レーダー装置で自車Vaの前方の物体T1…を検知し、所定範囲内に存在する複数の物体T1〜T5を統合して大型車両Vbに対応する目標物体Taとする。目標物体Taの代表位置から3m以上前方に離れており、かつ代表位置の左端点から0.8m以上左方(推定軌跡に近づく方向)に離れており、かつ自車Vaから前方50m以内にあり、かつ自車Vaの推定軌跡内に含まれる領域に物体T5が存在すれば、その物体T5を小型車両Vcに対応する目標物体Tbとして元の目標物体Taから分離する。そして目標物体Tbに基づいて自車Vaの走行状態を制御することにより、自車Vaの推定軌跡内に存在する小型車両Vcに対して適切に制御できる。
(もっと読む)
電磁放射を放射および/または受信するための装置および方法
電磁放射を放射および/または受信するための装置(100)および方法を発展し、該装置(100)のエレベーション方向(E)のビームローブの角度(Θ)を簡単かつ低コストで実現するため、異なるアンテナ素子(32,34,36,38)によって放射および/または受信される放射の位相シフト(Δφ)、ないしは電磁放射の放射および/または受信のエレベーション方向(E)の角度(Θ)が、
・線路(20)の実効誘電率(εeff)とりわけ伝播係数を変化させることによって調整され、および/または
・少なくとも部分的に導電性の材料から形成された少なくとも1つのエレメント(50,52,54)を、線路(20)および/またはアンテナ素子(32,34,36,38)までの間隔が変更可能であるように配置することによって調整されるように構成することが提案される。  (もっと読む)
(もっと読む)
障害物検知装置
【課題】 乗員に違和感を与えずに障害物との距離を正確に伝えることができる障害物検知装置を提供する。
【解決手段】 障害物検知装置10は所定の検知領域に波動を送信する送信部と前記波動が障害物21によって反射された反射波を受信する受信部とからなるセンサ部7により、車両1の障害物21を検知する。センサ部7の出力により障害物21までの距離を計測する。検知距離可変回路16により最大検知距離L1内における予め定められた検知距離L2,L3を変化させる。警報手段20により検知距離に対応して段階的に警報を発生する。
(もっと読む)
減衰器、それを用いた高周波送受信器およびレーダ装置ならびにレーダ装置搭載車両およびレーダ装置搭載小型船舶
【課題】 減衰器が組み込まれる高周波送受信器等のモジュールの筐体の外側で減衰量を調整することができる減衰器を提供すること。
【解決手段】 高周波信号の波長の2分の1以下の間隔で平行に配置した平板導体1,2間に誘電体線路3を配置しており、平板導体1,2の一方(平板導体1)に対して誘電体線路3の一端3a側のLSMモードの定在波の電界が強い箇所に設けられた貫通孔1aに、平板導体1よりも導体損失の大きい材質から成るシート状の抵抗体部材4の主面が高周波信号のTE10モードの電界の方向に平行に配置され、抵抗体部材4の一端が1つの内壁の中央部に接合されており、その一端から他端までの幅が他端が他の内壁に接触しないように入力側から出力側に向かって除々に大きくなっている、高周波信号を減衰させる導波管G1を接続する減衰器である。モジュールの筐体を構成する平行平板1の外側で減衰量を調整することができる。
(もっと読む)
障害物検知装置
【課題】車両周辺の障害物を検知し報知する障害物検知装置において、車両遠方での障害物に対しては、音による報知を極力減らすとともに、その障害物が急接近したときには、ドライバーに速やかに伝えるようにする。
【解決手段】車両遠方と近傍を区分する距離閾値DT2を設定し、その距離閾値DT2以上の位置で障害物を検知したときは、その障害物の距離情報の時間変化から車両との相対速度を算出する。その相対速度が所定の速度VT以上のときには、急接近を表す報知(図3(b)、図4(b))を行う。また、その相対速度が、VT以下のときには、音による報知は行わない。
(もっと読む)
車両用後側方警報装置
