
Fターム[5J083BE25]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | 受信信号の検出 (729) | 複数閾値レベル設定 (18)
Fターム[5J083BE25]に分類される特許
1 - 18 / 18
車両用障害物検知装置
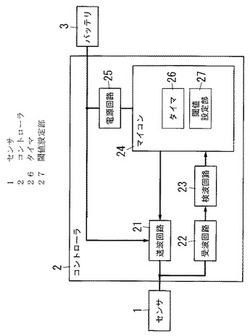
【課題】地面による反射波の影響を受けにくい車両用障害物検知装置を提供する。
【解決手段】車両用障害物検知装置は、超音波を送受波するセンサ1と、センサ1に超音波を送波させるとともに、センサ1が受波した反射波の振幅と閾値とを比較することにより障害物の有無を判断するコントローラ2とを備える。コントローラ2は、センサ1による送波からの時間を計時するタイマ26と、タイマ26が計時する時間に応じて閾値を設定する閾値設定部27とを備える。閾値設定部27は、地面9からの反射波を考慮しない場合の閾値に、検知期間を開始する時刻における地面9からの反射波の影響を除去するための補正値を加えた閾値を設定し、障害物の有無を判断する検知期間内においてタイマ26の計時する時間が経過するにつれて段階的に閾値を小さく設定する。
(もっと読む)
物体検知装置

【課題】応答性が低下することを抑制できる物体検知装置を提供する。
【解決手段】通信線53を介して通信可能に設けられたマスタ装置10とスレーブ装置20,30,40とを備えた物体検知装置である。スレーブ装置20,30,40は、マスタ装置10からの指示に応じて、車両の周辺に検知波を送波し、この検知波が物体によって反射してきた反射波を受波するとともに、反射波に基づいて物体を識別するための複数の情報を測定する。そして、スレーブ装置20,30,40は、測定された複数の情報のうち、マスタ装置10から指示された情報のみを物体を識別するための情報として含む測定結果を送信する。マスタ装置10は、スレーブ装置20,30,40に対して、検知波の送波を指示するとともに、送信させる情報を指示する。
(もっと読む)
死角車両検知システム、死角車両検知装置、死角車両検知方法およびそのプログラム
【課題】死角車両の音源の方向を正確に検知する。
【解決手段】自車両に配置され、車外音を集音する集音部102と、死角車両の回折音の音圧が死角車両の反射音の音圧より大きくなる音圧閾値を保持しており、集音部102で集音された車外音の音圧が音圧閾値より大きいか否かを判定する音圧閾値処理部103と、音圧閾値処理部103で車外音の音圧が音圧閾値より大きいと判定された場合に、集音部102で集音された車外音から、死角車両の音源の方向を検知する車両検知部105と、を備える。
(もっと読む)
探知装置、探知方法、および探知プログラム
【課題】コストや回路規模の増大を抑えながら受信信号を飽和させない探知装置を提供する。
【解決手段】受信信号監視部142は、メモリ17から海底深度に応じた受信信号を読み出し、飽和状態を監視する。例えば、海底深度よりも数サンプル程度浅い深度に対応する受信信号から順に所定サンプル数の受信信号を読み出し、これらのサンプルの最大値が飽和レベルに達したか、あるいは飽和レベルに近づく場合飽和状態であると判定する。送信条件設定部145は、受信信号監視部142で受信信号が飽和状態であると判定された場合、送信信号の条件を変更する。すなわち、送信回路13に対し、次のpingから送信信号の出力を低減する設定を行い、受信信号の飽和を防止する。
(もっと読む)
障害物検出装置
【課題】障害物の検出に影響を与えるようなノイズが到来するのを的確に判断して、障害物の検出を正確に行うことができる障害物検出装置の提供。
【解決手段】超音波を送受信して障害物を検出する障害物検出装置であって、超音波を送信する送信手段と、上記障害物で反射した超音波を受信する受信手段と、上記受信手段における受信信号のレベルとノイズ判定閾値を比較し、上記受信信号のレベルが上記ノイズ判定閾値より大きい場合に、障害物が存在すると判断する障害物検出手段と、上記受信手段におけるノイズレベルが判明しているノイズ発生源がオン状態であるか否かを検出するオン/オフ検出手段と、上記ノイズ発生源がオン状態であるか否かに応じて、上記ノイズ判定閾値の大きさを変更する閾値設定手段とを備える。
(もっと読む)
運転支援装置及び障害物検出方法
【課題】一般的な超音波センサを用いて、温度変化などがあっても正確に車両と障害物間の距離を測定して報知することができる運転支援装置を提供する
