
Fターム[5J070BF12]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 衝突回避 (511) | 警報 (149)
Fターム[5J070BF12]に分類される特許
41 - 60 / 149
検出装置および方法、並びにプログラム
【課題】他のレーダ測定装置が近傍に存在するような環境においても、混信による影響を低減できるようにする。
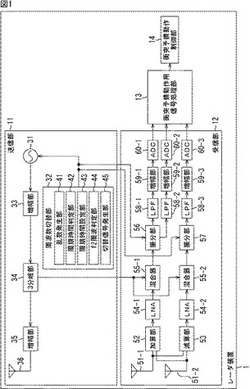
【解決手段】送信部11は、周波数切替部32を制御して1周期ずつランダムな周波数のCW信号を発生させることで、ランダムな間隔で切替信号を発生させ、2種類の周波数の電波を、切替信号に基づいて、交互に切替えて送信する。受信部12は、送信された送信信号としての2種類の周波数の電波のうち、反射されてくる2種類の周波数の電波を、切替信号に基づいて、切替ながら受信し、受信した2種類の周波数の電波より受信信号を生成する。衝突予備動作用信号処理部13は、受信信号を、所定時間の間でサンプリングすることにより、物体を検出する。本発明は、車両安全装置に適用することができる。
(もっと読む)
衝突予測装置

【課題】 物体との衝突部位の予測精度を向上させることができる衝突予測装置を提供する。
【解決手段】 衝突予測装置は、自車両周辺の障害物を検出すると共に、自車両が走行する道路のカーブ半径を推定し、その推定カーブ半径の微分値を算出する。そして、衝突予測装置は、推定カーブ半径の微分値をR補正係数で補正して推定カーブ半径微分係数を算出し、その推定カーブ半径微分係数を用いて、自車両の部位区間毎に蓄積された衝突確率の積算値を補正する。そして、衝突予測装置は、自車両における障害物との衝突部位を予測し、上記の推定カーブ半径微分係数を用いて、衝突確率の積算上げ幅を設定する。そして、衝突予測装置は、該当する衝突部位における衝突確率の積算値に対して今回の衝突確率を積算上げ幅の分だけ加算し、衝突部位毎の衝突確率の積算値に基づいて、自車両のある部位区間に障害物が衝突するかどうかを判定する。
(もっと読む)
アンテナ装置とそれを用いた電子機器
【課題】
本発明は、例えば自動車(電子機器)などに装着され使用されるアンテナ装置とそれを用いた電子機器に関するものであり、小型化を図るとともに位置検出精度を高めることを目的とする物である。
【解決手段】
そしてこの目的を達成するために本発明は、前面側において、所定間隔をおいて設置された第1、第2の送受信開口11a,11bを有するアンテナ体7と、このアンテナ体7の後方において、導波路体8を介して設けた送受信体9を備え、前記導波路体8は、前記アンテナ体7の第1、第2の送受信開口11a,11bに対する導波路長を可変する構成とした。また、前記可動導波路10の固定導波路12、36と対向する面に、固定導波路12、36に向けて突出するほぼλ/4の複数の突起44を設け、この突起44を一構成要件とする位置検出手段を設けた。
(もっと読む)
車両周辺監視装置
【課題】 車両から遠くにある物体を感度良く検出しつつ、検出不要な物体を区別することができる「車両周辺監視装置」を提供する。
【解決手段】 周辺車両検出装置10は、送信波発生部20、送信信号に基づき超音波を送信しかつその反射波を受信する超音波センサ30、超音波センサ30で受信した信号を検波する受信検波部40、検波結果に基づき反射波の受信信号を検出する反射波検出部50、反射波の受信信号を増幅する反射波増幅部60、反射波増幅部60で増幅された信号を用いて警告等を発する警告部70、反射波検出部50の検出レベルを設定する検出レベル設定部80とを含む。
検出レベル設定部80は、車両から物体までの距離が遠ざかるにつれて検出レベルが小さくなるような負の傾きを持つ関数として設定する。
(もっと読む)
障害物検出装置および障害物検出システム
【課題】自車両との衝突危険度が適切に判断できるターゲット選択を行って演算負荷や通信負荷を低減することができる障害物検出装置および障害物検出システムを提供する。
【解決手段】車両の斜め方向から相対的に接近する物体を検出し、車両に対して、検出した物体の相対距離および相対速度を少なくとも算出する。そして、物体の相対距離および相対速度を用いて、当該物体が車両に衝突するまでの衝突予測時間を算出して、衝突予測時間が短い順に予め決められた数の物体を選出し、選出された物体に関する検出情報を出力する。