【課題】 ガードレールや壁等の路側の静止物に対しては警報せず、後方から接近する車両や自車両の死角領域に留まる車両に対しては確実に警報する車両用後側方警報装置を提供する。
【解決手段】 警報対象判定手段は、ピーク検出手段により求められたピークタイミングをもとに着目するサンプリングタイミングを設定する着目サンプリングタイミング設定手段と、着目されたサンプリングタイミングのFFT演算結果について、周波数閾値設定手段により設定された周波数閾値以上の周波数成分が存在するか否かを判定する周波数判定手段とを備え、前方接近物認識手段により、物体が自車両の前方方向から接近していると判定された場合において、周波数判定手段により周波数閾値以上の周波数成分が存在すると判定されたときに、この物体は静止物であるとして警報対象でないと判定する。
(もっと読む)
高周波送受信器およびそれを具備するレーダ装置ならびにそれを搭載したレーダ装置搭載車両およびレーダ装置搭載小型船舶
【課題】 中間周波信号を遮断するスイッチを備えたパルス変調方式の高周波送受信器において、スイッチの出力の直流レベルを安定にすること。
【解決手段】 パルス変調方式の高周波送受信器において、ミキサー6の出力端6aに接続された、中間周波信号を後段に出力する第1の系統S1および中間周波信号を終端する終端回路としての抵抗11が接続された第2の系統S2に交互に切り替えるスイッチ7と、ミキサー6の出力端6aとスイッチ7の入力端7aとの間に直列に接続された交流結合コンデンサ12とを備えている高周波送受信器である。交流結合コンデンサ12が、ミキサー6の出力の直流成分を遮断し、スイッチ7の入力端7aの直流レベルを安定にするため、スイッチ7の第1の系統S1への出力の直流レベルを安定にすることができる。
(もっと読む)
物の所在検査
非接触で読取り可能なデータ・キャリア(T1、T2、T3、T4)によって特徴付けられた物(1、2、3、4)の所在を検査する方法において、その所在が検査される物のデータ・キャリアが1つの検査グループ(UG)に割り振られ、非接触で読取り可能な各データ・キャリアは一意にあるいはグループで識別されることができる。データ・キャリア(T1〜T6)はデータ・キャリア読取り手段(5)によって検出され、検出されたデータ・キャリア(T1〜T6)の少なくとも1つが、活性化グループ(AG)に割り振られているかどうかが検出される。検出されたデータ・キャリア(T4、T5)の少なくとも1つが活性化グループ(AG)に割り振られている場合、所在検査が活性化され、その所在検査中に、検査グループ(UG)に割り振られた全データ・キャリア(T1〜T4)がデータ・キャリア読取り手段(5)によって検出されたかどうかが検査され、そうでない場合には警告信号(AL)が伝送される。 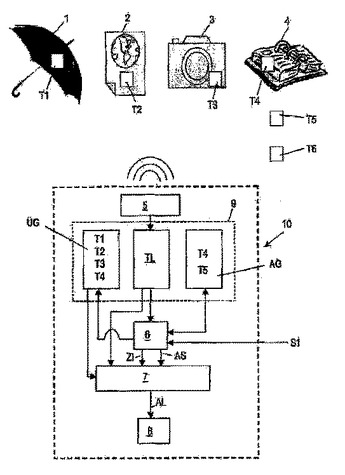 (もっと読む)
(もっと読む)
無線端末装置、コードレス電話装置セット、通信制御プログラム、及びコンピュータ読み取り可能な記録媒体
【課題】中継装置の通信可能エリアに束縛されることなく、行方不明の無線端末装置を捜索し、その手がかりを得ることができる無線端末装置を実現する。
【解決手段】 本発明に係る無線端末装置は、通信相手の無線端末装置の識別情報を記憶する記憶部17と、信号を送受信する通信部12と、上記識別情報を含む送信用信号を作成し、当該送信用信号を通信部12を介して発信する通信制御部14と、通信制御部14を介して受信した受信信号に上記識別情報が含まれているか否かを、上記記憶部17に記憶された識別情報との比較によって検出する検出部16と、を備えている。それゆえ、送信用信号による発呼に対し、通信相手の無線端末装置が応答するか否か、すなわち、通信相手の無線端末装置が、捜索側の無線端末装置の通信可能範囲内に存在しているか否かの手がかりをつかむことができる。
(もっと読む)
センシング手段及び接近警告システム
【課題】降雨や降雪による誤検知が考え得る場所に設置した場合に、誤検知の発生頻度を低減することができるセンシング手段及び接近警告システムを提供する。