【解決手段】車両に取り付けた複数の超音波センサで受信した信号を検波し、隣接する第1、第2の超音波センサの一方から他方に直接伝搬された超音波が他方で受信されるまでの第1の時間情報を算出し、第1、第2の超音波センサ間の距離情報及び第1の時間情報をもとに超音波の伝搬速度を測定する第1の測定部と、複数の超音波センサから発射され障害物で反射された超音波を受信するまでの第2の時間情報を算出し、測定した超音波の伝搬速度と第2の時間情報をもとに障害物までの距離を測定する第2の測定部と、車両と障害物間の距離が予め設定した距離以内になったときに警報を発する警告部と、を具備する。
(もっと読む)
駐車空間検出装置
【課題】水平広角度ソナーを用いても駐車空間の検出精度を高めることができる駐車空間検出装置を提供する。
【解決手段】駐車空間検出装置は、12番の反射波形4wに対応する角検出位置S1を駐車空間Sの走行側の左角の検出位置に設定し、37番の反射波形4wに対応する角検出位置S2を駐車空間Sの走行側の右角の検出位置に設定する。そして、駐車空間検出装置は、双方の角検出位置S1、S2に基づいて駐車空間Sの位置を想定する。
(もっと読む)
音源・振動源の探査方法と音源・振動源探査システム
【課題】音と振動とが同時に観測されたときに、観測された音が観測された振動源の発生する音かどうかを判別することのできる方法とそのシステムを提供する。
【解決手段】マイクロフォンM1〜M5を備えた音圧レベル測定手段11と、振動センサG1〜G4を備えた振動レベル測定手段12とを用いて、音源から伝搬する音と振動源から伝搬する表面波の振動とを同時に測定して、上記音の音圧レベルのデータから得られた音源方向の水平角θと上記振動の振動レベルのデータから得られた振動源方向の水平角θ’の方向とを比較して、観測された音が、音の発生を伴う振動源からの音であるか、あるいは、振動を伴わない音源からの音であるかの判定や、振動源が音を伴わない振動源であるかどうかの判定を的確に行うができるようにした。
(もっと読む)
超音波探知装置
【課題】振動子の数が少なくても、グレーティングローブによる偽像を除去して探知対象物の検出精度を向上させることが可能な超音波探知装置を提供する。
【解決手段】受信ビーム信号形成部9a,9bで形成された2つの受信ビーム信号の位相差を、位相差算出部11で走査角度ごとに算出し、メインローブ受信信号検出部12は、位相差算出部11で算出された位相差の変化態様に基づいて、各走査角度における受信ビーム信号がメインローブで受信された信号かグレーティングローブで受信された信号かを判定し、メインローブで受信された信号に基づく探知対象物の画像を表示し、グレーティングローブで受信された信号に基づく探知対象物の画像を表示しないように制御する。
(もっと読む)
計測器及び刈取機
【課題】計測対象物までの距離を計測する計測器及び該計測器を備えた刈取機の提供。
【解決手段】受信する信号(反射波)に対して2つの閾値V1,V2を設定しておき、信号レベルが閾値V1を越える時間T1と信号レベルが閾値V2を越える時間T2とを検出する。(T1,V1)及び(T2,V2)の双方を通る直線において、信号レベルがゼロとなる時間を求め、求めた時間を反射波の受信時間として決定する。また、決定した受信時間を用いて圃場面に対する刈取部の高さを算出し、算出した高さに基づいて刈高さの調整を行う。
(もっと読む)
物体計測装置
【課題】送出した超音波の反射信号に基づいて計測対象物の幅を計測する。
【解決手段】送信制御手段3の制御に従い、所定の異なる周波数の送信信号を送出する送信手段1と、計測対象物により反射されて生じた反射信号を検出する複数の受信手段2と、反射信号ごとの受信方向角を算出する受信方向検出手段4と、計測対象物との距離を算出する距離算出手段5と、送信信号のうち第1周波数の送信信号に対する第1反射信号を抽出するとともに記第1周波数よりも低い周波数の第2周波数の送信信号に対する第2反射信号を抽出する反射信号抽出手段6と、第1反射信号に基づいて算出された受信方向角θ1及び距離d1と、第2反射信号に基づいて算出された受信方向角θ2及び距離d2とに基づいて計測対象物の物体幅を算出する物体幅算出手段7とを有する。
(もっと読む)
車両と対象物体との距離を求める装置および少なくとも2つの送受信手段の間隔を求める方法
【課題】信号を送信し対象物体から反射したエコーを受信する送受信手段と、反射エコーの受信信号に基づき距離d1,d2,k,x,yを求める電子ユニットを用いて、車両と対象物体との距離を求める際、各送受信手段の間隔を少なくとも同じ精度を維持しながらいっそう簡単に捕捉できるようにする。
【解決手段】電子ユニットは、送受信手段の種々の感度で、および前記対象物体に対し一定の距離で、反射エコーの受信信号を捕捉し、種々の感度で受け取った受信信号に対し平均値を形成する。
(もっと読む)
超音波センサ信号処理システム