(もっと読む)
車両用外界認識装置、および、車両システム
【課題】複数の物体が互いに近接している場合でも、これらの物体を高精度で個体認識すること。
【解決手段】車両用外界認識装置100の衝突判定部4は、物体群の左端位置、中心位置、右端位置それぞれについて、両端横速度計算部3で計算される各位置における各横速度をもとに、相対座標系における物体群の移動軌跡を計算し、その移動軌跡が相対座標系における原点に近づくほど各位置における危険度が高いものとして、各位置における危険度を計算し、衝突回避制御部5は、衝突判定部4により計算される物体群の各位置における危険度のうち、少なくとも1つの位置における危険度が所定しきい値を超えるときに、その危険度に対応する物体群に関する衝突回避制御を実行する。
(もっと読む)
マイクロ波を用いて、動いている物体を分類するための方法及び装置
【課題】動いている物体を分類することが望ましい。
【解決手段】送信アンテナ素子の線形アレイによって、監視エリア内にマイクロ波を送信することにより、動いている物体が分類される。動いている物体から逆投影される散乱したマイクロ波が、受信アンテナ素子の線形アレイによって受信される。散乱したマイクロ波から、散乱したマイクロ波の螺旋状の漸進的変化に関連する特徴が抽出される。その後、動いている物体は、抽出された特徴に従って、1組の可能なクラスのうちの1つに分類され、選択されたクラスを示すアラーム信号を生成することができる。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】プリクラッシュ安全装置用のレーダと、車線変更支援装置用のレーダとを共用できるようにする。
【解決手段】送信部11のアンテナ36は、第1の方向で、かつ第1の距離近傍の第1の範囲と、第2の方向で、かつ第2の距離近傍の第2の範囲とを含む範囲に電波を照射することにより送信信号を送信し、受信部12は、送信信号としての電波のうち、反射されてくる電波を受信して、受信した電波より受信信号を生成し、衝突予備動作用信号処理部13は、受信信号を、第1の所定時間の間でサンプリングして、物体を検出し、検出結果に応じ衝突予備動作制御部14を制御して衝突に備える動作を実行させ、車線変更警告用信号処理部15は、受信信号を、第1より長い第2の所定時間の間でサンプリングして、物体を検出し、検出結果に応じ車線変更警告動作制御部16を制御して、車線変更の危険を警告させる。本発明は、車両安全装置に適用することができる。
(もっと読む)
車載用レーダ装置、及びレーダ汚れ報知方法
【課題】ユーザにとって煩わしさを感じさせないように、レーダの汚れの除去を促す報知を行うことができる車載用レーダ装置、及びレーダ汚れ報知方法を提供する。
【解決手段】車載用レーダ装置であって、反射波受信部が受信した反射波の受信強度に基づいて、レーダが汚れていることを検知する汚れ検知部と、ユーザがレーダの汚れを除去してから再度当該レーダが汚れていることが検知されるまでに、所定時間が経過したか否かを判定する時間経過判定部と、レーダが汚れていることを再度検知したときに、所定時間が経過したと判定された場合、レーダが不作動状態であることをユーザに報知すると共に、当該レーダの汚れの除去を促す報知をユーザに行い、所定時間が経過していないと判定された場合、当該レーダが不作動状態であることのみをユーザに報知する報知部とを備える。
(もっと読む)
保護者管理システム
【課題】通信に係わる構成を複雑化することなく、被保護者の迷子・離脱防止を図る。
【解決手段】保護者管理システム1は、保護者P1とともに所定の移動可能領域を移動可能な移動局タグT1と、被保護者P2,P3とともに移動可能な移動局タグT2,T3と、リーダアンテナ12を備えた固定局リーダR1〜4とを有し、移動局タグT1〜T3から送信され固定局リーダR1〜4で受信した電波信号に基づき、移動局タグTの位置検出を行い、その位置検出結果に基づき、移動局タグT1と移動局タグT2,T3との間の距離を検出し、検出された距離が、所定の警報距離以上であるか否かを判定し、判定が満たされた場合、対応する警報指示信号を生成し出力する。移動局タグT1は、警報指示信号に応じて、対応する警報表示を行うとともに移動局タグTの位置を地図上において表示する表示部DPを備える。