【解決手段】電波発信部1及び電波受信部2が斜め下方に向けられていることで、重力によって下方に向けて進行する雨滴Aや雪粒Yは電波発信部1及び電波受信部2から全て遠ざかる方向に進行するようになり、電波受信部2から遠ざかる方向に進行する移動体から生じる反射波R2を検知対象から排除することで、かかる雨滴Aや雪粒Yにより生じる反射波R2に起因する誤検知の発生頻度を低減することができる。また電波受信部2から遠ざかる方向に進行する移動体を検知対象から排除するのみであるから、判別手段3を簡便なものとできる。
【参照図】 図2
(もっと読む)
レーダ装置およびレーダ装置のアンテナ指向性調整方法
【課題】 機械的な軸ずれ調整を行うことなく、アンテナ指向性を調整することが可能なレーダ装置を得る。
【解決手段】 少なくとも1個のアンテナ(10)と、周波数変調された信号を生成しアンテナ(10)を介して送信する送信機(31)と、送信された信号の物体による反射波をアンテナ(10)を介して受信する受信機(33)と、送信された信号と受信された信号とに基づいて前記物体までの距離および物体の移動速度を演算する演算処理部(60)とを備えるレーダ装置において、送信機(31)の送信周波数を調整する周波数調整器(80)を設け、この周波数調整器(80)によって送信周波数を変更し、アンテナ指向性を調整する。
(もっと読む)
マイクロ波検出器用ダウンロードアダプタおよび位置検出機能付マイクロ波検出器のデータ更新システム
【課題】 コンテンツとしての車両速度計測装置位置情報等の不正な利用を防止することができるマイクロ波検出器用ダウンロードアダプタを提供すること
【解決手段】
所定目標物または所定誤動作源からのマイクロ波を受信して警報を発生するマイクロ波検出器との間で通信を行なうとともに無線通信端末mtとの間で通信を行なう通信制御部21と、無線通信端末mtにより、サーバ30からダウンロードした所定目標物や所定誤動作源の位置情報とを一時記憶する一時記憶部23と、一時記憶部23に記憶した前記位置情報のダウンロードを制御するとともに、当該ダウンロードが終了した後に、当該ダウンロードした前記各位置情報を前記マイクロ波検出器に転送するデータ制御部22とを備える。
(もっと読む)
車両用運転支援装置
【課題】 先行車の捕捉が不安定となった際に、適切なタイミングで走行制御を中断することのできる車両用運転支援装置を提供する。
【解決手段】 PCU6は、車外環境の悪化等によってIPU5による立体物の継続的な認識時間が短くなり先行車の捕捉とロストが頻繁に繰り返されている場合には、判定用カウンタCt1にカウンタ値を加算し、先行車が継続的に捕捉されている場合、或いは、先行車が継続的にロストされている場合にはクリアカウンタCt0の作用によって判定用カウンタCt1からカウンタ値を周期的に減算する。これにより、先行車の捕捉状態に応じて判定用カウンタCt1を適切に増減させることができ、この判定用カウンタCt1の計数値が第1の閾値に達してから少なくとも第2の閾値以下となるまでの間、走行制御のHALTを判定することにより、適切なタイミングでの走行制御の中断が可能となる。
(もっと読む)
レーダ装置の軸ずれ検知方法および検知装置
【課題】 車両単体でレーダ装置の軸ずれ検知を行うことができるようにする。
【解決手段】 車両のレーダ装置取り付け位置前方であってレーダ装置100の検知方向とは異なる方向にある車体の一部に微小反射材を配置し、検知方向にアンテナの指向方向を一致させてレーダ装置100を車体101に取り付け、このようにして取り付けられたレーダ装置100を用いて微小反射材に関する基準データを取得し、車両の使用時にレーダ装置100によって微小反射材に関する使用時データを取得し、基準データと使用時データとを比較して比較結果が予め設定された一定値を超える場合レーダ装置100の軸ずれと判断する。
(もっと読む)
121 - 140 / 149
[ Back to top ]