
検知装置
【課題】車両側方の道路の区画線を、道路の継目等を通過した場合においても検知可能な、ロバスト性に優れた検知装置を提供する。
【解決手段】車両が現在、道路の継目位置を通過中であるか否かを判定し、継目位置を通過中であるか否かで方法を変えて道路の区画線を検知する。特に継目位置通過中の場合は、車両側方に複数の走査線からなる検知波を照射し、路面からの反射波において全ての走査線の反射強度の積を算出して、区画線部分とそれ以外の領域での反射強度の差を大きくして、区画線位置を検知する。
【解決手段】車両が現在、道路の継目位置を通過中であるか否かを判定し、継目位置を通過中であるか否かで方法を変えて道路の区画線を検知する。特に継目位置通過中の場合は、車両側方に複数の走査線からなる検知波を照射し、路面からの反射波において全ての走査線の反射強度の積を算出して、区画線部分とそれ以外の領域での反射強度の差を大きくして、区画線位置を検知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検知装置に関する。
【背景技術】
【0002】
従来から、車両の周囲の情報を検知することにより、自車の置かれている状況を推定し、運転の安全性の向上や自動運転技術の開発に繋げるための提案がなされている。例えば、下記特許文献1では、車両前方に検知波を照射し、その反射波によって領域毎に構造物までの距離データを取得して、その距離に応じて警報を発するシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−157697号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
安全性の向上や自動運転のためには、自車の置かれている状況として、現在、車線の中のどの位置を走行しているか、という情報も重要な情報である。その際には、車両の周囲の情報として、道路の区画線の位置を検知することが目的となる。しかしながら、特許文献1の技術では、車両前方やや下向きに検知波を照射するので、前方車両などが検知波を遮り、区画線の検知が適切に実行できない場合がある。特に車間距離が短い場合には影響が大きい。さらに、車両から距離の離れた位置での区画線を検知するため、現在の車線内の車両位置を正確に検知することが困難である。
【0005】
したがって区画線の検知を適切に且つ正確に実行するためには、自車の前方でなく、側方に検知波を照射して区画線を検知することが適切と考えられる。しかしながら、前方に検知波を照射する場合には、自車の走行する車線の情報を事前に取得及び蓄積することができるため、ノイズや区画線以外からの不要な反射波が存在したとしても、蓄積した多くの情報を活用することにより、区画線のみを検知できる可能性がある。それに対し、車両側方の区画線を検知する場合には、情報の蓄積がない状態で即時に区画線を検知しなければならない。
【0006】
道路(特に高速道路、高架道路)の継目(継ぎ目)部分では、区画線以外の領域が道路アスファルトと異なる材質である、凹凸がある、等の要因により、区画線以外からも不要な反射波が検知され、区画線を検知しにくい。このような状況にも即時対応し、ロバストな区画線位置の検知ができる必要がある。
【0007】
そこで本発明が解決しようとする課題は、上記問題点に鑑み、車両側方の道路の区画線を、道路の継目等を通過した場合においても検知可能な、ロバスト性に優れた検知装置を提供することにある。
【課題を解決するための手段及び発明の効果】
【0008】
上記課題を達成するために、本発明に係る検知装置は、車両に備えられて、車両の側方の路面へ向けて複数の走査線からなる電磁波を照射する発光部と、その発光部から照射された電磁波が路面で反射して形成された反射波を受光する受光部と、その受光部が受光した反射波が反射した路面が舗装部分であるか否かを判定する判定手段と、その判定手段が舗装部分だと判定した場合と舗装部分でないと判定した場合とで異なった方法を用いて、前記受光部が受光した反射波から路面上の区画線を検知する検知部と、を備えたことを特徴とする。ここで舗装部分とは、平坦なアスファルト舗装を指す。
【0009】
これにより本発明に係る検知装置では、車幅方向に電磁波を照射して反射波により道路上の区画線(道路区画線、車線区画線)を検知するので、前方の他の車両などが構造物とならずに区画線検知が行える。さらに、現在走査中の路面が舗装部分であるか否かを判定して、舗装部分である場合と舗装部分でない場合とで異なった方法で区画線を検知するので、道路の舗装部分であるか否かに対応してロバストな区画線検知が実行できる。
【0010】
また前記判定手段は、道路の継目を前記舗装部分でないと判定するとしてもよい。
【0011】
これにより現在走査中の路面が継目であるか否かを判定して、継目である場合と継目でない場合とで異なった方法で区画線を検知する。したがって、道路の継目部分では、区画線以外の領域が道路アスファルトでない等、区画線検知が困難な面があるが、この困難を克服してロバストな区画線検知が実行でき、継目でない部分においても、精度のよい区画線検知が実行できる。
【0012】
また前記検知部は、前記判定手段が舗装部分でないと判定した場合に、前記受光部が受光した反射波の各走査線における車幅方向の同一位置における反射強度の積又は和を算出して、その算出結果が所定の閾値よりも大きい領域を路面上の区画線として検知する第1の検知手段を備えたとしてもよい。
【0013】
これにより道路の舗装部分でない箇所における区画線を検知するために、各走査線の反射強度の積又は和を算出して、算出結果が閾値を超えた領域を区画線として検知するので、継目において区画線部分とそれ以外とで反射強度の差が小さい傾向があっても、積又は和を算出することにより区画線部分とそれ以外とでの反射強度の差が拡大して安定した区画線が検知できる。
【0014】
また前記検知部は、前記判定手段が舗装部分であると判定した場合に、前記受光部が受光した反射波の各走査線における反射強度が所定の閾値よりも大きい領域を前記区画線として検知し、検知した前記区画線の位置の平均を算出するとしてもよい。
【0015】
これにより舗装部分でない場合には、各走査線で反射強度が閾値より大きい部分の平均により区画線位置を算出するので、舗装部分か否かで区画線検知方法を変更して、舗装部分である場合にも高精度に区画線を検知できる。
【0016】
また前記車両から側方へ電磁波を照射して、道路に固定され且つ区画線と平行に設置された構造物である道路構造物を検知する構造物検知部を備え、前記検知部は、前記判定手段が舗装部分でないと判定した場合に、前記構造物検知部が検知した道路構造物の位置と、路面上の区画線との位置関係から、路面上の区画線の位置を検知する第2の検知手段を備えたとしてもよい。
【0017】
これにより道路の舗装部分でない箇所における区画線を検知するために、車両側方の道路に固定され且つ区画線と平行に設置された構造物を検知して、その構造物の位置と路面上の区画線の位置関係とから区画線の位置を検知するので、舗装部分でない箇所では検知波を照射して区画線を検知することを行わずに、より検知しやすい道路側方の構造物の位置を利用して区画線位置を検知する。したがって舗装部分でない箇所を走行中にもロバストに区画線検知が実行できる。
【0018】
また前記構造物検知部は、前記発光部及び受光部と兼用であるとしてもよい。
【0019】
これにより、構造物検知部を発光部及び受光部と兼用とするので、簡素な構造により、道路構造物を利用したロバストな区画線検知が実行できる。
【0020】
また前記判定手段は、反射波の反射強度に対して閾値を設けて、前記受光部が受光した反射波において反射強度が前記閾値を超える区間の総計が所定値よりも大きい場合に舗装部分でないと判定する第1の判定手段を備えたとしてもよい。
【0021】
これにより反射波における反射強度の波形において閾値を超える区間の総計が所定値よりも大きい場合に舗装部分でないと判定するので、例えば継目など舗装部分でない領域においては区画線領域以外でも反射強度が相対的に高い領域が多いことを判定条件に含めることができて、高精度に舗装部分であるか否かを判定できる。
【0022】
また前記判定手段は、車両前方に電磁波を照射する副発光部と、前記副発光部が照射した電磁波が路面で反射して形成された反射波を受光する副受光部と、前記副受光部が受光した反射波を用いて、前記反射波が反射した路面が舗装部分であるか否かを判定する第2の判定手段を備えたとしてもよい。
【0023】
これにより車両前方に電磁波を照射してその反射波から舗装部分であるか否かを判定するので、車両前方に電磁波を照射して舗装部分か否かを判定し、車両側方に電磁波を照射して舗装部分か否かに応じて方法を替えて区画線を検知する。したがって、車両前方と側方への電磁波の照射を有効に使い分けて高精度でロバストな区画線検知が行える。
【0024】
またGPS衛星からのGPS信号を受信するGPS受信部と、路面における舗装部分以外の位置情報を記憶した記憶部と、を備え、前記判定手段は、前記GPS受信部が受信したGPS信号から車両の現在位置を算出し、その現在位置と前記記憶部が記憶する舗装部分以外の位置情報とを参照して、車両の現在位置が舗装部分であるか否かを判定する第3の判定手段を備えたとしてもよい。
【0025】
これによりGPSによる車両位置と、舗装部分の位置情報とから、舗装部分を走行中か否かを判定するので、例えば既存のカーナビシステムを効果的に兼用して、舗装部分であるか否かを判定することが可能となる。
