
Fターム[5J083AG03]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 組合せ (299) | 超音波(音波)探知装置と電波探知装置 (38)
Fターム[5J083AG03]の下位に属するFターム
ソーナーとレーダー (11)
Fターム[5J083AG03]に分類される特許
1 - 20 / 27
キーレスシステム
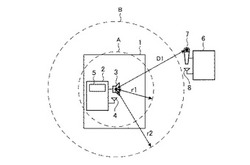
【課題】多数の車内アンテナや車外アンテナを必要とせず、より低コストにより近傍領域判定および車内外領域判定を実施することが可能なキーレスシステムを提供する。
【解決手段】車載機は電波を放射する第1のアンテナと、音波を放射するスピーカと、車とユーザの距離を算出する制御部とを備え、携帯機は第1のアンテナにより放射された電波を受信する第2のアンテナと、スピーカにより放射された音波を受信するマイクとを備え、車載機の制御部は第2のアンテナが第1のアンテナにより放射された電波を受信した電波受信時間およびマイクがスピーカにより放射された音波を受信した音波受信時間とに基づき車とユーザの距離を算出し、算出した車とユーザの距離に基づき携帯機が車内領域、車外近傍領域または車から離れた領域のいずれにあるかを判定するように構成したので、必要な部品数を減らすことが可能となる。
(もっと読む)
単一装置上の位置決定(POD)ならびにPODを利用する自律型超音波位置決定システムおよびその方法

【課題】対象の所在確認および追跡を行う自律型超音波屋内追跡システムを用いて対象の所在確認ならびに位置決定を行なう方法を提供する。
【解決手段】自律型超音波屋内追跡システム(AUITS)200は、RF信号および超音波信号を送信するためのRF送信器205および超音波送信器206を含む移動するタグ装置201と、タグ装置から送信されたRF信号および超音波信号を受信し対象の所在を確認する位置決定機能(POD)202とを備える。PODは複数のリーフモジュールから構成され、各リーフモジュールには位置信号の超音波受信器があり、タグ装置から送信された超音波位置信号を受信する。リーフモジュール間には既知の構造トポロジー関係があり、各超音波受信器からの位置信号検出時間ならびにPODの構造トポロジー関係を利用して、位置計算ユニット210で対象の位置が計算される。
(もっと読む)
パルス抽出負荷低減方法及び探索側端末並びに被探索側端末
【課題】機能等に制限のある端末間で、音波による位置関係推定を行うに際しての相関処理の負荷を低減する。
【解決手段】位置推定開始確認(1)(2)後、探索側端末10は送信する音波パルスを予め設定して(3)、被探索側端末20に通知し(4)、被探索側は録音を開始する(5)。探索側は設定に従う音波パルスを送信する(7)と共に、各パルスの送信時刻を取得し(8)、送信終了を被探索側に伝える(10)。被探索側は録音を終了し(11)、録音に中から、負荷処理を低減した相関処理で受信時刻を求め(12)、受信時刻を探索側に通知する(13)。探索側は受信時刻と送信時刻とから、位置関係の推定を行う(14)。相関処理はウィンドウサイズ、データビット数及びサンプリング間隔を粗く取って1回目に暫定位置を求めてから、2回目に暫定位置周囲でパラメータを細かく取って確定する。
(もっと読む)
超音波測定用プローブの位置検出方法およびその位置検出装置
【課題】超音波測定用プローブ位置の誤検出を防止することができる超音波測定用プローブの位置検出方法およびその位置検出装置を提供すること。
【解決手段】超音波測定用プローブ1の位置に設けられ、超音波測定用プローブ1の位置から2種類の伝搬速度が異なる波動である赤外線および超音波を同時または所定間隔をおいて送波する赤外線送波器11および超音波送波器10と、予め既知の位置に所定の間隔Lを隔てて配置され、前記送波された各波動を受波する複数の受波器15a,15bと、各受波器15a,15bが検出した前記2種類の波動の到達時間差をもとに超音波測定用プローブの位置を検出する演算処理回路と、を備える。
(もっと読む)
位置算出装置、位置算出方法及び位置算出プログラム
【課題】 局所領域ごとに算出された位置座標を1つの座標系に統合する。
