
Fターム[5J084AD03]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 反射光のレベル検出 (111)
Fターム[5J084AD03]に分類される特許
21 - 40 / 111
光学式検出装置、表示装置及び電子機器
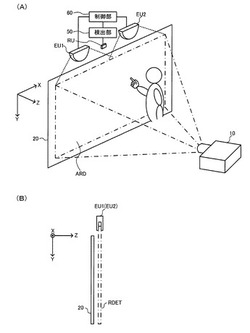
【課題】広い範囲での対象物の位置検出が可能な光学式検出装置、表示装置及び電子機器等の提供。
【解決手段】光学式検出装置は、照射方向に応じて強度が異なる第1の照射光を放射状に出射する第1の照射ユニットEU1と、照射方向に応じて強度が異なる第2の照射光を放射状に出射する第2の照射ユニットEU2と、第1の照射ユニットEU1からの第1の照射光が対象物に反射されることによる第1の反射光と、第2の照射ユニットEU2からの第2の照射光が対象物に反射されることによる第2の反射光を受光する受光部RUと、受光部RUでの受光結果に基づいて、対象物の位置を検出する検出部50を含む。
(もっと読む)
方向検知デバイスおよび電子機器

【課題】被検知対象物の2軸に関する移動方向を検知する方向検知デバイスであって、安価である方向検知デバイスを実現する。
【解決手段】方向検知デバイス100は、被検知対象物106を検知するための検知信号を出力する発光部105Dと、検知信号が被検知対象物106にて反射されて得られた反射後検知信号が入力されるとともに、そのそれぞれが、3つの異なる出力A〜Cを出力する受光部105A〜105Cと、判定信号A〜Cの論理積を求めることによって、判定信号Dを生成する論理積回路102と、判定信号A〜Dに基づいて、被検知対象物106の、X軸およびY軸の2軸に関する移動方向を検知する判定装置103と、を備える。
(もっと読む)
検知装置
【課題】車両側方の道路の区画線を、道路の継目等を通過した場合においても検知可能な、ロバスト性に優れた検知装置を提供する。
【解決手段】車両が現在、道路の継目位置を通過中であるか否かを判定し、継目位置を通過中であるか否かで方法を変えて道路の区画線を検知する。特に継目位置通過中の場合は、車両側方に複数の走査線からなる検知波を照射し、路面からの反射波において全ての走査線の反射強度の積を算出して、区画線部分とそれ以外の領域での反射強度の差を大きくして、区画線位置を検知する。
(もっと読む)
電子機器、閾値調整方法及びプログラム
【課題】ユーザの接近を検出するセンサを搭載した電子機器の省電力機能において、在席離席判定に用いる閾値をユーザの状態に応じて自動的に調整して設定できるようにする。
【解決手段】電子機器は、対象物に向けて光を発射し反射した光の受光量を検出する光検出手段と、光検出手段による検出結果及び所定の閾値に基づいて、ユーザが電子機器の位置から所定の範囲に存在するか否かを判定する存在判定手段と、存在判定手段による判定結果に基づいて、標準モードと省電力モードとの切り替えを行う省電力制御手段と、ユーザが電子機器の位置から所定の範囲に存在している状況における検出結果に基づいて、所定の閾値を更新する閾値更新手段と、を有する。
(もっと読む)
レーザセンサ装置
【課題】簡単な構成で、装置の姿勢変化を検出できるようにする。
【解決手段】装置本体ケース2には、侵入検出用レーザ照射口11の反対側にレーザ通過口12が形成されている。建物の壁14におけるレーザ通過口12と対向する部位には姿勢変化検出用シール3が装着される。レーザ照射部5から照射されたレーザ光は、回転ミラーで展開され、レーザ通過口12を通してシール3をスキャンしてレーザ受光部6により受光される。制御装置10は、レーザ通過口12を通して戻ってくるレーザ光がレーザ受光部6で受光されると、このレーザ受光パターンを当該展開周回とこれ以前での展開周回とで比較し、同じであれば姿勢変化無しと判断し、異なれば姿勢変化有りと判断する。
(もっと読む)
障害物検知装置及び障害物検知方法
【課題】電線のような細い障害物であっても、これを適切に検知し、その高さから障害物と移動体の衝突可能性を判定する。