【0026】
また車両とその外部の通信対象との間で無線通信を行う無線通信部と、前記車両の車速を取得する取得手段と、を備え、前記判定手段は、前記無線通信部が前記通信対象から無線通信で取得した舗装部分の位置情報と、前記取得手段が取得した前記車両の車速の情報とから、前記車両の現在位置が舗装部分であるか否かを判定する第4の判定手段を備えたとしてもよい。
【0027】
これにより車両とその外部の通信対象との間の無線通信により舗装部分の位置情報を取得し、それと車両の車速の情報を組み合わせて車両が舗装部分を走行中か否かを判定するので、車両の外部との間の無線通信を利用して舗装部分を走行中か否かを精度よく判定できる。
【0028】
また前記通信対象には前記車両とは異なる車両が含まれるとしてもよい。
【0029】
これにより、自車両とは異なる車両との間の車車間通信を利用することにより、自車両が舗装部分を走行中か否かを精度よく判定できる。
【0030】
また前記通信対象には道路インフラストラクチュアが含まれるとしてもよい。
【0031】
これにより、車両と道路インフラストラクチュアとの間の路車間通信を利用することにより、車両が舗装部分を走行中か否かを精度よく判定できる。
【0032】
また前記道路構造物には道路のガードレールが含まれるとしてもよい。
【0033】
これにより車両側方のガードレールを検知して、その位置情報と路面上の区画線との位置関係から区画線位置を検知するので、舗装部分以外を走行中にも、ガードレールの位置情報からロバストに区画線検知が実行できる。
【0034】
また前記道路構造物には道路の側壁が含まれるとしてもよい。
【0035】
これにより車両側方の側壁を検知して、その位置情報と路面上の区画線との位置関係から区画線位置を検知するので、舗装部分以外を走行中にも、道路の側壁の位置情報からロバストに区画線検知が実行できる。
【図面の簡単な説明】
【0036】
【図1】本発明の検知システムの実施例における平面図。
【図2】検知システムの装置構成を示す図。
【図3】検知処理を示すフローチャート。
【図4】継目判定処理の第1の例を示すフローチャート。
【図5】継目判定処理の第2の例を示すフローチャート。
【図6】継目判定処理の第3の例を示すフローチャート。
【図7】継目判定処理の第4の例を示すフローチャート。
【図8】継目時白線位置算出処理の第1の例を示すフローチャート。
【図9】継目時白線位置算出処理の第2の例を示すフローチャート。
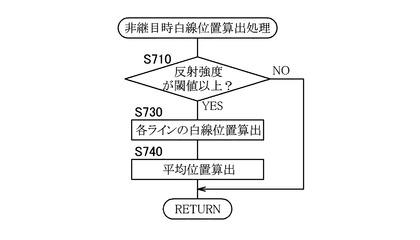
【図10】非継目時白線位置算出処理の例を示すフローチャート。
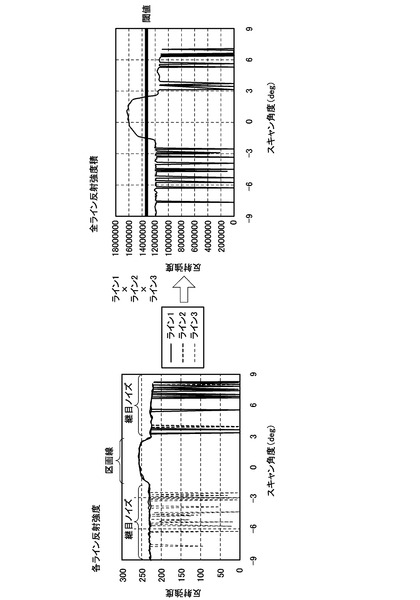
【図11】反射強度の例を示す図。
【図12】各ラインの反射強度の積の例を示す図。
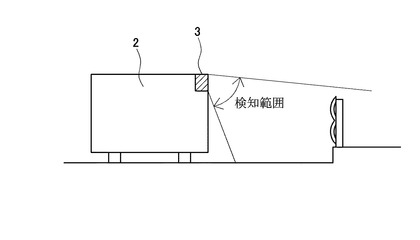
【図13】車両側方の検知の例を示す図。
【発明を実施するための形態】
【0037】
以下、本発明の実施形態を図面を参照しつつ説明する。まず図1は、本発明を実施した場合の平面図である。そして図2は、本発明に係る検知システム1の装置構成図である。
【0038】
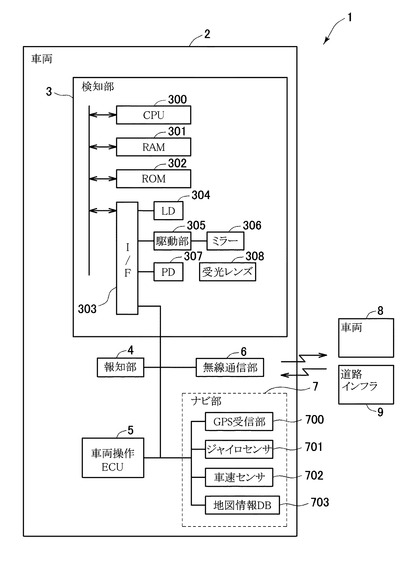
図1に示されているとおり、本実施例では、運転中の車両2の側方にレーザ光(電磁波)を照射し、その反射波によって車線の区画線の位置を検出する。図2に示されているとおり、本発明の検知システム1は、車両2に装備された検知部3、報知部4、車両操作ECU5、無線通信部6、ナビゲーション部7(ナビ部)を備える。なお報知部4、車両操作ECU5、無線通信部6、ナビ部7は、全てを装備しなくともよく、必要なもののみ装備すればよい。それに関する詳細は後述する。また本発明は他の車両8、あるいは道路インフラ9を利用する場合がある。それに関する詳細も後述する。なお本実施例で用いるレーザ光は例えば波長900nmのレーザとすればよいが、本発明はこれに限定されず、区画線の検知に適した他の波長のレーザ光(電磁波)であってもよい。
【0039】
検知部3は、CPU300、RAM301、ROM302、及びインターフェース部303(I/F)を介して、レーザダイオード304(LD)、駆動部305、ミラー306、フォトダイオード307(PD)、受光レンズ308を備える。
【0040】
CPU300では後述する演算など各種情報処理を実行する。RAM301はCPU300の作業領域として用いられる一時記憶部である。ROM302は、本発明で必要となる各種プログラムなどを記憶する不揮発性記憶部である。インターフェース部303(I/F)は各部との接続のために用いる。
【0041】
レーザダイオード304(LD)は電力が供給されて所定波長のレーザ光を出力する。ミラー306は複数のミラー面を備えて、駆動部305により駆動されて回動しつつLD304が発光したレーザ光を反射することによって、レーザ光による複数の走査線を形成する。LD304から出力されて路面で反射した反射レーザ光は、受光レンズ308で集光されて、フォトダイオード307(PD)で受光される。PD307からの出力により路面の反射強度が計測できるとする。
【0042】
以上の構成を、図1のようにレーザ光の走査線が車両側方の路面に照射されるように配置すればよい。したがって、例えば検知部3を筐体内に収容して、その筐体を車両2の側面に配置して、LD304及びミラー306で形成された走査線が、車両横向き(車幅方向)、斜め下方向に向けて照射されるように配置すればよい。
【0043】
PD307、受光レンズ308も、そのように照射されて路面で反射したレーザ光を集光、受光することができる向きに配置すればよい。なお図1の例では走査線を3本としているがそれは例示に過ぎず、本発明は任意の本数の走査線に対応できる。なお以下の実施例の一部において、LD304、PD307などを車両側方のみでなく車両前方にもレーザ光を照射するように装備する場合がある。その詳細は後述する。
【0044】
報知部4は、車室内に配置された表示部、あるいは音声(音響)出力部、あるいはその両方を備えて、後述するように検知部3により車両2が車線の区画線に近づきすぎているような場合に、車両2の運転者(あるいは乗員)に、その旨を報知する。表示部の場合は、区画線に近づきすぎている内容の文字表示やアイコンの表示を実行する。音声(音響)出力部の場合、区画線に近づきすぎている内容の音声出力やブザーやサイレンなどの音響出力を実行する。これら表示と音声(音響)出力を同時に実行してもよい。
【0045】
車両操作ECU5は、車両2が自動運転車両の場合に装備されて、車速やステアリングを自動で調節して自動運転を実行するECUである。車両操作ECU5は自動運転の場合にのみ装備し、報知部4は運転者がいる場合にのみ装備すればよい。無線通信部6は、他の車両8との間の車車間通信、あるいは道路インフラ9との路車間通信のための機能を備える。
【0046】
ナビ部7は、GPS受信部700、ジャイロセンサ701、車速センサ702、地図情報データベース703(DB)を備える。
【0047】
GPS受信部700は、GPS(Global Positioning System)衛星からのGPS信号を受信する。ジャイロセンサ701は、車両のヨー方向の角速度を検出する機能を有するセンサである。ジャイロセンサ701が検出した角速度を積分することにより車両の方向変化が算出される。
【0048】
車速センサ702は、車両の速度を検出するセンサである。車速センサ702は、例えばロータリーエンコーダ等の周知の構成によって、車輪の所定回転角度ごとにパルス信号を発生させ、それを基にして車両の速度を算出する。そして例えばCPU300において車速センサ702で得た車速を積算して車両の走行距離を算出することができるとする。
【0049】
DB703は、通常のカーナビゲーションで利用される地図情報に道路の舗装部分、あるいは舗装部分以外、例えば道路の継目の位置情報を付加したデータベースとすればよい。
【0050】
ナビ部7では、GPS受信部700、ジャイロセンサ701、車速センサ702、DB703を用いて、以下のとおりナビゲーション(ナビ)に関する処理を実行する。
【0051】
ナビにおける位置算出方法は、主にGPS航法、自律航法、マップマッチング法からなる。このうちGPS航法は、GPS受信部700によってGPS衛星からのGPS信号を受信することによって、地球上での車両の位置(緯度、経度)を算出するものである。
【0052】
自律航法では、上記構成の場合、ジャイロセンサ701等によって車両の方向を求め、車速センサ702で検出した車速を積分して走行距離を求めることによって車両の位置を算出する。本発明ではジャイロセンサ701によって計測された角速度を補正した後にこれを用いて車両方向を算出すればよい。例えばCPU300では、上記GPS航法と自律航法とを組み合わせたハイブリッド航法によって車両位置を算出する。
【0053】
ハイブリッド航法では例えば、最初の位置決定を含めた、時々の数値補正のときにGPS航法を用い、それ以外のときは自律航法によって車両の進行方向及び走行距離を時々刻々算出し、それを積算していくことにより、逐次車両位置を算出していく。ハイブリッド航法を使用することによって、GPS航法ではトンネル内や建築物の陰でGPS衛星からの電波が受信しにくい状況では車両位置の算出が困難である問題点と、自律航法では走行距離を積算していくうちに誤差が累積していき車両位置の精度が低減する問題点とを互いに補うことができるので、高精度に車両位置が算出できる。
