
Fターム[5J083CA07]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 送受波器(センサ) (1,888) | 受波器のみ (84)
Fターム[5J083CA07]の下位に属するFターム
水中聴音器 (17)
Fターム[5J083CA07]に分類される特許
21 - 40 / 67
音声ガイド装置および音声ガイドシステム
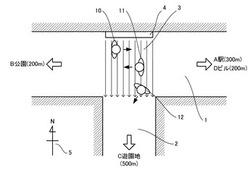
【課題】目的地がそのときの利用者の向いている方向に対してどちらの方向にあるかを音声で案内する音声ガイドシステムを提供する。
【解決手段】街路の交差点に案内板4を設置する。案内板4は、複数のガイド対象物のカテゴリ、方向を含むガイド情報を超音波帯域で特定方向に送信する。通行人10、11、12は、それぞれ受信装置であるガイド端末を装着している。ガイド端末は、利用者(通行人)から所望のカテゴリの選択を受け付ける。また、ガイド端末は、超音波のガイド情報の到来方向に基づいて自装置(通行人)の向いている方向を検出する。ガイド端末は、受信したガイド情報のなかから利用者所望のカテゴリのものを選択し、そのガイド対象物の方向と利用者の向いている方向との差(相対方向)を表す文言を合成して再生する。
(もっと読む)
受信装置および音声ガイドシステム

【課題】利用者が向いている方向にある施設のガイド情報を音声で案内する音声ガイドシステムを提供する。
【解決手段】街路の交差点に案内板4を設置する。案内板4は、各方位別のガイド情報を超音波帯域の複数チャンネルで特定方向に送信する。通行人10、11、12は、それぞれ受信装置であるガイド端末を装着している。ガイド端末は、超音波のガイド情報の到来方向に基づいて自装置(通行人)の向いている方向を検出し、複数チャンネルからその方向のチャンネルを選択して、受信・再生する。これにより、通行人が向いている方向の施設等を案内するガイド情報を自動的に再生することができる。
(もっと読む)
音源方向推定装置及び方法
【課題】音源方向推定装置において、高い精度で音源の方向を推定可能とする。
【解決手段】音源方向推定装置は、互いに異なる位置に設けられており、移動する音源が発する音を検出する第1及び第2音検出手段(110,120)と、第1音検出手段において音が検出される時間及び第2音検出手段において音が検出される時間の差を、時間差データとして算出する時間差算出手段(130)と、時間差データに対して移動平均処理を行う移動平均処理手段(160)と、移動平均処理が行われた時間差データと、第1及び第2音検出手段間の距離とに基づいて、音源の方向を推定する方向推定手段(180)とを備える。
(もっと読む)
複数信号区間推定装置とその方法と、プログラムとその記録媒体
【課題】複数音源が同時に存在している場合にも頑健な信号区間検出を行う。
【解決手段】この発明の複数信号区間推定装置は、周波数領域変換部と、音声存在確率推定部と、到来方向推定部と、到来方向確率計算部と、乗算部とを具備する。音声存在確率推定部が各フレームにおける音声存在確率を計算する。到来方向推定部と到来方向確率計算部とが、各フレームの全ての周波数における音声到来方向確率を推定する。そして、乗算部が音声存在確率と音声到来方向確率を乗算した値を、全ての音源について、発音確率として出力する。これにより各フレームにおいて複数の音源の存在を許せるようになるため、欠損の少ない区間検出が可能になる。
(もっと読む)
物体の表面上の衝撃位置を決定する方法
【課題】衝撃により生成された音響信号の解析に基づき物体の表面上の衝撃位置を決定する方法を提供する。
【解決手段】物体の境界での反射によるスプリアス寄与分を考慮するために音響信号を重み付けする信号処理工程を含み、前記重み付けは時間領域において行なわれる。
(もっと読む)
音源探査システム