【解決手段】光源11、12はそれぞれ点光源であり、鉛直方向に対して傾いた角度をなす面状に発散する照射光111、121をそれぞれ発する。障害物100が線状であれば、この光って見える箇所は、照射光111のなす面と障害物100との交点、照射光121のなす面と障害物100との交点の2箇所であり、どちらの箇所も点状であるため、これらは輝点として見える。撮像部20は、少なくとも2つの輝点が視野に入り、これらが認識できるように設定される。これらを撮像した2次元画像中における2つの輝点の位置及びこれらの間の間隔から、制御部30は、光源11、12から障害物100の高さを算出し、移動体の最大高さとの関係から障害物100と移動体との衝突可能性を判定する。
(もっと読む)
レーザセンサ及びこれを用いた検出対象判定方法
【課題】レーザセンサを用いて検出対象を検出したときに検出対象が分離して認識されても、これらが一体のものか否かを判定することができるレーザセンサ及びこれを用いた検出対象判定方法を提供する。
【解決手段】検出対象領域6に対してレーザ光を出射するレーザ光出射部2と、検出対象7a、7bからの反射レーザ光を受光して受光情報を出力する受光部3と、受光情報を一時的に記憶する記憶部5と、受光部3及び記憶部5の少なくとも一方から受光情報を受け取り、受光情報が歩行者又は車両のいずれのカテゴリに属するかを判定条件に基づいて判定する判定部4とを備え、判定条件は、受光情報に基づき、対応する検出対象7a、7bの大きさを判定するための大きさ判定基準と、前回の走査周期と今回の走査周期にて得られた受光情報に基づき、同一の検出対象7a、7bの移動距離を判定するための移動距離判定基準を含む。
(もっと読む)
物体認識装置、プログラム
【課題】様々な大きさの物体を精度よく検出する物体認識装置及びプログラムを提供する。
【解決手段】受光信号の受信強度分布をセグメント化し(S110〜S130)、セグメントが過大セグメントである場合に、セグメントのピークの受信強度Apに、物体までの距離に応じて近距離であるほど小さな値となる閾値係数αを乗じることで領域抽出閾値THaを求め(S140〜S200)、その領域抽出閾値THaより信号強度が大きいセグメント内の領域の幅を、セグメントが表す物体の幅に設定する(S210)。これにより閾値係数α(ひいては領域抽出閾値THa)が大きくなる遠距離では、ビームのすそ野部分の影響が極力排除されるため、物体の幅が過大に検出されることがなく、閾値係数αが小さくなる近距離では、すそ野部分の一部を物体が存在する領域として取り込むことになるため、端ビームが無視されても物体の幅が実際より小さく検出されることがない。
(もっと読む)
光検出装置及び電子機器
【課題】誤検知を起こすおそれが低い高性能の光検出装置を提供する。
【解決手段】本発明に係る光検出装置1は、供給される電流に応じた強度の光を出射するLED2と、LED2が出射した光であって、被照射物により反射された光を受光するフォトダイオード3と、フォトダイオード3が受光した光の量が予め設定された設定値と同一になるか又は当該設定値を越した場合に、LED2からフォトダイオード3までの光の経路の途中に被検出物が存在すると認定し、フォトダイオード3が受光した光の量が当該設定値未満である場合に、LED2からフォトダイオード3までの光の経路の途中に被検出物が存在しないと認定する、認定部21と、被検出物が存在しないと認定部21が認定した場合に、LED2に供給される電流の値を当該電流の値よりも大きい値に変更するスキャン処理を行う処理部22と、を備えている。
(もっと読む)
距離画像取得装置
【課題】ファイババンドル型イメージガイドの屈曲に起因して距離画像の各画素間に相対的な誤差が生じることを抑制することが可能な距離画像取得装置を提供する。
【解決手段】距離画像取得装置1は、可撓性外装体3と、光源21と、第1光ガイドファイバ7と、第2光ガイドファイバ9と、反射光を受光し、基端面11Tから出射させるファイババンドル型イメージガイド11と、光源21の出射光の光行路を変更し、自己校正光21Eとしてファイババンドル型イメージガイド11に入射させる光行路変更部材15と、第1光伝搬遅延時間に対応する第1出力信号を出力する距離画像センサ23と、測定対象物33の距離画像を演算する信号処理部25とを備える。信号処理部25は、自己校正光21Eを受光した距離画像センサ23の第2出力信号に基づき、第2光伝搬遅延時間を演算し、これに基づき複数の画素ごとに距離画像を校正する。