【0054】
そして、ハイブリッド航法によって得られた車両位置をマップマッチング法によって修正すればよい。マップマッチング法では、ハイブリッド航法によって得られた車両位置がDB703が有する地図と照らし合わせて不適切な位置であるとみなされた場合には、DB703が有する地図に整合させて、より適切な車両位置に修正する。なお上記においてナビ部7の情報処理は、ナビ部7自体がCPUを備えて実行してもよい。
【0055】
以上の構成のもとで検知システム1は、車両2の側方に位置する道路上の区画線をリアルタイムで検知して、車線のなかにおける車両2の現在位置を算出する。その際に道路の舗装部分であるか否かで検知方法を変更する。その処理手順は図3に示されている。図3(及び後述の図4から図10)のフローチャートはプログラム化して予め例えばROM302に記憶しておき、CPU300が自動的にそれを呼び出して実行するとすればよい。なお本実施例で道路上の区画線(道路区画線、車線区画線)とは、道路と道路以外を区画する区画線でもよく、複数車線間を区画する区画線でもよい。また区画線の色彩は白(白線)でも、橙色(橙線)でもよい。以下の説明では、白線の場合を説明し、さらに舗装部分であるか否かの例として継目であるか否かの場合を説明する。
【0056】
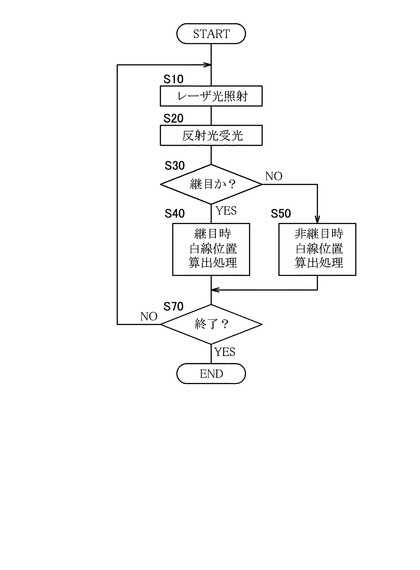
図3の処理では、車両2から見たときの側方両側の白線位置を繰り返し検知する。基本的な流れは、S10からS50の処理によって今回(現在)の白線位置を算出する。その際、現在継目を通過中であるか否かを判定して(S30)、継目であるか否かで、異なる方法で白線位置を検知する(S40、S50)。
【0057】
具体的な処理手順は以下のとおりである。まず手順S10でLD304からレーザ光を照射する。具体的には、LD304からレーザをミラー306に向けて発光し、ミラー306が回動しながらミラー面でレーザを反射して、その反射光が車両側方下方の路面へと照射される。LD304からはパルス状のレーザ光が発光されるとすればよい。
【0058】
ミラー306のミラー面は、ミラー306の回動軸と平行あるいは斜め方向に複数形成されており、各ミラー面の回動軸からの傾斜角度は異なるとする。これにより、各ミラー面からの反射光が1本の走査線に形成される。そして各ミラー面の傾斜角度が異なることにより、異なった2つのミラー面により反射されたレーザ光は、2本の異なる(平行な)走査線となる。
【0059】
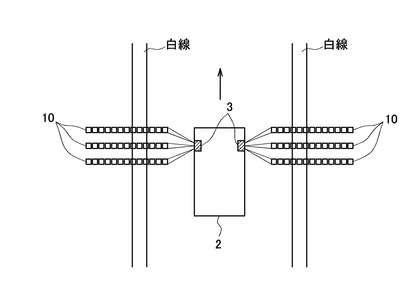
ミラー306が1周することにより1組の平行な走査線が形成される。こうして図1に示されているように、車幅方向(図1においては横方向)に形成された複数の走査線10が、車両進行方向(図1においては縦方向)に平行に並ぶかたちで形成される。
【0060】
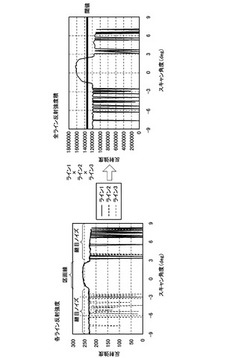
次にS20で反射光を受光する。上述のとおり路面からの反射波を受光したPD307の出力からは、路面の反射強度が取得できるとする。その例が図11に示されている。同図のプロットの例では、各ライン(走査線)の受光波における反射強度とスキャン角度との関係が示されている。図11(a)、(b)に示されているように、レーザ光を照射した(反射光が反射した)路面が継目でない場合(a)は、白線部分とそれ以外とで反射強度の差が大きいが、継目(b)においては、白線以外の領域における(ノイズによる)反射強度が相対的に大きく、白線部分との間で差が小さい。
【0061】
次にS30で車両2が現在継目上を走行中である(現在の反射光が反射した路面が継目である)か否かが判定される。その判定処理の具体例は図4から図7に示されている。その詳細は後述する。車両2が現在継目上を走行中である場合(S30:YES)はS40に進み、継目上を走行中でない場合(S30:NO)はS50に進む。
【0062】
S40では継目時における白線位置算出処理を実行する。その例は図8と図9とに示されている。その詳細は後述する。S50では非継目時における白線位置算出処理を実行する。その例は図10に示されている。その詳細は後述する。
【0063】
CPU300はS70で図3の処理を終了するか否かを判断する。例えばイグニションオフなどがあった場合、図3の処理を終了する(S70:YES)。この処理を終了しない場合(S70:NO)はS10に戻って上記手順を繰り返す。以上が図3の処理手順である。
【0064】
次に図4から図7を説明する。上述のとおり図4から図7には継目判定処理の4つの例が示されている。まず図4に示された継目判定処理の第1の例を説明する。
【0065】
図4の処理手順ではまずS100で、図11に示されたようなプロットのなかで反射強度の数値が閾値以上となったパルス光(スキャン角度)の数(あるいは区間)を算出する。閾値は予め適切に定めておいてROM302などに記憶しておけばよい。
【0066】
次にS110以降で、反射強度の波形が所定のパターンであれば継目を走行中であると判定する。ここで所定のパターンとは、図4の例では、反射強度の波形全体において上記閾値以上の区間が所定の比率より大きいことであるとする。したがってまずS110で、S100で求めた区間の全区間に対する比率を算出する。
【0067】
次にS120で、S110で求めた比率が所定値よりも大きいか否かを判定する。所定値は例えば30%、40%などと定めておけばよい。所定値よりも大きい場合(S120:YES)はS130に進み、所定値以下の場合(S120:NO)はS140に進む。
【0068】
S130に進んだ場合は反射強度が閾値以上の区間の全区間に対する比率が大きい場合である。これは図11(b)に示したように、継目通過中で白線以外の部分におけるノイズの反射強度が白線部の反射強度に近いほど大きい場合であるとみなせる。したがってS130では現在継目を通過中であると判定する。
【0069】
一方S140に進んだ場合は反射強度が閾値以上の区間の全区間に対する比率が小さい場合である。これは図11(a)に示したように、継目通過中でなく白線以外の部分におけるノイズ(の反射強度)が白線部と比較してかなり小さい場合であるとみなせる。したがってS140では現在継目を通過中ではないと判定する。以上が図4の処理である。
【0070】
次に図5に示された継目判定処理の第2の例を説明する。図5の例においては、上記でも触れたとおり、車両側方へ向けてレーザ光を照射するだけでなく、車両前方に向けてもレーザ光を照射する。
【0071】
この目的のためにLD304、駆動部305、ミラー306、PD307、受光レンズ308を、車両前面にも装備する。レーザ光の照射及び受光の仕組みは上記と同様とすればよい。そしてその配置位置は、車両前面に、例えば1組、あるいは車両前面左右に2組装備すればよい。
【0072】
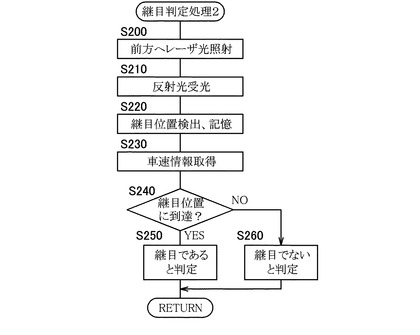
図5の処理ではまず手順S200で上記のとおり車両前面に装備されたLD304から前方にレーザ光を照射する。そしてS210でそれが路面で反射した反射光を受光する。
【0073】
次にS220で、S210で受光した反射光から継目位置を検出し記憶する。ここでは、例えばパターンマッチングの手法により検出すればよい。すなわち具体的には、受光した反射光による画像において、エッジ抽出を実行し、その結果得られた画像と、予め記憶しておいた路面上の白線の画像パターンとのマッチングを実行する。
【0074】
このマッチング処理により白線を認識し、さらにその白線画像が途切れている部分が所定値よりも大きい場合に、それが道路の継目であると認識する。そして継目の車両2から見た相対的位置を、画像内での位置から推定する。例えば以上の手法により継目位置が検出できる。この継目位置情報はRAM301などに記憶しておけばよい。
【0075】
次にS230で車速情報を取得する。これは車速計の数値を車内通信により取得すればよい。次にS240で、S230で取得した車速から走行距離を算出して、その情報から、S210で検知した継目位置に現在到達したか否かを判定する。
【0076】
継目位置に到達したと判定された場合(S240:YES)はS250に進み、到達していないと判定された場合(S240:NO)はS260に進む。S250では現在継目を通過中であると判定し、S260では現在継目を通過中でないと判定する。以上が図5の処理である。
【0077】
次に図6に示された継目判定処理の第3の例を説明する。この例においてはナビ部7を用いて継目判定を実行する。
【0078】
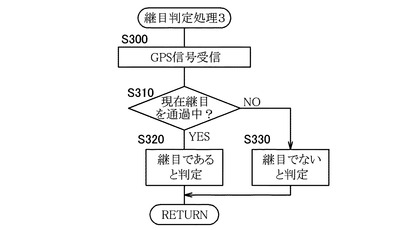
図6の処理では手順S300でGPS信号を受信する。これは上述のとおりGPS受信部700により受信すればよい。それにより上述のナビの各種手法を用いて車両2の位置を算出する。そしてS310で、その車両位置とDB703に記憶された継目の位置情報とから、現在車両が継目を通過中であるか否かを判定する。
【0079】