【解決手段】 位置算出装置20の局所座標算出部230は、それぞれ複数のセンサから構成される複数の局所領域を検出し、各センサと送受信端末10との間の距離に基づいて、局所領域それぞれにおいて、当該局所領域を構成する複数のセンサの位置座標を算出する。統合領域抽出部241は、複数の局所領域のうち、所定数のセンサを共有する2つ以上の局所領域を、互いに統合可能な領域として抽出する。統合処理部242は、抽出された局所領域それぞれにおいて、センサ間距離及びセンサ間距離の信頼度を算出し、センサ間距離の信頼度によって重み付けを行なって重み付け補正後のセンサ間距離を算出し、前記重み付け補正後のセンサ間距離の加重平均に基づいて、局所領域を統合した座標系における各センサの位置座標を算出する。
(もっと読む)
適応性のある分解能を有する対象測位方法と対象測位システム
【課題】 本発明は、適応性のある分解能で対象を測位する方法およびシステムを提供する。
【解決手段】 検出空間をホットエリアおよび一般エリアに分け、ホットエリアをカバーする検出範囲を有する高解像度位置信号(US)送受信機および空間をカバーする検出範囲を有する低解像度位置信号(RF)送受信機を配置し、空間内で対象が移動すると、高解像度位置信号送受信機と低解像度位置信号送受信機からの検出結果を融合し、適応性のある分解能で対象の位置を決定する。
本発明のシステムにより、異なるエリア毎に、異なる測位分解能(精度または粒度)で対象の位置を決めることができる。また、多くの高精度な測位装置を使用する必要がないので、システムコストは大幅に軽減することができる。
(もっと読む)
面で囲まれる空間内部で作業を行う位置を特定する方法及び作業結果管理装置
【課題】ボイラ火炉等の面で囲まれる空間の内部の検査に用い、さらに複数の位置の検出が可能な容器の内部又は外壁の検査に用いられる位置特定方法及び作業結果管理装置を提供する。
【解決手段】面で囲まれる空間内部で作業を行う位置を特定する方法であって、前記空間内部の作業を行う位置が側壁であり、該側壁に略平行且つ位置座標が既知である同一直線上にない3点以上に音波信号を受信可能な受波器を設置し、前記空間の側壁の作業を行う位置に配置された音波を発信可能な送波器より信号を発信し、前記同一直線上にない3点以上の受波器それぞれに到達する前記信号の到達時間を計測し、前記到達時間と、前記3点以上の受波器の位置座標を用いて、前記送波器の位置座標を特定する
(もっと読む)
送信ペン位置決めシステム
【課題】ペンの尖端の位置を決定するための正確な手段を提供し、送信ペンと外部受信器との間で補足的な情報を通信する手段も備えた送信ペン位置決めシステムを開発する。
【解決手段】ペンが2つ以上の受信位置の外部受信器へ繰り返しの出力信号を送信し、そしてペンの尖端の位置がホワイトボードの書き込み面に対して決定される送信ペン位置決めシステム。出力要素は、単一信号送信ペンから2つ以上の受信位置の2つ以上の外部受信器へ時間従属の出力信号を送信する。各受信位置への出力信号の到達方向が決定され、単一送信ペンの尖端が、ペンから外部受信器への方向ベクトルの交点として決定される。別の実施形態では、トランスジューサが時間従属の出力信号を送信ペンから3つ以上の外部受信器へ送信し、受信信号が処理され、各受信器への到達時間が決定されると共に、ペンの尖端の位置が受信器間の計算された距離として決定される。
(もっと読む)
超音波距離測定装置
【課題】振幅の増減があっても確実に超音波の受信確認が可能な、送信部と受信部間の距離を算出する超音波距離測定装置を提供する。
【解決手段】発信部グループ10の超音波発信部11は、発信時刻になるとともに正負および負正のいずれかの所定の順で超音波の発信を開始するとともに赤外線発信部12を経由して受信部グループ20の赤外線受信部51に発信開始を通知し、受信部グループ20の超音波受信部30は、受信した超音波の半位相の波形に、超音波の半位相分の波形を半位相遅延させて符号反転した波形を加算し、加算された2発目の波形の波高を予め設定されているしきい値と比較し、加算された2発目の波形の波高がしきい値を超えた場合は超音波の受信が確認されたとしてその時刻と、赤外線受信部51によって受信された超音波発信時刻との差を到達所要時間とし、超音波発信部と超音波受信部との距離を算出する。
(もっと読む)
TOA(到達時刻)とRSS(受信信号強度)の融合による適応型測位法、装置、およびシステム
【課題】適応性、信頼性、高精度、拡張性、低コストな、適用型測位方法、装置、およびシステムを提供する。