【課題】システムのコストを削減することが可能な音源探査システムを提供する。
【解決手段】本発明の音源探査システムは、音源探査対象空間を撮像する撮像装置200と、複数のマイクロフォンが所定配置で設けられてなるマイクロフォンアレイ300と、前記マイクロフォンアレイ300との相対位置関係が変更しないマーカー部310と、前記撮像装置200による前記マーカー部の撮像画像を解析することによって複数のマイクロフォンそれぞれの位置を演算する演算部100と、前記マイクロフォンアレイを構成する各マイクロフォンで測定された音圧データから音源位置を演算する演算部100と、前記演算部100によって演算された音源位置を可視化した画像と、前記撮像装置200によって撮像される音源探査対象空間の撮像画像とを、重ね合わせて表示する表示装置400とからなることを特徴とする。
(もっと読む)
超音波センサ及び超音波センサアレイ、これらを備えた超音波検出装置
【課題】機械的感度と光学的感度を両立させることによって、高感度化および広帯域化を同時に図ることができ、アレイ化が容易となる超音波センサ及び超音波センサアレイ、これらを備えた超音波検出装置を提供する。
【解決手段】超音波センサであって、
基板上に設けられ、超音波によって変位する可動部を含み構成される超音波受信部と、
前記超音波受信部に設けられた第1の反射膜と、前記基板上に保持された第2の反射膜とを、非固体媒質を介し対向配設して構成される共振器と、
を備え、前記超音波による可動部の変位を、該可動部の変位に応じた前記第1及び第2の反射膜間の相対距離の変化に基づく光学応答によって、検出する構成とする。
(もっと読む)
位置検出システム及び位置検出装置
【課題】ユーザに負担を強いることなく、ユーザが音源の位置を把握できるようにする。
【解決手段】位置検出装置100a,100bは、2つのマイクロホンアレイ108によって音源Oから到来した音の収音を行い、各マイクロホンの収音時期のずれを利用して、音の到来方向を特定する。さらに、位置検出装置100a、100bは、両者のマイクロホンアレイ108間の距離と、それぞれのマイクロホンアレイ108によって特定された音の到来方向とに基づいて、船舶S(音源O)までの距離を算出する。このような構成によれば、ユーザは煩雑な操作を行わなくても、位置検出装置100は船舶Sの位置を求めることができるので、ユーザに対して負担を強いることなく、ユーザは船舶Sの位置を把握することができる。
(もっと読む)
少なくとも2個のインパクトの位置を決定するための方法
【課題】1個以上のセンサーを使用して、表面上の少なくとも2個のインパクトの位置を決定するための方法。
【解決手段】インパクトF1とF2は1個以上のセンサーによって検知される信号を発生し、各センサーは検知信号si(t)、i=1〜n(nはセンサーの数)を供給する。振幅の異なる同時のインパクトを決定できるために、上記方法は、1個のインパクトの位置xを特定するステップと、各々の検知信号si(t)と位置jにおける基準インパクトRjに対応する所定の基準信号rij(t)の比較、特に相関に基づく、上記特定されたインパクトによる寄与分が減少される各センサーの修正検知信号si’(t)を決定するステップとを有する。また、検知信号のカップルに基づいた方法と装置に関係する。
(もっと読む)
車両の衝突識別方法および車両の衝突識別のための制御装置
本発明は、音波センサ装置の信号に基づいて衝突を識別する、車両の衝突識別方法および車両の衝突識別のための制御装置に関する。本発明によれば、音波信号のマルチパス伝搬の評価に基づいて車両の衝突位置が求められる。  (もっと読む)
(もっと読む)
目標運動解析方法及び装置
【課題】観測体の変針時の速力センサ誤差やジャイロセンサの誤差に起因する観測方位のバイアス誤差が存在する。