車両2が現在継目を通過中であると判定された場合(S310:YES)はS320に進み、継目を通過中でないと判定された場合(S310:NO)はS330に進む。S320では現在継目を通過中であると判定し、S330では現在継目を通過中でないと判定する。以上が図6の処理である。
【0080】
なお図1において、ナビ部7は、図6の処理のためだけの専用装置としてもよく、いわゆるカーナビゲーション装置(カーナビ装置)を兼用するとしてもよい。カーナビ装置を兼用する際には、カーナビ装置における通常の地図情報データベースに継目位置情報を付加したデータベースをDB703とすればよい。
【0081】
次に図7に示された継目判定処理の第4の例を説明する。この例では車車間通信あるいは路車間通信を用いて継目判定を実行する。
【0082】
車車間通信の場合、図7の処理ではまず手順S400で、無線通信部6を用いて前方の車両8から継目位置の情報を取得し、記憶する。前方の車両8では、例えば本実施例(図4から図6)で示された何らかの方法で継目位置を検出しているとする。自車両では、前方の車両8から取得した継目位置を例えばRAM301に記憶しておく。
【0083】
S400では路車間通信により道路インフラストラクチュア9(道路インフラ)から継目位置情報を取得するとしてもよい。道路インフラ9としては、例えば路側機として設置された専用狭域無線通信(DSRC:Dedicated Short−Range Communications)によるDSRCビーコン(DSRC路上機)や、近赤外線通信による光ビーコン等とすればよい。
【0084】
次にS410で車速情報を取得する。これは車速計の数値を車内通信で取得すればよい。次にS420で、S410で取得した車速から走行距離を算出して、その情報から、S400で取得した継目位置に現在到達したか否かを判定する。
【0085】
車両2が継目位置に到達したと判定された場合(S420:YES)はS430に進み、到達していないと判定された場合(S420:NO)はS440に進む。S430では現在継目を通過中であると判定し、S440では現在継目を通過中でないと判定する。以上が図7の処理である。
【0086】
なお図7の説明における前方車両とは、例えば隊列(縦列)を組んだ車両における先頭車両としてもよい。さらに隊列を組んだ車両は自動走行車両の列としてもよい。
【0087】
次に図8と図9とを説明する。上述のとおり図8と図9には継目時白線位置算出処理の2つの例が示されている。まず図8に示された継目時白線位置算出処理の第1の例を説明する。
【0088】
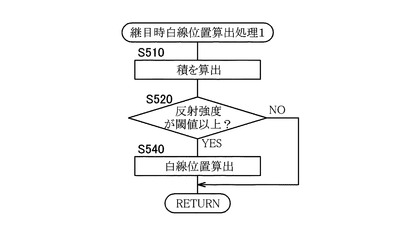
図8の処理ではまず手順S510で、予測範囲内の各走査線の反射光の反射強度の積を算出する。正確には、反射光の全走査線における、車幅方向の同一位置の反射強度の数値の積を求める。その例が図12に示されている。車幅方向の同一位置とは、例えば図12では同じスキャン角度のことを指す。
【0089】
上述のとおり、継目においては白線(区画線)部分の反射強度とそれ以外の領域の反射強度との差が小さい。しかし図12に示されているように、(図12の例では3ラインの)積を算出することによって、白線部分とそれ以外の領域との反射強度の差が拡大(強調)される。したがって閾値(図12参照)を適切に設定して、それ以上とそれ未満とで分けることにより、以下で示すとおり白線部分のみが検知できる。なおS510では各走査線の反射強度の和を算出してもよい。和によっても白線部分とそれ以外の領域との反射強度の差が拡大(強調)される。
【0090】
次にS520で、反射強度が閾値以上の部分があるかを判定する。閾値以上の部分がある場合(S520:YES)はS540に進み、閾値以上の部分がない場合(S520:NO)は、白線検知不能(エラー)として、図8の処理を終了する。
【0091】
S540に進んだ場合は、反射強度が閾値以上の範囲があり、それが通常の白線幅に相当するので、実際に白線位置を算出する。具体的には、例えば閾値以上の領域の左右両端を白線の両端と認識すればよい。そして、白線の左右両端の中央を白線の中心位置(あるいは単に白線位置)として算出すればよい。
【0092】
次に図9に示された継目時白線位置算出処理の第2の例を説明する。この例では、継目通過時には車両側方の構造物を検知して白線位置を算出する。
【0093】
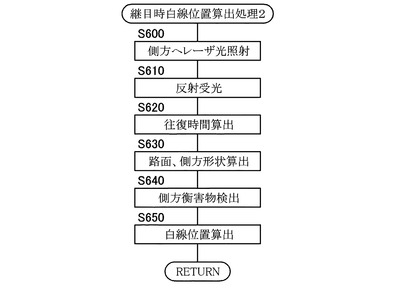
図9の処理ではまず手順S600で、車両側方へレーザ光を照射する。このレーザ光照射は、S10におけるレーザ光照射の照射範囲を車両側方にまで拡大することにより実行できる。その例が図13に示されている。次にS610で、そのレーザ光が、車両側方の路面、及び車両側方の構造物に反射した反射波を受光する。
【0094】
次にS620で、レーザ光の往復時間を算出する。すなわちレーザ光がLD304で照射されてから、路面及び車両側方で反射した反射波をPD307が受光するまでの時間を計測する。この目的のためにCPU300が時間測定機能を有するとすればよい。
【0095】
次にS630で、路面、及び車両側方の(表面)形状を算出する。具体的には、レーザ光の照射方向(スキャン角度)ごとに、その方向におけるレーザ光の往復時間から算出された構造物(レーザ光が反射した対象物)までの距離をプロットすればよい。当然構造物までの距離は、S620で計測した往復時間に電磁波の速度(光速度)を乗算することにより算出する。
【0096】
次にS640で側方の構造物を検出する。つまりS630で算出した形状から、車両2の側方にある構造物を認識する。ここで構造物とは道路に固定されて、且つ区画線(白線)と平行に設置された構造物(道路構造物、路上構造物)とすればよい。その例としてはガードレールや道路の側壁とすればよい。これらの構造物の認識のために、予めガードレールや側壁の、車両側から見たときの表面形状のモデルを記憶しておき、これらのモデル形状と計測した形状とのパターンマッチングを実行する。
【0097】
そしてS650で白線位置を算出する。具体的には、S640で算出したガードレールや側壁の位置を基準にして、白線位置を推定する。この目的のために、予めガードレールや側壁と白線(道路区画線)との間の平均的な位置関係を例えばROM302に記憶しておけばよい。
【0098】
上述のとおりS600におけるレーザ光照射は、S10での照射の照射範囲の拡大としてもよい。この場合S600のレーザ光照射は白線検知のためのLDなどを兼用する。またこの場合、同じ反射光から反射強度と往復時間の2つの数値を取得することとなる。あるいはS10のためのLD304のほかに、S600のためのLD304を別個に装備してもよい。
【0099】
次に図10を説明する。上述のとおり図10には非継目時白線位置算出処理の例が示されている。
【0100】
図10の処理ではまず手順S710で、反射強度が閾値以上の部分があるかを判定する。閾値以上の部分がある場合(S710:YES)はS730に進み、閾値以上の部分がない場合(S710:NO)は、白線検知不能(エラー)として、図10の処理を終了する。
【0101】
S730に進んだ場合は、反射強度が閾値以上の範囲があり、それが通常の白線幅に相当する場合である。したがって各ラインごとに、白線位置を算出する。上述のとおり、継目通過中でない場合には、白線(区画線)部分の反射強度とそれ以外の領域の反射強度との差が大きいので、精度よく白線位置が算出できる。具体的には、例えば閾値以上の領域の左右両端を白線の両端と認識すればよい。そして、白線の左右両端の中央を白線の中心位置(あるいは単に白線位置)として算出すればよい。
【0102】
そしてS740で全ラインにおける白線位置の平均を算出する。この平均値を白線位置とすればよい。非継目走行時にはノイズの影響が小さいので、図10の手順で精度よく白線位置が検知できる。
【0103】
本実施例では、図3から図10の処理により白線位置、あるいはさらに車両位置が検出されたことを受けて、例えば以下の各処理を実行すればよい。
【0104】
まず報知部4で報知処理を実行する。具体的には、車両2の運転者に対して車両2が車線の端に寄りすぎていることを報知(警告)する。これは車両2と白線との間隔が所定値よりも近くなりすぎた場合にのみ実行すればよい。
【0105】
また車両2で自動運転が実行されている場合には、車両操作ECU5による自動運転で、図3から図10の処理で取得した白線位置、車両位置の情報を利用するとすればよい。例えば、車両2の横方向の位置が車線中央となるようにステアリングを自動制御する。これは走行の安全性を向上させる。
【0106】
あるいは、車両2の横方向の位置が先行車両と同じ位置となるように、ステアリングを自動制御する。この制御を実行した場合、先行車両の存在で空気抵抗を低減できるので、燃費向上のために有効である。この目的のために先行車両の位置情報を、先行する別の車両8から無線通信部6を通じて車車間通信で取得すればよい。
【0107】
上記実施例では白線検知の場合を説明したが、上述のとおり本発明はこれに限定されず、道路の区画線一般の検知に用いることができる。また上記では道路の継目か否かを判定したが、これに限定せず、舗装部分すなわち平坦なアスファルト舗装か否かを判定するように変更することができる。
【符号の説明】
【0108】
1 検知システム
2 車両
3 検知部
304 レーザダイオード(LD)
306 ミラー
307 フォトダイオード(PD)
【技術分野】
【0001】