(もっと読む)
車両の障害物検知装置
【課題】障害物検知手段による検知状態に応じて作動機器を制御する車両の障害物検知装置において、ノイズに起因する誤検出防止を図り、障害物検知の信頼性向上を図る。
【解決手段】ミリ波レーダ3で障害物検知し、障害物判定手段12が制御ユニット10内のメモリに記憶される情報に基づき、障害物が初めて検知された障害物か判定を行い(S3)、初めて検知された障害物で且つ障害物との距離が所定距離D以内である場合は(S4)、レーダ出力を1サンプリングタイムの間、所定レベル低下させて照射させる(S5)。受信信号の出力がレーダ出力の低下レベルと同レベル分低下している場合、近距離に障害物が実在すると判断されることから、S10に移行してPCS制御を開始する。レーダ出力の低下レベルと受信信号の出力とが対応していない場合は、電磁波ノイズによる障害物の誤検出と判定し(S8)、この障害物をPCS制御対象から除外する。
(もっと読む)
聴覚的な表示のための装置及び方法
複数のスピーカー(220)が、該スピーカー(220)をさまざまに駆動することによって異なる空間的位置を聴覚によって示すことができるように空間的に異なる位置に配置されている再現空間(210)において、物体(200)の位置を聴覚的に表示するための装置(100)が、信号関連付け手段(110)と、スピーカー駆動手段(120)とを備えている。信号関連付け手段(110)は物体(200)に聴覚信号を関連付けるように構成されている。スピーカー駆動手段(120)は複数のスピーカー(220)のための1又は2以上のスピーカー信号(LS)を生成するように構成されており、物体(200)の位置を表示するための1又は2以上のスピーカー信号(LS)は、信号関連付け手段(110)によって物体(200)へと関連付けられた聴覚信号にもとづく。1又は2以上のスピーカー信号(LS)を再生したときに再現空間(210)内に物体(200)の位置が聴覚的に表示されるように1又は2以上のスピーカー信号(LS)を生成することができる。 (もっと読む)
測距システムおよび測距方法。
【課題】故障の自己診断を行い、システムとしての信頼性を高める。
【解決手段】パルスレーダ1は、外部へ送信パルスを送信し、ターゲットで反射された送信パルスを受信波形として受信する。判定部2は、パルスレーダ1が故障していない状態で受信した正常波形と、パルスレーダ1が故障している状態で受信した異常波形との相違に基づいて予め設定された評価演算を用いて、パルスレーダ1が受信した受信波形の評価値を実波形空間上で算出する。そして、判定部2は、算出された評価値と、予め設定されたしきい値とを比較することでフェール判定を行う。
(もっと読む)
車両用走行安全装置
【課題】複数のレーダ装置を設けた場合に生じる不検知領域に物体が存在すると予測される場合に、接触回避効果を高める。
【解決手段】送受信手段が複数備えられており、回避支援手段は、自車前方の領域であって一の送受信部の検知領域および他の送受信部の検知領域間の不検知領域に外挿部により外挿された制御対象物体が存在する場合には(ステップS14:Yes)、不検知領域以外に外挿部により外挿された制御対象物体が存在する場合の作動内容(ステップS8)よりも、接触回避効果の高い作動内容(ステップS11)を設定する。
(もっと読む)
レーダ装置及び物標検出方法
【課題】FM−CWモードで得られた一方のピーク信号が目標とする物標以外の他の物標のピーク信号に埋もれた場合に、ペアリング処理が行えないという問題があった。
【解決手段】本発明のレーダ装置は、FM−CWモードとCWモードとを交互に切り替えて物標を検出するレーダ装置において、FM−CWモードによりアップビートからピーク信号を検出するとともに、ダウンビートからピーク信号を検出する手段と、アップビートから検出したピーク信号と、ダウンビートから検出したピーク信号とをペアリングする手段と、ペアリング手段によってアップビートとダウンビートのうち一方のビートから検出されたピーク信号にペアリングできなかったピーク信号がある場合、CWモードで検出した相対速度に基づいて他方のビートからペアリングできなかったピーク信号のペアリング対象を検索する手段と、を有することを特徴とする。
(もっと読む)
衝突検出装置
【課題】本発明の目的は、自車の側方から接近してくる他車を効率的に検知することができる、衝突検出装置を提供する。