【解決手段】目標体から放射される音波の到来方位を音響センサにより時系列的に観測した時系列観測方位データを用いて、観測体の、観測時刻、目標体に対する観測方位、位置座標東西成分、位置座標南北成分、速力東西成分、および速力南北成分を入力し、音響センサ固有のバイアス誤差と音響センサを搭載する観測体の向きに基づくバイアス誤差とに対応するバイアス誤差成分に関する複数のインデックスを設定し、これらに基づいて、バイアス誤差成分および目標体の運動ベクトルを推定する。
(もっと読む)
音源方向推定装置およびこれを用いた音源分離装置、ならびに音源方向推定方法およびこれを用いた音源分離方法
【課題】 反射音等の残響の影響を受けることなく、希望の音源の方向を特定する。
【解決手段】 左右のディジタル音響信号l(n)およびr(n)が、音源方向推定部26に入力される。音源方向推定部26は、これらのディジタル音響信号l(n)およびr(n)に対して両耳聴モデルに従う処理を施すことによって、音源の方向を推定する。併せて、各ディジタル音響信号l(n)およびr(n)の入力パワーPdが、パワー検出部24によって検出され、この入力パワーPdの立ち上がりが、立ち上がり検出部34によって検出される。そして、入力パワーPdの立ち上がりが検出されると、音源方向特定手段30が、その時点での音源方向推定部26による推定方向[φe,ψe]を、真の音源方向[φs,ψs]として特定する。つまり、各マイクロホン12および14に最初に到達した音の方向が、音源方向[φs,ψs]として特定される。
(もっと読む)
音波を放出するターゲットの方位測定方法
複数の電気音響変換器(11)を有する細長い水中アンテナ(10)によって、音波を放出するターゲットの方位を測定するための方法を提供する。本方法では、前記電気音響変換器(11)の受信信号から、水中の測定された音速値(Cmess)を使用して方位選択的に、前記ターゲットの水平方向のターゲット方位を求める。このような水中アンテナに付随して、とりわけ方位角が大きくなると方位測定結果に誤りを生じさせる原因となるシステム的な方位測定誤差を補償するため、音波伝搬モデルによって、前記ターゲット方位(βZk)によって予め決定されている音波伝搬方向での音波ビーム経過を計算し、該音波ビーム経過から、推定されたターゲット距離およびターゲット深度で、アンテナ位置における垂直方向の音波入射角(γk)を求める。垂直方向音波入射角(γk)から補正係数を導出し、該補正係数と前記測定された音速値(Cmess)とを乗算することによって該音速値(Cmess)を補正する。補正された前記音速値(Ceinstell)によって再び方位測定を行い、改善されたターゲット方位(βZk)を得る。  (もっと読む)
(もっと読む)
曳航式ソーナーの整相装置、整相方法及び整相プログラム
【課題】曳航アレイが非直線状になっても整相方位を地図上で固定できるとともに、整相方位を容易に特定できる、曳航式ソーナー等を提供する。
【解決手段】コンパス341〜34nが受波器211〜21nの位置の偏移量を計測し、その偏移量に基づき座標算出回路35が受波器211〜21nの座標(x1,y1)〜(xn,yn)を算出する。そのため、受波器211〜21nが直線状に並んでいなくても、受波器211〜21nの位置が座標(x1,y1)〜(xn,yn)として正確に捉えられる。そして、それらの座標(x1,y1)〜(xn,yn)に基づき遅延量算出回路36は受波器211〜21nが特定の方位からの音波S1〜Snを受信するように遅延量t1〜tnを算出し、これらの遅延量t1〜tnになるように整相回路371〜37nは受波器211〜21nで変換された電気信号s1〜snの位相φ1〜φnを整える。
(もっと読む)
音声到来方向推定・ビームフォーミングシステム、移動装置及び音声到来方向推定・ビームフォーミング方法
【課題】移動する音源から発せられる音声の到来方向をリアルタイムに推定するとともに、該音声についてリアルタイムにビームフォーミングを行う。