本発明は、検知装置に関する。
【背景技術】
【0002】
従来から、車両の周囲の情報を検知することにより、自車の置かれている状況を推定し、運転の安全性の向上や自動運転技術の開発に繋げるための提案がなされている。例えば、下記特許文献1では、車両前方に検知波を照射し、その反射波によって領域毎に構造物までの距離データを取得して、その距離に応じて警報を発するシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−157697号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
安全性の向上や自動運転のためには、自車の置かれている状況として、現在、車線の中のどの位置を走行しているか、という情報も重要な情報である。その際には、車両の周囲の情報として、道路の区画線の位置を検知することが目的となる。しかしながら、特許文献1の技術では、車両前方やや下向きに検知波を照射するので、前方車両などが検知波を遮り、区画線の検知が適切に実行できない場合がある。特に車間距離が短い場合には影響が大きい。さらに、車両から距離の離れた位置での区画線を検知するため、現在の車線内の車両位置を正確に検知することが困難である。
【0005】
したがって区画線の検知を適切に且つ正確に実行するためには、自車の前方でなく、側方に検知波を照射して区画線を検知することが適切と考えられる。しかしながら、前方に検知波を照射する場合には、自車の走行する車線の情報を事前に取得及び蓄積することができるため、ノイズや区画線以外からの不要な反射波が存在したとしても、蓄積した多くの情報を活用することにより、区画線のみを検知できる可能性がある。それに対し、車両側方の区画線を検知する場合には、情報の蓄積がない状態で即時に区画線を検知しなければならない。
【0006】
道路(特に高速道路、高架道路)の継目(継ぎ目)部分では、区画線以外の領域が道路アスファルトと異なる材質である、凹凸がある、等の要因により、区画線以外からも不要な反射波が検知され、区画線を検知しにくい。このような状況にも即時対応し、ロバストな区画線位置の検知ができる必要がある。
【0007】
そこで本発明が解決しようとする課題は、上記問題点に鑑み、車両側方の道路の区画線を、道路の継目等を通過した場合においても検知可能な、ロバスト性に優れた検知装置を提供することにある。
【課題を解決するための手段及び発明の効果】
【0008】
上記課題を達成するために、本発明に係る検知装置は、車両に備えられて、車両の側方の路面へ向けて複数の走査線からなる電磁波を照射する発光部と、その発光部から照射された電磁波が路面で反射して形成された反射波を受光する受光部と、その受光部が受光した反射波が反射した路面が舗装部分であるか否かを判定する判定手段と、その判定手段が舗装部分だと判定した場合と舗装部分でないと判定した場合とで異なった方法を用いて、前記受光部が受光した反射波から路面上の区画線を検知する検知部と、を備えたことを特徴とする。ここで舗装部分とは、平坦なアスファルト舗装を指す。
【0009】
これにより本発明に係る検知装置では、車幅方向に電磁波を照射して反射波により道路上の区画線(道路区画線、車線区画線)を検知するので、前方の他の車両などが構造物とならずに区画線検知が行える。さらに、現在走査中の路面が舗装部分であるか否かを判定して、舗装部分である場合と舗装部分でない場合とで異なった方法で区画線を検知するので、道路の舗装部分であるか否かに対応してロバストな区画線検知が実行できる。
【0010】
また前記判定手段は、道路の継目を前記舗装部分でないと判定するとしてもよい。
【0011】
これにより現在走査中の路面が継目であるか否かを判定して、継目である場合と継目でない場合とで異なった方法で区画線を検知する。したがって、道路の継目部分では、区画線以外の領域が道路アスファルトでない等、区画線検知が困難な面があるが、この困難を克服してロバストな区画線検知が実行でき、継目でない部分においても、精度のよい区画線検知が実行できる。
【0012】
また前記検知部は、前記判定手段が舗装部分でないと判定した場合に、前記受光部が受光した反射波の各走査線における車幅方向の同一位置における反射強度の積又は和を算出して、その算出結果が所定の閾値よりも大きい領域を路面上の区画線として検知する第1の検知手段を備えたとしてもよい。
【0013】
これにより道路の舗装部分でない箇所における区画線を検知するために、各走査線の反射強度の積又は和を算出して、算出結果が閾値を超えた領域を区画線として検知するので、継目において区画線部分とそれ以外とで反射強度の差が小さい傾向があっても、積又は和を算出することにより区画線部分とそれ以外とでの反射強度の差が拡大して安定した区画線が検知できる。
【0014】
また前記検知部は、前記判定手段が舗装部分であると判定した場合に、前記受光部が受光した反射波の各走査線における反射強度が所定の閾値よりも大きい領域を前記区画線として検知し、検知した前記区画線の位置の平均を算出するとしてもよい。
【0015】
これにより舗装部分でない場合には、各走査線で反射強度が閾値より大きい部分の平均により区画線位置を算出するので、舗装部分か否かで区画線検知方法を変更して、舗装部分である場合にも高精度に区画線を検知できる。
【0016】
また前記車両から側方へ電磁波を照射して、道路に固定され且つ区画線と平行に設置された構造物である道路構造物を検知する構造物検知部を備え、前記検知部は、前記判定手段が舗装部分でないと判定した場合に、前記構造物検知部が検知した道路構造物の位置と、路面上の区画線との位置関係から、路面上の区画線の位置を検知する第2の検知手段を備えたとしてもよい。
【0017】
これにより道路の舗装部分でない箇所における区画線を検知するために、車両側方の道路に固定され且つ区画線と平行に設置された構造物を検知して、その構造物の位置と路面上の区画線の位置関係とから区画線の位置を検知するので、舗装部分でない箇所では検知波を照射して区画線を検知することを行わずに、より検知しやすい道路側方の構造物の位置を利用して区画線位置を検知する。したがって舗装部分でない箇所を走行中にもロバストに区画線検知が実行できる。
【0018】
また前記構造物検知部は、前記発光部及び受光部と兼用であるとしてもよい。
【0019】
これにより、構造物検知部を発光部及び受光部と兼用とするので、簡素な構造により、道路構造物を利用したロバストな区画線検知が実行できる。
【0020】
また前記判定手段は、反射波の反射強度に対して閾値を設けて、前記受光部が受光した反射波において反射強度が前記閾値を超える区間の総計が所定値よりも大きい場合に舗装部分でないと判定する第1の判定手段を備えたとしてもよい。
【0021】
これにより反射波における反射強度の波形において閾値を超える区間の総計が所定値よりも大きい場合に舗装部分でないと判定するので、例えば継目など舗装部分でない領域においては区画線領域以外でも反射強度が相対的に高い領域が多いことを判定条件に含めることができて、高精度に舗装部分であるか否かを判定できる。
【0022】
また前記判定手段は、車両前方に電磁波を照射する副発光部と、前記副発光部が照射した電磁波が路面で反射して形成された反射波を受光する副受光部と、前記副受光部が受光した反射波を用いて、前記反射波が反射した路面が舗装部分であるか否かを判定する第2の判定手段を備えたとしてもよい。
【0023】
これにより車両前方に電磁波を照射してその反射波から舗装部分であるか否かを判定するので、車両前方に電磁波を照射して舗装部分か否かを判定し、車両側方に電磁波を照射して舗装部分か否かに応じて方法を替えて区画線を検知する。したがって、車両前方と側方への電磁波の照射を有効に使い分けて高精度でロバストな区画線検知が行える。
【0024】
またGPS衛星からのGPS信号を受信するGPS受信部と、路面における舗装部分以外の位置情報を記憶した記憶部と、を備え、前記判定手段は、前記GPS受信部が受信したGPS信号から車両の現在位置を算出し、その現在位置と前記記憶部が記憶する舗装部分以外の位置情報とを参照して、車両の現在位置が舗装部分であるか否かを判定する第3の判定手段を備えたとしてもよい。
【0025】
これによりGPSによる車両位置と、舗装部分の位置情報とから、舗装部分を走行中か否かを判定するので、例えば既存のカーナビシステムを効果的に兼用して、舗装部分であるか否かを判定することが可能となる。
【0026】
また車両とその外部の通信対象との間で無線通信を行う無線通信部と、前記車両の車速を取得する取得手段と、を備え、前記判定手段は、前記無線通信部が前記通信対象から無線通信で取得した舗装部分の位置情報と、前記取得手段が取得した前記車両の車速の情報とから、前記車両の現在位置が舗装部分であるか否かを判定する第4の判定手段を備えたとしてもよい。
【0027】
これにより車両とその外部の通信対象との間の無線通信により舗装部分の位置情報を取得し、それと車両の車速の情報を組み合わせて車両が舗装部分を走行中か否かを判定するので、車両の外部との間の無線通信を利用して舗装部分を走行中か否かを精度よく判定できる。
【0028】
また前記通信対象には前記車両とは異なる車両が含まれるとしてもよい。
【0029】
これにより、自車両とは異なる車両との間の車車間通信を利用することにより、自車両が舗装部分を走行中か否かを精度よく判定できる。
【0030】