【課題】 ブラインドタイムを設ける必要がなく、反射波の波形が重なり合う場合や、パルス発生器から対象物までの距離が遠い場合、近距離であっても反射率の小さい対象物の場合でも、正確に反射波を検出できる超音波センサ信号処理システムを提供する。
【解決手段】 設定された閾値を越える入力信号を反射波として認識し、反射波信号演算部4に該反射波信号を送る反射波認識部2と、反射波認識部2が反射波と認識した時点の入力信号の最大振幅値を検出する最大振幅値検出部3と、閾値演算設定部5とを備えた超音波センサ信号処理システム1である。閾値演算設定部5は、最大振幅値検出部3により検出された最大振幅値に基づいて設定した閾値を、所定の時間毎に超音波センサ信号の減衰曲線に近似させた低い値に変更するための演算を行うとともに、該演算により得られた閾値を反射認識部2に設定する。
(もっと読む)
超音波センサ信号処理システム
【課題】 リアルタイム処理が可能で、しかも、ダイナミックレンジの広い超音波センサ信号処理システムを提供すること。
【解決手段】 超音波センサ素子からの入力信号を増幅させるプリアンプ2と、BBD素子を多段接続し、プリアンプ2から入力した信号を、遅延加算演算を行う各角度毎に所要の時間遅延して出力するBBDブロック3と、BBDブロック3から出力された各角度毎の信号を加算演算する加算器4と、加算器4から出力された信号のピーク値を検出するピークホールド回路5と、ピークホールド回路5から出力された信号と、基準電圧発生器6より供給される基準電圧の閾値とを比較する比較器7とで構成される超音波センサ信号処理システム1である。BBDブロック3の前に配置するプリアンプ2には、入力信号の受信音圧レベルに応じてゲインを変化可能なプリアンプを用いる。
(もっと読む)
超音波計測回路およびそれを用いた液面検出装置
【課題】 検出対象から反射される反射波の検出に際しノイズの影響を低減し、検出対象の位置をより正確に計測することが可能になる超音波計測回路およびそれを用いた液面検出装置を提供する。
【解決手段】 検出対象に対して超音波センサ3より超音波を発射し、検出対象から反射される反射波を検出して検出対象の位置を計測する超音波計測回路であって、
超音波センサ3に対し超音波を発射させる駆動信号を与える送信回路110と、
超音波センサ3で受信される受信信号の中から反射波に相当する反射波信号を検出する受信回路120とを備え、
受信回路120は、駆動信号の発生時点から反射波を受信するよりも短い期間だけ、受信信号の信号レベルもしくは受信信号の判定レベルを変更する調整手段124を有することを特徴とする。
(もっと読む)
測距センサ及びその設定方法
【課題】距離測定および検出対象物の有無検出が可能で、ユーザが所望の態様に設定を容易に変更可能とする。
【解決手段】測距センサは、変位表示部における表示及び動作パターンの異なる複数の検出モードが予め用意されており、複数の検出モードのいずれかを設定部で選択し、選択された検出モードに応じて各設定項目の設定を行う設定モードと、設定された検出モードに従い表示値を表示する表示モードとを備えている。さらに測距センサは、変位表示部における表示を、表示モードと、検出モードの選択及び/又は検出モードの設定を行う設定モードとに切替可能なモード切替部を備える。この構成により、測距条件に応じた検出モードを選択して最適な測距及び出力を行うことができ、柔軟な表示および制御が可能となる。
(もっと読む)
水中航走体の位置計測システム及び、位置計測方法
【課題】 水中航走体から発せられるピンガ信号を正確に受信するとともに、受信したピンガ信号について信号か残響によるノイズかを判別し、水中航走体の位置を算出する位置計測システムを提供する。
【解決手段】 水中航走体から所定の時刻で深度情報を含んだ第1及び第2パルスからなるピンガ信号を発信し、このピンガ信号を複数の計測ブイで受信し、計測ブイの位置情報とともに計測装置へ送信する。計測装置では所定の時刻からの伝搬時間から距離を求め、水中航走体の深度情報と、計測ブイの位置情報とに基づき、水中航走体の正確な位置を算出する。
(もっと読む)
障害物検知装置
【課題】 異常発生を誤って報知する回数を少なくするとともに、速やかに異常発生を報知することができる。
【解決手段】 S200、及びS300における異常判定時間(A、B)は、各々時間長さが異なるように設定される。すなわち、センサ11〜16と最初に(初回に)通信を行う場合の異常判定時間(A)は、初回に通信を行って正常に通信が行われた後に通信を行う場合の異常判定時間(B)よりも短い時間(A<B)となるように設定される。
(もっと読む)
1 - 18 / 18
[ Back to top ]