【解決手段】対象から発信された信号のTOA結果およびRSS結果を収集する観測結果収集器と、収集されたTOA結果の数を決定するTOA結果カウンタと、入力されたTOA結果の数に基づいて移動体の位置計算法を選択し、選択された計算法を使用して移動体の位置を計算する位置計算器とを備える。TOA結果の数に基づいて適応的に適応型測位法を選択することが可能である。
(もっと読む)
位置情報検出システム
【課題】 同時に複数のICタグの位置情報を把握できる位置情報検出システムを提供する。
【解決手段】 無線又は赤外線信号をトリガとして超音波を出力する複数のタグと、これらのタグから出力された超音波が入力されると共に、複数の前記タグから超音波が到達するまでに要した時間を計測する複数の基地局と、これらの基地局から入力される超音波到達時間情報に基づいて、複数の前記タグの位置を把握する管理コントローラを備えた位置検出システムにおいて、
複数の前記タグは所定の周波数の超音波を発生する超音波発生手段を備え、
複数の前記基地局は受信した複数の周波数の超音波を周波数毎に選別する周波数選別手段を備え、
前記管理コントローラは、
複数の前記タグと使用する超音波周波数の対応関係を記憶した管理テーブルと、
複数の前記基地局から入力される超音波到達時間情報から複数の前記タグの位置を、三角測量を用いて計算する制御部と
を備える。
(もっと読む)
車両
【課題】 誤検出することなく前方の車両や物体を検出できる衝突防止用のセンサを備えた車両を提供すること。
【解決手段】 ゴルフカート10に、追突防止センサと障害物センサ33a等を設けた。追突防止センサは、後方に電波aを発信する送信器31と、前方のゴルフカート10aとの距離が一定距離以内になったときにゴルフカート10aの送信器31から発信された電波aを受信する受信センサ32とからなる。障害物センサ33a等は、電波aの発信距離よりも長い距離に亘って前方に超音波bを発信し、物体に衝突して戻ってくる超音波bを受信することにより前方の物体を検出する。そして、受信センサ32が電波aを受信したときにゴルフカート10は停止し、受信センサ32が電波aを受信せず、障害物センサ33a等が物体を検出したときにゴルフカート10は低速走行するようにした。
(もっと読む)
広いスタジオ環境内のカメラの受動的位置特定情報
本発明の一実施形態において、方法は、少なくとも1つのカメラに、複数の受信器によって検出可能な信号を送信するように、少なくとも1つの送信器を設置する段階を含む。複数の受信器は、当該受信器に対するカメラの距離測定のために固定位置に配置され、距離測定の位置特定処理を行う。当該方法は更に、既知の位置にある複数の受信器に基づいて収集されたレンジ測定からのレンジ測定から、送信器からの信号に応答して送信器の移動を指し示すものを検出する段階を含み得る。  (もっと読む)
(もっと読む)
測位システム
【課題】複数の移動局間の距離が測定可能とする場合に、測定された複数の移動局間の距離を用いて移動局の測位の精度の向上する。
【解決手段】測位部による測位結果に基づいて移動局の位置に対する存在確率を算出する存在確率算出部と、第1の測距部よりも高い測距精度を有し複数の移動局間の距離を測定する第2の測距部と、第2の測距部により測定される複数の移動局間の距離に基づいて複数の移動局の位置の組み合わせを抽出する移動局位置抽出部と、前記存在確率に基づいて前記複数の移動局の位置の組み合わせに対応する確率評価値を算出するとともに、最も確率評価値が高い複数の移動局の位置の組み合わせを選択する移動局位置選択部と、測位部による測位結果である複数の移動局位置を移動局位置選択部によって選択された移動局の位置の組み合わせとなる様に補正する移動局位置補正部とを設ける。
(もっと読む)
音響波および電磁波を使用して遠隔デバイスを標定するための方法
遠隔デバイスによって占有される空間領域をその波面が伝搬し、最終的に遠隔デバイスに到達するパルスを音響送信器から放出するステップと、オンボード マイクロフォンにより前記波面が検知された瞬間に、各遠隔デバイスから無線周波数パルスが放出されるステップと、遠隔デバイスから伝搬する無線周波数信号を無線基地によって取得し、それによりi番目の音響源とj番目の遠隔デバイスとの間の距離に比例する到達時間遅延の計算を可能にするステップと、遠隔デバイスの個数に等しい最大長Mを有し、かつ受信時間と推定音速の積として得られる一連の距離で構成される受信ベクトルを、i番目の源による各放出に対し形成するステップとによる遠隔デバイスの標定。N+1個の受信ベクトルを形成するために、上記ステップを全ての音響源に対して繰り返し、そこから導出された行列式を解くことによってデバイスの位置を算出する。 (もっと読む)