また前記通信対象には道路インフラストラクチュアが含まれるとしてもよい。
【0031】
これにより、車両と道路インフラストラクチュアとの間の路車間通信を利用することにより、車両が舗装部分を走行中か否かを精度よく判定できる。
【0032】
また前記道路構造物には道路のガードレールが含まれるとしてもよい。
【0033】
これにより車両側方のガードレールを検知して、その位置情報と路面上の区画線との位置関係から区画線位置を検知するので、舗装部分以外を走行中にも、ガードレールの位置情報からロバストに区画線検知が実行できる。
【0034】
また前記道路構造物には道路の側壁が含まれるとしてもよい。
【0035】
これにより車両側方の側壁を検知して、その位置情報と路面上の区画線との位置関係から区画線位置を検知するので、舗装部分以外を走行中にも、道路の側壁の位置情報からロバストに区画線検知が実行できる。
【図面の簡単な説明】
【0036】
【図1】本発明の検知システムの実施例における平面図。
【図2】検知システムの装置構成を示す図。
【図3】検知処理を示すフローチャート。
【図4】継目判定処理の第1の例を示すフローチャート。
【図5】継目判定処理の第2の例を示すフローチャート。
【図6】継目判定処理の第3の例を示すフローチャート。
【図7】継目判定処理の第4の例を示すフローチャート。
【図8】継目時白線位置算出処理の第1の例を示すフローチャート。
【図9】継目時白線位置算出処理の第2の例を示すフローチャート。
【図10】非継目時白線位置算出処理の例を示すフローチャート。
【図11】反射強度の例を示す図。
【図12】各ラインの反射強度の積の例を示す図。
【図13】車両側方の検知の例を示す図。
【発明を実施するための形態】
【0037】
以下、本発明の実施形態を図面を参照しつつ説明する。まず図1は、本発明を実施した場合の平面図である。そして図2は、本発明に係る検知システム1の装置構成図である。
【0038】
図1に示されているとおり、本実施例では、運転中の車両2の側方にレーザ光(電磁波)を照射し、その反射波によって車線の区画線の位置を検出する。図2に示されているとおり、本発明の検知システム1は、車両2に装備された検知部3、報知部4、車両操作ECU5、無線通信部6、ナビゲーション部7(ナビ部)を備える。なお報知部4、車両操作ECU5、無線通信部6、ナビ部7は、全てを装備しなくともよく、必要なもののみ装備すればよい。それに関する詳細は後述する。また本発明は他の車両8、あるいは道路インフラ9を利用する場合がある。それに関する詳細も後述する。なお本実施例で用いるレーザ光は例えば波長900nmのレーザとすればよいが、本発明はこれに限定されず、区画線の検知に適した他の波長のレーザ光(電磁波)であってもよい。
【0039】
検知部3は、CPU300、RAM301、ROM302、及びインターフェース部303(I/F)を介して、レーザダイオード304(LD)、駆動部305、ミラー306、フォトダイオード307(PD)、受光レンズ308を備える。
【0040】
CPU300では後述する演算など各種情報処理を実行する。RAM301はCPU300の作業領域として用いられる一時記憶部である。ROM302は、本発明で必要となる各種プログラムなどを記憶する不揮発性記憶部である。インターフェース部303(I/F)は各部との接続のために用いる。
【0041】
レーザダイオード304(LD)は電力が供給されて所定波長のレーザ光を出力する。ミラー306は複数のミラー面を備えて、駆動部305により駆動されて回動しつつLD304が発光したレーザ光を反射することによって、レーザ光による複数の走査線を形成する。LD304から出力されて路面で反射した反射レーザ光は、受光レンズ308で集光されて、フォトダイオード307(PD)で受光される。PD307からの出力により路面の反射強度が計測できるとする。
【0042】
以上の構成を、図1のようにレーザ光の走査線が車両側方の路面に照射されるように配置すればよい。したがって、例えば検知部3を筐体内に収容して、その筐体を車両2の側面に配置して、LD304及びミラー306で形成された走査線が、車両横向き(車幅方向)、斜め下方向に向けて照射されるように配置すればよい。
【0043】
PD307、受光レンズ308も、そのように照射されて路面で反射したレーザ光を集光、受光することができる向きに配置すればよい。なお図1の例では走査線を3本としているがそれは例示に過ぎず、本発明は任意の本数の走査線に対応できる。なお以下の実施例の一部において、LD304、PD307などを車両側方のみでなく車両前方にもレーザ光を照射するように装備する場合がある。その詳細は後述する。
【0044】
報知部4は、車室内に配置された表示部、あるいは音声(音響)出力部、あるいはその両方を備えて、後述するように検知部3により車両2が車線の区画線に近づきすぎているような場合に、車両2の運転者(あるいは乗員)に、その旨を報知する。表示部の場合は、区画線に近づきすぎている内容の文字表示やアイコンの表示を実行する。音声(音響)出力部の場合、区画線に近づきすぎている内容の音声出力やブザーやサイレンなどの音響出力を実行する。これら表示と音声(音響)出力を同時に実行してもよい。
【0045】
車両操作ECU5は、車両2が自動運転車両の場合に装備されて、車速やステアリングを自動で調節して自動運転を実行するECUである。車両操作ECU5は自動運転の場合にのみ装備し、報知部4は運転者がいる場合にのみ装備すればよい。無線通信部6は、他の車両8との間の車車間通信、あるいは道路インフラ9との路車間通信のための機能を備える。
【0046】
ナビ部7は、GPS受信部700、ジャイロセンサ701、車速センサ702、地図情報データベース703(DB)を備える。
【0047】
GPS受信部700は、GPS(Global Positioning System)衛星からのGPS信号を受信する。ジャイロセンサ701は、車両のヨー方向の角速度を検出する機能を有するセンサである。ジャイロセンサ701が検出した角速度を積分することにより車両の方向変化が算出される。
【0048】
車速センサ702は、車両の速度を検出するセンサである。車速センサ702は、例えばロータリーエンコーダ等の周知の構成によって、車輪の所定回転角度ごとにパルス信号を発生させ、それを基にして車両の速度を算出する。そして例えばCPU300において車速センサ702で得た車速を積算して車両の走行距離を算出することができるとする。
【0049】
DB703は、通常のカーナビゲーションで利用される地図情報に道路の舗装部分、あるいは舗装部分以外、例えば道路の継目の位置情報を付加したデータベースとすればよい。
【0050】
ナビ部7では、GPS受信部700、ジャイロセンサ701、車速センサ702、DB703を用いて、以下のとおりナビゲーション(ナビ)に関する処理を実行する。
【0051】
ナビにおける位置算出方法は、主にGPS航法、自律航法、マップマッチング法からなる。このうちGPS航法は、GPS受信部700によってGPS衛星からのGPS信号を受信することによって、地球上での車両の位置(緯度、経度)を算出するものである。
【0052】
自律航法では、上記構成の場合、ジャイロセンサ701等によって車両の方向を求め、車速センサ702で検出した車速を積分して走行距離を求めることによって車両の位置を算出する。本発明ではジャイロセンサ701によって計測された角速度を補正した後にこれを用いて車両方向を算出すればよい。例えばCPU300では、上記GPS航法と自律航法とを組み合わせたハイブリッド航法によって車両位置を算出する。
【0053】
ハイブリッド航法では例えば、最初の位置決定を含めた、時々の数値補正のときにGPS航法を用い、それ以外のときは自律航法によって車両の進行方向及び走行距離を時々刻々算出し、それを積算していくことにより、逐次車両位置を算出していく。ハイブリッド航法を使用することによって、GPS航法ではトンネル内や建築物の陰でGPS衛星からの電波が受信しにくい状況では車両位置の算出が困難である問題点と、自律航法では走行距離を積算していくうちに誤差が累積していき車両位置の精度が低減する問題点とを互いに補うことができるので、高精度に車両位置が算出できる。
【0054】
そして、ハイブリッド航法によって得られた車両位置をマップマッチング法によって修正すればよい。マップマッチング法では、ハイブリッド航法によって得られた車両位置がDB703が有する地図と照らし合わせて不適切な位置であるとみなされた場合には、DB703が有する地図に整合させて、より適切な車両位置に修正する。なお上記においてナビ部7の情報処理は、ナビ部7自体がCPUを備えて実行してもよい。
【0055】
以上の構成のもとで検知システム1は、車両2の側方に位置する道路上の区画線をリアルタイムで検知して、車線のなかにおける車両2の現在位置を算出する。その際に道路の舗装部分であるか否かで検知方法を変更する。その処理手順は図3に示されている。図3(及び後述の図4から図10)のフローチャートはプログラム化して予め例えばROM302に記憶しておき、CPU300が自動的にそれを呼び出して実行するとすればよい。なお本実施例で道路上の区画線(道路区画線、車線区画線)とは、道路と道路以外を区画する区画線でもよく、複数車線間を区画する区画線でもよい。また区画線の色彩は白(白線)でも、橙色(橙線)でもよい。以下の説明では、白線の場合を説明し、さらに舗装部分であるか否かの例として継目であるか否かの場合を説明する。