(もっと読む)
過冷却浮遊水滴のための飛行中に働く複数視野の検出器
【課題】本装置は、浮遊水滴の存在を検出し、かつ、レーザビームが雲を貫通したとき、そのビームの横方向散乱を測定することによって、それら水滴の直径のプロファイルを反映した情報を提供する。
【解決手段】飛行中に働く複数視野の水滴センサは、照射部と検出部とを備える。照射部は、光ビームを出力するように構成された、第1の光学的ビームエミッタを備える。検出部は、後方散乱光の第1の部分を、サークルツウライン変換器の内側反射面に向けて導くように構成された万華鏡と、サークルツウライン変換器によって反射された光を受光するように構成された、少なくとも第1の検出器を有する複数視野のサブシステムと、後方散乱光の第2の部分を受光するように構成された単一視野のサブシステムとを備え、第2の部分は、サークルツウライン変換器によって反射されていない。単一視野のサブシステムは、単一視野中の情報に基づき、液体水滴と氷晶の間を区別するためのデュアルチャネル円偏光検出器を備えることができる。
(もっと読む)
空間情報検出装置
【課題】環境光や周囲光の影響を受けることなく物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
空間情報検出装置
【課題】物体の反射率にかかわらず物体までの距離が測定可能範囲外であるときに検出した空間情報を無効にすることで誤検出を防止する。
【解決手段】発光源1が対象空間に投光し、受光センサ2では規定の受光期間の電荷を集積し、さらに受光期間よりも長い蓄積期間に亘って蓄積した電荷を取り出す。発光源1の光出力は、2値の信号値の継続期間がそれぞれ単位期間の整数倍の期間となるように蓄積期間において乱数的に発生させた方形波信号で変調される。受光センサ2の受光期間は、変調信号に基づいて生成されたタイミング信号で規定される。距離演算部6は、タイミング信号に対応する電荷量を用いて物体までの距離を算出する。正誤判断部7は、2種類のタイミング信号を用いて得られる2種類の電荷量の差分を正規化して評価値に用い、評価値を用いて物体までの距離が測定可能範囲外と判断したときに空間情報を無効にする。
(もっと読む)
光測距装置
【課題】霧などの外乱の中に測定対象物が存在する場合であっても、この測定対象物を見落としなく検出できる光測距装置を提供する。
【解決手段】受光素子の検出信号のレベルが閾値に到達した時点を受光タイミングとして検出する立上がり回路と、受光素子の検出信号をフィルタリングした後の信号のゼロクロス点を受光タイミングとして検出する共振回路とを備え、前記立上がり回路の閾値を、霧などの外乱からの反射光について受光タイミングを検出しないように設定する。そして、両回路が同じ受光タイミングを検出した場合には、光量に基づいてより高い精度を示す回路を選択して距離データを出力させる。また、共振回路による受光タイミングの検出の後で、立上がり回路が受光タイミングを検出した場合は、立上がり回路で検出された受光タイミングを選択して、距離データを出力させる。
(もっと読む)
情報処理装置および物体検出方法
【課題】1組の発光素子および受光素子で、物体の存在有無に加えて、物体の距離を検出することを実現した情報処理装置を提供する。
【解決手段】近接センサ25は、1組みの発光素子251および受光素子252によって構成される。レギュレータ25Aは、制御信号に基づき、発光素子251に供給される駆動電力の電圧値を制御する。このレギュレータ25Aを介して、発光素子251の発光光量を所定の周期内において時分割で多段階に切り替え、この切り替えと同期を取って、この所定の周期内における受光素子252による反射光の受光状況を当該受光素子252が出力する検出信号を監視することにより検出し、その検出結果に基づき、物体の存在有無に加えて、物体の距離を多段階に検出する。
(もっと読む)
周辺物体検出装置、周辺物体検出方法
【課題】より正確に周辺物体を検出することができる周辺物体検出装置、周辺物体検出方法を提供する。