【解決手段】衝突検出装置は、自車前方右側の他車を検出する右側レーダと、自車前方左側の他車を検出する左側レーダと、制御部と、安全システムとを備える。制御部は、各レーダの検出結果に基づいて、自車の側方より接近してくる他車と衝突の危険があるか否か、衝突が避けられるか否かを判断する。安全システムは、制御部からの指示に従って、ドライバーに注意喚起をしたり、ブレーキ操作をアシストしたりする、安全処置を行う。また、各レーダの検出方向中心軸は、車両の直進方向に対して左右いずれかの方向に20°乃至60°の範囲内の向きに設定される。
(もっと読む)
物体検知装置
【課題】自車両の外界に検知された物体が虚像か実像かを容易かつ適切に判定する。
【解決手段】物体検知装置10は、自車両の進行方向に存在する物体を検知する外界センサ11および物体位置検出部31と、検知された物体の自車両に対する相対距離に係る相対関係を算出する相対関係算出部32と、検知された物体が虚像か実像かを判定する虚実判定部34とを備え、自車両に相対する向きに移動する第1物体および第2物体が検知された場合に、第1物体と第2物体との間の車両左右方向距離が所定左右方向距離以上であり、かつ、第1物体と第2物体との間の車両前後方向距離が所定前後方向距離以下である場合に、第1物体および第2物体を判定対象として選択する判定対象選択部33を備え、虚実判定部34は、判定対象選択部33により選択された判定対象が虚像か実像かを判定する。
(もっと読む)
周辺監視装置および周辺監視方法
【課題】自車が他車の死角領域内で走行中であることを運転者に意識させて運転者に注意を促すことができる「周辺監視装置および周辺監視方法」を提供する。
【解決手段】自車の周辺に存在する他車に対する自車の相対的な位置を検出する位置検出部11と、他車の運転者にとっての死角を含む警告発生対象領域を検出する対象領域検出部12と、警告発生対象領域内に自車が存在するか否かを判定する存在判定部13と、警告発生対象領域内に自車が存在すると判定された場合に警告を発する警告発生部14とを備え、自車視点による自車の死角ではなく、他車視点による他車の死角を含む警告発生対象領域を自車にて検出し、当該対象領域を用いて警告発生の必要性を判定することにより、走行中の自車が他車の死角に入ったときに警告が発せられるようにする。
(もっと読む)
車両用物体認識装置
【課題】車間距離制御に対する適応性を維持しつつ、道路を横断する歩行者等の所定物体を適切に監視すること。
【解決手段】電磁波を放射すると共に該放射した電磁波の反射波を受信する電磁波放射受信手段(14、20)と、該電磁波放射受信手段が受信した反射波のデータに基づいて物標との距離及び横位置を含むデータを算出する物標位置データ算出手段(27)と、該物標位置データ算出手段の算出結果に基づいて車両周辺の物体を認識する物体認識手段(30)と、を備える車両用物体認識装置(1)であって、前記物体認識手段は、前記電磁波放射受信手段における受信波強度に関する所定条件を満たす所定物体以外の物体については、第1の認識モードで障害物認識を行ない、前記所定物体については、前記第1の認識モードに比して物体接近時の横位置応答性が高い第2の認識モードで障害物認識を行なうことを特徴とする。
(もっと読む)
車両周辺監視装置、車両、車両周辺監視プログラム
【課題】撮像装置を通じて対象物の検出される一方、レーダを通じてこの対象物の存在が明確に認識されない場合でも、車両からこの対象物までの距離を高精度で測定することができる装置等を提供する。
【解決手段】本発明の車両周辺監視装置10によれば、赤外線カメラ(撮像装置)11の撮像領域を構成する一の対象領域において複数の対象物が検出され、かつ、各対象物について異なる測定距離が測定された場合、第1対象物の測定距離が、レーダ装置12により取得された反射強度データに基づき、反射強度が最高のピークを示す「第1距離」に補正される。また、当該複数の対象物のうち第i+1対象物(i=1,2,‥)の測定距離が、反射強度データに基づいて第i+1対象物の測定距離を基準とし、かつ、第1距離ないし第i距離のすべてを包含しない第i+1距離範囲において反射強度が最高のピークを示す「第i+1距離」に補正される。
(もっと読む)
41 - 60 / 149
[ Back to top ]