位置検出システム
【課題】製造コストの増加を抑えながらも被位置検出装置の位置の情報を位置検出装置から被位置検出装置に送信できる。
【解決手段】位置検出システムは、位置検出対象の移動体に搭載され超音波送波部11を有する被位置検出装置1と、超音波送波部11から送波された超音波を受波する超音波受波部21を有する位置検出装置2とを備え、位置検出装置2はトリガ信号を送信する送信部22を有するとともに被位置検出部1はトリガ信号を受信する受信部15並びに受信部15にてトリガ信号を受信したときに超音波送波部11から超音波を送波させる制御部17を有し、位置検出装置2は、位置検出装置2に対する被位置検出装置1の相対位置を求める位置演算部25と、位置演算部25で得られた相対位置の情報を送信部22から受信部15に送信させる制御部27とを有している。
(もっと読む)
位置検知装置および位置検知プログラム
【目的】この発明は、基地局から複数のアンテナあるいは複数組のアンテナを周期的に切替えながら発信される報知情報と測定信号を含む高周波信号を携帯端末により受信し当該携帯端末の3次元の位置あるいは相互間の距離あるいは相互間の方向を高精度で検知するための位置検知装置および位置検知プログラムに関するものである。
【構成】基地局10の複数あるいは複数組のアンテナ11a〜11dから伝送経路68a〜68dを経由して伝送される高周波信号を携帯端末20により受信し、当該受信した高周波信号の搬送波信号あるいは副搬送波信号あるいは変調信号あるいはベースバンド信号の相対位相を算出することにより、当該携帯端末20の3次元の位置69を高精度で検知する。
(もっと読む)
動線計測システム
【課題】検出対象の位置を追跡するにあたり、受信装置の配置設計および設置施工を容易にしながらも受信装置の座標位置を正確に特定できる動線計測システムを提供する。
【解決手段】送信装置1は、疎密波を間欠的に送波する疎密波送波部11と、電磁波によるトリガ信号を送信するトリガ送信部12とを備える。受信装置2は、疎密波を受波する疎密波受波部21と、疎密波と同時に送信されたトリガ信号を受信するトリガ受信部22とを備える。位置演算部24は、疎密波の到来方向とトリガ信号から疎密波の受波までの時間とを用いて、ローカル座標における送信装置1の座標位置を求め、座標位置を時刻に対応付けて検出対象を追跡する。グローバル座標での座標位置が既知である基準位置に送信装置1を位置させ、位置演算部24で、ローカル座標における送信装置1の座標位置と既知の座標位置とを用いてグローバル座標における受信装置の座標位置を算出する。
(もっと読む)
動線計測システム
【課題】検出対象の位置を追跡するにあたり、定位置に固定する送信装置の設置施工を容易にしかつ受信装置の座標位置を正確に特定できる動線計測システムを提供する。
【解決手段】送信装置1は、疎密波を間欠的に送波する疎密波送波部11を備え定位置に固定される。受信装置2は、疎密波を受波する疎密波受波部21を備える。位置演算部24は、疎密波受波部21で受波した疎密波を用いてローカル座標における送信装置1の座標位置を求め、座標位置を時刻に対応付けて検出対象を追跡する。キャリブレーションモードでは、グローバル座標での座標位置が既知である基準位置に受信装置2を位置させ、位置演算部24ではグローバル座標における送信装置1の位置を算出する。動作モードでは、グローバル座標とローカル座標とにおける送信装置1の位置座標を用いて、グローバル座標における受信装置1の位置を算出する。
(もっと読む)
位置検出システム
【課題】定位置に固定する送信装置の設置施工を容易にしかつ受信装置の座標位置を正確に特定できるようにした位置検出システムを提供する。
【解決手段】送信装置1は、疎密波を間欠的に送波する疎密波送波部11を備え定位置に固定される。受信装置2は、疎密波を受波する疎密波受波部21を備える。位置演算部24は、疎密波受波部21で受波した疎密波を用いてローカル座標における送信装置1の座標位置を求める。キャリブレーションモードでは、グローバル座標での座標位置が既知である基準位置に受信装置2を位置させ、位置演算部24ではグローバル座標における送信装置1の位置を算出する。動作モードでは、グローバル座標とローカル座標とにおける送信装置1の位置座標を用いて、グローバル座標における受信装置1の位置を算出する。
(もっと読む)
1 - 20 / 27
[ Back to top ]