【解決手段】周辺物体検出装置1は、所定周期で強度変調された照射光を対象空間に照射する照射手段2と、対象空間において発生する反射光を所定周期内において複数設定された受光期間において受光し、受光された反射光の受光光量に応じた電荷を生成する光電変換手段5と、電荷に基づいて所定周期内の複数の受光期間毎の受光光量を検出する受光光量検出手段と、複数の受光期間毎の受光光量と第一換算式により照射光と反射光の位相差を算出する位相差算出手段と、第二換算式により反射光の輝度を算出する輝度算出手段と、位相差と第三換算式に基づいて周辺物体との相対距離を算出する相対距離算出手段と、輝度が所定閾値以上であって相対距離の一定期間内の変動距離が一定変動距離以下である場合に、周辺物体が虚像であると判定する虚像判定手段とを含む。
(もっと読む)
受光デバイス及びその制御方法
【課題】外光による画素蓄積領域の飽和を防止し信号光のみ分離抽出できるようにすることで、信号光に対するダイナミックレンジを向上させる受光デバイス及びその制御方法を提供し、特殊プロセスを用いず安価で構造が単純な受光デバイスを提供する。
【解決手段】ウェル領域203の表面に電子保持領域204を有し、電子保持領域204に2つの独立した等価な第1、第2正孔保持領域205、206を備える。第1、第2正孔保持領域205、206上に絶縁層215を介して第1、第2制御電極207、208を有し、光に応じてウェル領域203に発生した電子正孔対を、第1、第2制御電極207、208の電圧操作によって、電子保持領域204及び第1、第2正孔保持領域205、206に電子及び正孔を分離し保持させる。第1、第2制御電極207、208に印加する電圧を反転させて電子と正孔を再結合し、残存する電子を信号光の受光出力として取り出す。
(もっと読む)
車両用物体検知装置および車両用走行制御装置
【課題】 霧、雪、雨等の悪環境下でも先行車等の目標物を的確に検知できるようにする。
【解決手段】 統合手段M6は、物体検知手段M3が検知した物体のうち、送信から受信までの時間が悪環境判定時間以上の受信波により検知された物体を各物体間の距離に基づいて目標物として統合し、不検知度判定手段M7は統合手段M6により統合された目標物の不検知度を判定し、システムフェイル判定手段M5は悪環境判定手段M4により霧、雪、雨等の悪環境と判定された場合でも、不検知度判定手段M7で判定した目標物の不検知度が判定閾値以下の場合には物体検知手段M3の出力を継続するので、悪環境下でも物体検知手段M3の出力を一律に中止することなく、ACCシステムM9の作動を継続してその機能を最大限に活かすことができる。
(もっと読む)
物体検知センサ
【課題】簡単に検知状態とすることができる物体検知センサを提供する。
【解決手段】本発明に係る物体検知センサ1Aは、床面Fからの反射波を検出する検出部5と、検出部5が検出した反射波に基づいて床面Fとの間に物体が存在しているか否か判定し、当該判定結果に応じた物体検知信号を出力する検知制御部8と、外部からの指令信号を受信するとともに、当該指令信号に基づいて検知モードを通常検知モードと強制検知モードとに切り替えるためのモード切替信号を出力する受信部6と、通常検知モードにおいては物体検知信号に基づいて物体が存在しているか否かを示すセンサ出力信号を出力し、強制検知モードにおいては物体検知信号とは無関係に物体が存在していることを示すセンサ出力信号を出力する出力部9と、を備えている。
(もっと読む)
車両用物体検知装置
【課題】高反射物体と低反射物体とを精度良く識別して歩行者などの低反射物体の検出が遅れることのないようにした車両用物体検知装置を提供する。
【解決手段】電磁波で水平方向をスキャンして反射レベルが検知しきい値を超える反射波に基づいて物体を検出すると共に(S10)、レイヤで反射レベルが検知しきい値より高く設定された高反射物検知しきい値を超える高反射波があるか判定し(S14)、肯定されるとき、他のレイヤの検知方向に低反射波があるか判定し(S16)、肯定されるとき、低反射波に相当する低反射物体を高反射波に相当する高反射物体とは別の物体と識別する一方(S18)、否定されるとき、検知しきい値を上げると共に、電磁波のスキャン方向を水平方向から垂直方向に変更させ、高反射物体が検出された場所を除く、その近傍を再スキャンさせ、高反射物体とは別の物体と識別する(S20)。
(もっと読む)
21 - 40 / 111
[ Back to top ]