【0056】
図3の処理では、車両2から見たときの側方両側の白線位置を繰り返し検知する。基本的な流れは、S10からS50の処理によって今回(現在)の白線位置を算出する。その際、現在継目を通過中であるか否かを判定して(S30)、継目であるか否かで、異なる方法で白線位置を検知する(S40、S50)。
【0057】
具体的な処理手順は以下のとおりである。まず手順S10でLD304からレーザ光を照射する。具体的には、LD304からレーザをミラー306に向けて発光し、ミラー306が回動しながらミラー面でレーザを反射して、その反射光が車両側方下方の路面へと照射される。LD304からはパルス状のレーザ光が発光されるとすればよい。
【0058】
ミラー306のミラー面は、ミラー306の回動軸と平行あるいは斜め方向に複数形成されており、各ミラー面の回動軸からの傾斜角度は異なるとする。これにより、各ミラー面からの反射光が1本の走査線に形成される。そして各ミラー面の傾斜角度が異なることにより、異なった2つのミラー面により反射されたレーザ光は、2本の異なる(平行な)走査線となる。
【0059】
ミラー306が1周することにより1組の平行な走査線が形成される。こうして図1に示されているように、車幅方向(図1においては横方向)に形成された複数の走査線10が、車両進行方向(図1においては縦方向)に平行に並ぶかたちで形成される。
【0060】
次にS20で反射光を受光する。上述のとおり路面からの反射波を受光したPD307の出力からは、路面の反射強度が取得できるとする。その例が図11に示されている。同図のプロットの例では、各ライン(走査線)の受光波における反射強度とスキャン角度との関係が示されている。図11(a)、(b)に示されているように、レーザ光を照射した(反射光が反射した)路面が継目でない場合(a)は、白線部分とそれ以外とで反射強度の差が大きいが、継目(b)においては、白線以外の領域における(ノイズによる)反射強度が相対的に大きく、白線部分との間で差が小さい。
【0061】
次にS30で車両2が現在継目上を走行中である(現在の反射光が反射した路面が継目である)か否かが判定される。その判定処理の具体例は図4から図7に示されている。その詳細は後述する。車両2が現在継目上を走行中である場合(S30:YES)はS40に進み、継目上を走行中でない場合(S30:NO)はS50に進む。
【0062】
S40では継目時における白線位置算出処理を実行する。その例は図8と図9とに示されている。その詳細は後述する。S50では非継目時における白線位置算出処理を実行する。その例は図10に示されている。その詳細は後述する。
【0063】
CPU300はS70で図3の処理を終了するか否かを判断する。例えばイグニションオフなどがあった場合、図3の処理を終了する(S70:YES)。この処理を終了しない場合(S70:NO)はS10に戻って上記手順を繰り返す。以上が図3の処理手順である。
【0064】
次に図4から図7を説明する。上述のとおり図4から図7には継目判定処理の4つの例が示されている。まず図4に示された継目判定処理の第1の例を説明する。
【0065】
図4の処理手順ではまずS100で、図11に示されたようなプロットのなかで反射強度の数値が閾値以上となったパルス光(スキャン角度)の数(あるいは区間)を算出する。閾値は予め適切に定めておいてROM302などに記憶しておけばよい。
【0066】
次にS110以降で、反射強度の波形が所定のパターンであれば継目を走行中であると判定する。ここで所定のパターンとは、図4の例では、反射強度の波形全体において上記閾値以上の区間が所定の比率より大きいことであるとする。したがってまずS110で、S100で求めた区間の全区間に対する比率を算出する。
【0067】
次にS120で、S110で求めた比率が所定値よりも大きいか否かを判定する。所定値は例えば30%、40%などと定めておけばよい。所定値よりも大きい場合(S120:YES)はS130に進み、所定値以下の場合(S120:NO)はS140に進む。
【0068】
S130に進んだ場合は反射強度が閾値以上の区間の全区間に対する比率が大きい場合である。これは図11(b)に示したように、継目通過中で白線以外の部分におけるノイズの反射強度が白線部の反射強度に近いほど大きい場合であるとみなせる。したがってS130では現在継目を通過中であると判定する。
【0069】
一方S140に進んだ場合は反射強度が閾値以上の区間の全区間に対する比率が小さい場合である。これは図11(a)に示したように、継目通過中でなく白線以外の部分におけるノイズ(の反射強度)が白線部と比較してかなり小さい場合であるとみなせる。したがってS140では現在継目を通過中ではないと判定する。以上が図4の処理である。
【0070】
次に図5に示された継目判定処理の第2の例を説明する。図5の例においては、上記でも触れたとおり、車両側方へ向けてレーザ光を照射するだけでなく、車両前方に向けてもレーザ光を照射する。
【0071】
この目的のためにLD304、駆動部305、ミラー306、PD307、受光レンズ308を、車両前面にも装備する。レーザ光の照射及び受光の仕組みは上記と同様とすればよい。そしてその配置位置は、車両前面に、例えば1組、あるいは車両前面左右に2組装備すればよい。
【0072】
図5の処理ではまず手順S200で上記のとおり車両前面に装備されたLD304から前方にレーザ光を照射する。そしてS210でそれが路面で反射した反射光を受光する。
【0073】
次にS220で、S210で受光した反射光から継目位置を検出し記憶する。ここでは、例えばパターンマッチングの手法により検出すればよい。すなわち具体的には、受光した反射光による画像において、エッジ抽出を実行し、その結果得られた画像と、予め記憶しておいた路面上の白線の画像パターンとのマッチングを実行する。
【0074】
このマッチング処理により白線を認識し、さらにその白線画像が途切れている部分が所定値よりも大きい場合に、それが道路の継目であると認識する。そして継目の車両2から見た相対的位置を、画像内での位置から推定する。例えば以上の手法により継目位置が検出できる。この継目位置情報はRAM301などに記憶しておけばよい。
【0075】
次にS230で車速情報を取得する。これは車速計の数値を車内通信により取得すればよい。次にS240で、S230で取得した車速から走行距離を算出して、その情報から、S210で検知した継目位置に現在到達したか否かを判定する。
【0076】
継目位置に到達したと判定された場合(S240:YES)はS250に進み、到達していないと判定された場合(S240:NO)はS260に進む。S250では現在継目を通過中であると判定し、S260では現在継目を通過中でないと判定する。以上が図5の処理である。
【0077】
次に図6に示された継目判定処理の第3の例を説明する。この例においてはナビ部7を用いて継目判定を実行する。
【0078】
図6の処理では手順S300でGPS信号を受信する。これは上述のとおりGPS受信部700により受信すればよい。それにより上述のナビの各種手法を用いて車両2の位置を算出する。そしてS310で、その車両位置とDB703に記憶された継目の位置情報とから、現在車両が継目を通過中であるか否かを判定する。
【0079】
車両2が現在継目を通過中であると判定された場合(S310:YES)はS320に進み、継目を通過中でないと判定された場合(S310:NO)はS330に進む。S320では現在継目を通過中であると判定し、S330では現在継目を通過中でないと判定する。以上が図6の処理である。
【0080】
なお図1において、ナビ部7は、図6の処理のためだけの専用装置としてもよく、いわゆるカーナビゲーション装置(カーナビ装置)を兼用するとしてもよい。カーナビ装置を兼用する際には、カーナビ装置における通常の地図情報データベースに継目位置情報を付加したデータベースをDB703とすればよい。
【0081】
次に図7に示された継目判定処理の第4の例を説明する。この例では車車間通信あるいは路車間通信を用いて継目判定を実行する。
【0082】
車車間通信の場合、図7の処理ではまず手順S400で、無線通信部6を用いて前方の車両8から継目位置の情報を取得し、記憶する。前方の車両8では、例えば本実施例(図4から図6)で示された何らかの方法で継目位置を検出しているとする。自車両では、前方の車両8から取得した継目位置を例えばRAM301に記憶しておく。
【0083】
S400では路車間通信により道路インフラストラクチュア9(道路インフラ)から継目位置情報を取得するとしてもよい。道路インフラ9としては、例えば路側機として設置された専用狭域無線通信(DSRC:Dedicated Short−Range Communications)によるDSRCビーコン(DSRC路上機)や、近赤外線通信による光ビーコン等とすればよい。
【0084】
次にS410で車速情報を取得する。これは車速計の数値を車内通信で取得すればよい。次にS420で、S410で取得した車速から走行距離を算出して、その情報から、S400で取得した継目位置に現在到達したか否かを判定する。
【0085】