【解決手段】音声到来方向推定・ビームフォーミングシステム1が音源2から受信した音声をフレーム毎に短時間フーリエ変換し、現在のフレームについての受信信号ベクトルを取得し、該受信信号ベクトルを用いて、現在のフレームの一つ前のフレームまでの相関行列を更新して、現在のフレームまでの相関行列を算出する。そして、音声到来方向推定・ビームフォーミングシステム1が該現在のフレームまでの相関行列に基づいて、MUSICスペクトルを算出し、該MUSICスペクトルに基づいて、音声の到来方向を算出する。また、上記短時間フーリエ変換によって得られた受信信号ベクトルと到来方向とに基づいて、ビームフォーミング処理を行う。
(もっと読む)
音源定位・同定装置
【課題】音源定位と音源同定の2つの機能の実装を容易化するとともに、実用的な演算速度を実現可能な音源定位・同定装置を提供する。
【解決手段】音源の方向を識別する音源定位部8と、音源の種類を識別する音源同定部9とを備え、音源定位部8と音源同定部9とは、いずれも、複数のパルスニューロンモデルを備えたニューラルネットワークにより構成され、各パルスニューロンモデルは、ディジタル回路により構成されている音源定位・同定装置1。
(もっと読む)
物体追跡装置
【課題】 超音波信号を使用する物体追跡に関する。送信機から送信された信号を受信する受信機を提供する。
【解決手段】 受信機は、受信された信号に基づいて少なくとも2つの解析信号を形成する少なくとも2つの受信素子を使用する。受信機は、位相検出器などの検出器を有し解析信号を評価して解析信号間の差に関する表示を形成する。表示は、たとえば解析信号間の位相差を示す。送信された信号は、変調超音波信号であり、受信機はその信号を復調し変調信号を回復させる。表示を使用して追跡対象物体の方向角情報を決定することができる。方向角情報は、送信機に対する物体の方向でもよい。方向角情報を使用して、たとえば聴取用に形成される音声信号の補正処理を行うことができる。
(もっと読む)
音源方向推定装置、音源方向推定方法、及びコンピュータプログラム
【課題】マイクロホンからの音入力中に周囲雑音が存在する場合であっても、音源の存在方向を高精度で推定することができる。
【解決手段】複数方向に存在する音源からの音響信号が複数チャンネルの入力として受け付けられ(S301)、周波数軸上の信号に変換される(S303)。変換された周波数軸上の信号の位相成分が同一周波数ごとに算出され、複数チャンネル間の位相差分が算出される(S304)。一方、変換された周波数軸上の信号の振幅成分が算出され(S305)、算出された振幅成分から雑音成分が推定される(306)。振幅成分及び雑音成分に基づいて周波数ごとのSN比が算出され(S307)、SN比が所定値よりも大きい周波数が選択される(S308)。選択された周波数の位相差分に基づいて到達距離の差分が算出され(S310)、目的とする音源が存在すると推定される方向が算出される(S311)。
(もっと読む)
方位角検出装置
【課題】方位角検出において方位角に含まれる誤差をなくす。
【解決手段】信号検出部において信号到来方位角検出時のパラメータである周波数と位相差を検出し、周波数と位相差と信号到来方位とが登録されている位相差テーブルと信号検出部の出力である周波数と位相差を照合し、信号到来方位を検出する。
(もっと読む)
受音装置と音声認識装置とそれらを搭載している可動体
【課題】 受音装置で受音した音源の存在方向を周囲に知らせる表示器を備えた受音装置を提供する。
【解決手段】 高い指向性を持つ方向(受音方向)を調整可能なマイク20と、マイク20で受音した音源が存在する方向を検出する音源方向検出部101と、検出した音源の存在方向とマイク20の受音方向を、ロボット1の周囲から視認可能に表示する表示器10を備えている。周囲にいる人間が、受音装置で受音している音源がいずれであるのかを理解することができる。
(もっと読む)
21 - 40 / 67
[ Back to top ]