
Fターム[5J070BF20]の内容
レーダ方式及びその細部 (42,132) | 衝突防止 (1,451) | 先行車の判別に関するもの (83)
Fターム[5J070BF20]に分類される特許
21 - 40 / 83
物体検知装置、周辺監視装置、運転支援システムおよび物体検知方法
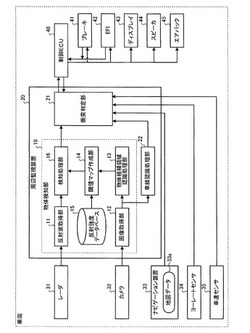
【課題】様々な物体を高精度に認識することのできる物体検知装置、物体検知方法、またかかる物体検知を用いた周辺監視装置および運転支援システムを提供すること。
【解決手段】物体検知波部10は、カメラ32が撮影した画像に対する画像認識によって物体候補領域を識別し、当該領域に存在する可能性のある物体の種別、方向、距離、角度に基づいてレーダ検知の閾値を設定した閾値マップを作成する。検知処理部16は、レーダ31の反射波強度と閾値マップに示された閾値とを比較して、物体の存在を検知する。
(もっと読む)
物体検出装置

【課題】簡単な構成によって路面かあるいは路面上の物体かを判別する物体検出装置を提供することを課題とする。
【解決手段】路面上に存在する物体を検出する物体検出装置1であって、物体の位置を検出する位置検出手段10,21と、位置検出手段10,21で検出する際の少なくとも鉛直方向の検出角度を設定する検出角度設定手段24と、検出角度設定手段24によって設定された検出角度に変化させた前後で位置検出手段10,21によって所定時間間隔でそれぞれ検出された各位置の変化に基づいて路面か又は路面上の物体かを判定する判定手段25とを備えることを特徴とする。
(もっと読む)
先行車検出装置およびこれを用いた車速制御装置
【課題】 先行車の車線変更を検出できる先行車検出装置およびそれを用いた車速制御装置を提供する。
【解決手段】 先行車検出装置100は、先行車の自車両に対する進行角度である背面角度を検出する先行車横位置および車体傾き演算記憶部303と、自車両の直進状態を検出し、自車両の直進中に背面角度が増加後減少した場合、先行車は車線変更したと判定する先行車および走行路判定部302と、を備える。
(もっと読む)
物体種別判定装置、物体種別判定方法、及び物体種別判定用プログラム
【課題】レーダによる検出結果に基づいて、車両等の物体の種別を適切に判定することができる物体種別判定装置、方法、及び物体種別判定用プログラムを提供する。
【解決手段】物体種別判定装置は、レーダ20により複数の方位角に電磁波を照射し、それぞれの方位角における物体の検出点を取得する検出点取得手段11と、取得された複数の検出点のうち、同一の物体についての検出点であると想定される検出点をグループ化して、点列データとして抽出する点列データ抽出手段12と、抽出された点列データが、方位角が増加又は減少するに従って、検出点のレーダ20からの距離が直線的に減少する第1の状態から直線的に増加する第2の状態に切り替わる変位特性を有するか否かを認識する変位特性認識手段13と、変位特性認識手段による認識結果に応じて、点列データが抽出された物体の種別を判断する種別判断手段14とを備える。
(もっと読む)
物体検知装置
【課題】所定範囲内で検知した複数の物体を統合して単一の物体として認識する際に所定範囲を適切に設定する。
【解決手段】物体検知装置10は、自車両の進行方向の検出対象領域に電磁波を発信し、物体からの反射波を受信する外界センサ11と、外界センサ11の検知結果に基づき、自車両に対する物体の位置および絶対速度を算出する物体位置検出部31および絶対速度算出部32と、所定統合範囲内に対して複数の異なる反射波が受信された場合に、少なくとも物体の位置に基づき、所定統合範囲内の複数の物体を統合して単一の物体として認識する物体統合部33とを備え、物体統合部33は、複数の物体のうち任意の物体の位置を基準として略矩形状の所定統合範囲を設定し、任意の物体の絶対速度に基づき、所定統合範囲の前後方向幅および左右方向幅を互いに独立に設定する。
(もっと読む)
車両用障害物検出装置
【課題】障害物と非障害物の判別を容易に行うことが可能な車両用障害物検出装置を提供することを目的とする。
【解決手段】自車両から異なる領域へ向けて検出用波動を照射し、検出用波動に対して応答する反射波をとらえることにより自車両周辺の波動反射点位置情報を検出する検出装置を備え、前記検出装置により検出された波動反射点位置情報に基づき自車両周辺の物体が識別された際に、識別された該物体が障害物であるか否かを判定する障害物判定手段を有する車両用障害物検出装置であって、前記検出装置は、自車両から所定角度で俯角方向に前記検出用波動を照射し、前記障害物判定手段は、前記波動反射点位置情報を基に求められる自車両から前記物体までの距離と前記所定角度の角度値とから算出される前記物体の高さに応じて、当該物体が障害物であるか否かを判定することを特徴とする。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段で今回検出された各検出点をグルーピングするグルーピング手段3と、前回のグループに基づいてグルーピング手段3で今回グルーピングされた複数のグループを統合する統合手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段2で今回検出された検出点をグルーピングするグルーピング手段3と、前回の複数のグループに基づいてグルーピング手段3で今回グルーピングされたグループを複数のグループに分割する分割手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段2で検出された各検出点の位置におけるレーダ検出手段2の距離分解能に応じてグルーピングの閾値を設定する閾値設定手段3と、レーダ検出手段2で検出された各検出点を閾値設定手段3で設定された閾値に基づいてグルーピングするグルーピング手段3と、グルーピング手段3でグルーピングされたグループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
車載用レーダ装置
【課題】 間違った目標捕捉(乗り移り)の発生を回避できる車載用レーダ装置を提供する。
【解決手段】 自車(10)前方にパルス状の電磁波(12)を周期的に照射し、その反射波(13)に基づいて、少なくとも目標の水平方向の幅を測定する車載用レーダ装置(11)において、前記反射波の先回または数回前の強さと今回の強さとを比較する比較手段(17)と、今回の反射波の強さが急減少し、且つ、前記目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに間違った目標であると判定する第1判定手段(17)とを備える。または、今回の反射波の強さが急増大したときに間違った目標であると判定する第2判定手段(17)を備える。
(もっと読む)
測定装置および方法
【課題】より少ない演算量で対象物に関係する情報を演算する。
【解決手段】2周波CWレーダ1は、自車の後方あるいは側方にある対象物を認識し(S11)、認識された対象物群を、自車に接近する対象物と、自車から離反する対象物とに判別し(S12)、接近離反の判別結果に基づいて、認識された対象物群の中から、自車に接近すると判別された対象物のみを抽出し(S13)、抽出された対象物との距離Lまたは相対速度vの少なくとも一方を算出し(S14)、測定結果sを出力する(S15)ことで、より少ない演算量で対象物に関係する情報を演算できる。本発明は、対象物を測定する測定装置に適用できる。
(もっと読む)
物体検出装置および物体検出方法
【課題】 検出点の変化に伴う相対速度の誤算出を防止でき、物体の検出精度を高めることができる物体検出装置を提供する。
【解決手段】 レーザレーダ1と、生成された複数の検出点のうち、同一物体であると推定される検出点をグループ化するグルーピング部31と、同一グループに含まれる各検出点と自車の距離を平均化し、当該平均距離の時間的差分に基づいて検出物体の自車に対する相対速度を算出する相対速度算出部32と、を備えた物体検出装置において、相対速度算出部32は、同一グループに含まれる検出点の個数が変化した場合、検出点の個数が変化する直前に算出した相対速度を維持する。
(もっと読む)
車幅検出方法及び装置、車両制御装置
【課題】アンテナを大型化することなく、レーダからの検出結果に基づいて車幅を検出できるようにし、更には、その車幅を利用した車両制御の信頼性を向上させる。
【解決手段】レーダ波を反射したターゲットの検出結果から、連続的に配置された路側物の位置、先行車両が位置する方向θt及び該先行車両までの距離Rt、路側物によって生じる先行車両の虚像が位置する方向θi及び該虚像までの距離Riを抽出する。更に、路側物の位置から自車両の進行方向に対する路側物の配置角度ψを求めると共に、虚像の方向θiに位置する路側物までの距離Rwを求め、次式に従って、車幅Wを算出する。
W=2{Rw×sinθi+Rt×sinθt−(Ri−Rw)×sin(θi+2ψ)}
(もっと読む)
物体検出装置
【課題】二つの検知手段の検知結果に基づいてゴースト判定を行うことにより、適切な物体検出が行える物体検出装置を提供すること。
【解決手段】車両2の前方にある物体を検知するレーダ5、及び車両2の前側方にある物体を検知するレーダ3、4を備え、レーダ5により物体をトラッキングしている際にその物体より近距離の位置に他の物体が検知された場合、レーダ3、4の検知結果に基づいて他の物体をレーダ5トラッキングの対象とするか否かを判断して物体検出を行う。この場合、レーダ3、4の検知結果に基づいて他の物体をレーダ5のトラッキングの対象とするか否かを判断することにより、他の物体が大型車の反射などによるゴーストであるか否かを的確に判断することできる。
(もっと読む)
車種判別装置
【課題】車両に搭載された検知手段を用いて他車両の車種を判別する車種判別装置を提供することを課題とする。
【解決手段】車両の車種を判別する車種判別装置1であって、車両を検出する車両検出手段3aと、車両検出手段3aで検出した車両の車体のフレームを検出するフレーム検出手段3bと、フレーム検出手段3bでの検出結果に基づいてフレームの有無又は/及び形状によって車種を判別する車種判別手段3cとを備えることを特徴とする。
(もっと読む)
車両用物体検知装置
【課題】 自車の走行の障害とならない停止物を対象とする不必要な車両制御が行われるのを防止する。
【解決手段】 制御対象物体認識手段M5により前回まで制御対象であると認識されていた物体が、今回制御対象であると認識されなくなったとき、相対関係予測手段M3により予測された物体を実際に検知されたものと見なして外挿手段M6が所定回数を限度に外挿する際に、その物体が静止物であって、かつ略等間隔で連続する連続性を有する場合には、外挿手段M6が外挿を行う回数の限度を例えば5回から2回に減少させるので、トンネルの天井に一定間隔で設けられた照明灯のような静止物に対する外挿回数を減らし、自車が接触する虞のない静止物に対する不必要な車両制御が行われるのを防止して運転者の違和感を解消することができる。
(もっと読む)
車両用物体検知装置
【課題】自車周辺に存在する物体の相対速度を適切に検出する。
【解決手段】車両用物体検知装置を、レーダ装置15と、レーダ装置15によって発信された電磁波が物体の表面上で反射する際の反射点を算出する反射点算出部32と、電磁波毎の反射点同士の間隔が第1所定値未満の反射点同士を同一のセグメントに存在すると認識するセグメント設定部34と、セグメントの重心を算出する重心算出部35と、重心に基づいて自車と物体との相対速度を算出する相対速度算出部37とを備えて構成した。相対速度算出部37は、鉛直方向の所定角度のうち最も下方側に発信される電磁波に基づいて算出される反射点に対し、前回の処理での反射点の数よりも今回の処理での反射点の数が所定数以上多い場合には、自車進行方向に対する横方向の相対速度の算出結果を削除する。
(もっと読む)
物体検出装置および方法、ならびに物体検出装置を備えた車両
【課題】電磁波によってその物体を検出した時点におけるその物体の移動速度および移動方向を求める。
【解決手段】電磁波を送信し物体から反射される電磁波を異なる位置で受信するレーダヘッド201,202と、レーダヘッド201,202から出力される受信信号より少なくとも物体の相対速度および方位を求めるレーダ信号処理部311,312とを有する複数のレーダ装置と、その複数のレーダ装置によって求められる物体の相対速度および方位を用いて、その物体の移動ベクトルを算出する移動ベクトル検出部402とを備える。
(もっと読む)
物体検出装置
【課題】多様な霧や湯煙等の不規則形状物体を簡易かつ確実に判定することができる物体検出装置を提供する。
【解決手段】車両の周辺に電磁波を送信して、その反射波から車両周辺の物体を検出する物体検出装置は、電磁波の送信タイミングと受信タイミングから反射点までの距離を算出し、電磁波の照射方向から電磁波が物体上で反射点の実空間ベクトルを算出する(STEP40)。また、複数の反射点を距離が所定範囲内となる反射点を1つの反射点群として分類し、該反射点群の存在する実空間上の範囲を1つのセグメントとする(STEP50)。そして、第1反射点群としてセグメント化された第1セグメントにおいて、第1セグメントを通る前記電磁波の走査線上で第1反射点以外の第2反射点をも生じている第1反射点が所定の比率以上存在する場合に、該第1セグメントから構成される物体を霧や湯煙等の不規則形状物体であると判定する(STEP60)。
(もっと読む)
車両用物体検知装置
【課題】適切に物体を検知する。
【解決手段】車両用物体検知装置を、自車周辺の所定角度に亘って電磁波を発信すると共に自車周辺に存在する物体からの電磁波の反射波を受信するレーダ装置15と、電磁波が物体の表面上で反射する際の反射点を算出する反射点算出部32と、電磁波毎の反射点同士の間隔が第1所定値未満の反射点同士を同一のセグメントに存在すると認識するセグメント設定部34と、セグメントの重心を算出する重心算出部35と、重心に基づいて自車と物体との相対速度を算出する相対速度算出部36とを備えて構成した。セグメント設定部34は、第1セグメントを構成する第1反射点と第2セグメントを構成する第2反射点との間隔が第2所定値未満であり、且つ、第1セグメントと第2セグメントとの相対速度の相関値が第3所定値以上の場合に、同一のセグメントであると認識する。
(もっと読む)
21 - 40 / 83
[ Back to top ]