車両2が継目位置に到達したと判定された場合(S420:YES)はS430に進み、到達していないと判定された場合(S420:NO)はS440に進む。S430では現在継目を通過中であると判定し、S440では現在継目を通過中でないと判定する。以上が図7の処理である。
【0086】
なお図7の説明における前方車両とは、例えば隊列(縦列)を組んだ車両における先頭車両としてもよい。さらに隊列を組んだ車両は自動走行車両の列としてもよい。
【0087】
次に図8と図9とを説明する。上述のとおり図8と図9には継目時白線位置算出処理の2つの例が示されている。まず図8に示された継目時白線位置算出処理の第1の例を説明する。
【0088】
図8の処理ではまず手順S510で、予測範囲内の各走査線の反射光の反射強度の積を算出する。正確には、反射光の全走査線における、車幅方向の同一位置の反射強度の数値の積を求める。その例が図12に示されている。車幅方向の同一位置とは、例えば図12では同じスキャン角度のことを指す。
【0089】
上述のとおり、継目においては白線(区画線)部分の反射強度とそれ以外の領域の反射強度との差が小さい。しかし図12に示されているように、(図12の例では3ラインの)積を算出することによって、白線部分とそれ以外の領域との反射強度の差が拡大(強調)される。したがって閾値(図12参照)を適切に設定して、それ以上とそれ未満とで分けることにより、以下で示すとおり白線部分のみが検知できる。なおS510では各走査線の反射強度の和を算出してもよい。和によっても白線部分とそれ以外の領域との反射強度の差が拡大(強調)される。
【0090】
次にS520で、反射強度が閾値以上の部分があるかを判定する。閾値以上の部分がある場合(S520:YES)はS540に進み、閾値以上の部分がない場合(S520:NO)は、白線検知不能(エラー)として、図8の処理を終了する。
【0091】
S540に進んだ場合は、反射強度が閾値以上の範囲があり、それが通常の白線幅に相当するので、実際に白線位置を算出する。具体的には、例えば閾値以上の領域の左右両端を白線の両端と認識すればよい。そして、白線の左右両端の中央を白線の中心位置(あるいは単に白線位置)として算出すればよい。
【0092】
次に図9に示された継目時白線位置算出処理の第2の例を説明する。この例では、継目通過時には車両側方の構造物を検知して白線位置を算出する。
【0093】
図9の処理ではまず手順S600で、車両側方へレーザ光を照射する。このレーザ光照射は、S10におけるレーザ光照射の照射範囲を車両側方にまで拡大することにより実行できる。その例が図13に示されている。次にS610で、そのレーザ光が、車両側方の路面、及び車両側方の構造物に反射した反射波を受光する。
【0094】
次にS620で、レーザ光の往復時間を算出する。すなわちレーザ光がLD304で照射されてから、路面及び車両側方で反射した反射波をPD307が受光するまでの時間を計測する。この目的のためにCPU300が時間測定機能を有するとすればよい。
【0095】
次にS630で、路面、及び車両側方の(表面)形状を算出する。具体的には、レーザ光の照射方向(スキャン角度)ごとに、その方向におけるレーザ光の往復時間から算出された構造物(レーザ光が反射した対象物)までの距離をプロットすればよい。当然構造物までの距離は、S620で計測した往復時間に電磁波の速度(光速度)を乗算することにより算出する。
【0096】
次にS640で側方の構造物を検出する。つまりS630で算出した形状から、車両2の側方にある構造物を認識する。ここで構造物とは道路に固定されて、且つ区画線(白線)と平行に設置された構造物(道路構造物、路上構造物)とすればよい。その例としてはガードレールや道路の側壁とすればよい。これらの構造物の認識のために、予めガードレールや側壁の、車両側から見たときの表面形状のモデルを記憶しておき、これらのモデル形状と計測した形状とのパターンマッチングを実行する。
【0097】
そしてS650で白線位置を算出する。具体的には、S640で算出したガードレールや側壁の位置を基準にして、白線位置を推定する。この目的のために、予めガードレールや側壁と白線(道路区画線)との間の平均的な位置関係を例えばROM302に記憶しておけばよい。
【0098】
上述のとおりS600におけるレーザ光照射は、S10での照射の照射範囲の拡大としてもよい。この場合S600のレーザ光照射は白線検知のためのLDなどを兼用する。またこの場合、同じ反射光から反射強度と往復時間の2つの数値を取得することとなる。あるいはS10のためのLD304のほかに、S600のためのLD304を別個に装備してもよい。
【0099】
次に図10を説明する。上述のとおり図10には非継目時白線位置算出処理の例が示されている。
【0100】
図10の処理ではまず手順S710で、反射強度が閾値以上の部分があるかを判定する。閾値以上の部分がある場合(S710:YES)はS730に進み、閾値以上の部分がない場合(S710:NO)は、白線検知不能(エラー)として、図10の処理を終了する。
【0101】
S730に進んだ場合は、反射強度が閾値以上の範囲があり、それが通常の白線幅に相当する場合である。したがって各ラインごとに、白線位置を算出する。上述のとおり、継目通過中でない場合には、白線(区画線)部分の反射強度とそれ以外の領域の反射強度との差が大きいので、精度よく白線位置が算出できる。具体的には、例えば閾値以上の領域の左右両端を白線の両端と認識すればよい。そして、白線の左右両端の中央を白線の中心位置(あるいは単に白線位置)として算出すればよい。
【0102】
そしてS740で全ラインにおける白線位置の平均を算出する。この平均値を白線位置とすればよい。非継目走行時にはノイズの影響が小さいので、図10の手順で精度よく白線位置が検知できる。
【0103】
本実施例では、図3から図10の処理により白線位置、あるいはさらに車両位置が検出されたことを受けて、例えば以下の各処理を実行すればよい。
【0104】
まず報知部4で報知処理を実行する。具体的には、車両2の運転者に対して車両2が車線の端に寄りすぎていることを報知(警告)する。これは車両2と白線との間隔が所定値よりも近くなりすぎた場合にのみ実行すればよい。
【0105】
また車両2で自動運転が実行されている場合には、車両操作ECU5による自動運転で、図3から図10の処理で取得した白線位置、車両位置の情報を利用するとすればよい。例えば、車両2の横方向の位置が車線中央となるようにステアリングを自動制御する。これは走行の安全性を向上させる。
【0106】
あるいは、車両2の横方向の位置が先行車両と同じ位置となるように、ステアリングを自動制御する。この制御を実行した場合、先行車両の存在で空気抵抗を低減できるので、燃費向上のために有効である。この目的のために先行車両の位置情報を、先行する別の車両8から無線通信部6を通じて車車間通信で取得すればよい。
【0107】
上記実施例では白線検知の場合を説明したが、上述のとおり本発明はこれに限定されず、道路の区画線一般の検知に用いることができる。また上記では道路の継目か否かを判定したが、これに限定せず、舗装部分すなわち平坦なアスファルト舗装か否かを判定するように変更することができる。
【符号の説明】
【0108】
1 検知システム
2 車両
3 検知部
304 レーザダイオード(LD)
306 ミラー
307 フォトダイオード(PD)
【特許請求の範囲】
【請求項1】
車両に備えられて、車両の側方の路面へ向けて複数の走査線からなる電磁波を照射する発光部と、
その発光部から照射された電磁波が路面で反射して形成された反射波を受光する受光部と、
その受光部が受光した反射波が反射した路面が舗装部分であるか否かを判定する判定手段と、
その判定手段が舗装部分だと判定した場合と舗装部分でないと判定した場合とで異なった方法を用いて、前記受光部が受光した反射波から路面上の区画線を検知する検知部と、
を備えたことを特徴とする検知装置。
【請求項2】
前記判定手段は、道路の継目を前記舗装部分でないと判定する請求項1に記載の検知装置。
【請求項3】
前記検知部は、前記判定手段が舗装部分でないと判定した場合に、前記受光部が受光した反射波の各走査線における車幅方向の同一位置における反射強度の積又は和を算出して、その算出結果が所定の閾値よりも大きい領域を路面上の区画線として検知する第1の検知手段を備えた請求項1又は2に記載の検知装置。
【請求項4】
前記検知部は、前記判定手段が舗装部分であると判定した場合に、前記受光部が受光した反射波の各走査線における反射強度が所定の閾値よりも大きい領域を前記区画線として検知し、検知した前記区画線の位置の平均を算出する請求項1乃至3のいずれか1項に記載の検知装置。
【請求項5】
前記車両から側方へ電磁波を照射して、道路に固定され且つ区画線と平行に設置された構造物である道路構造物を検知する構造物検知部を備え、
前記検知部は、前記判定手段が舗装部分でないと判定した場合に、前記構造物検知部が検知した道路構造物の位置と、路面上の区画線との位置関係から、路面上の区画線の位置を検知する第2の検知手段を備えた請求項1乃至4のいずれか1項に記載の検知装置。
【請求項6】
前記構造物検知部は、前記発光部及び受光部と兼用である請求項5に記載の検知装置。
【請求項7】
前記判定手段は、反射波の反射強度に対して閾値を設けて、前記受光部が受光した反射波において反射強度が前記閾値を超える区間の総計が所定値よりも大きい場合に舗装部分でないと判定する第1の判定手段を備えた請求項1乃至6のいずれか1項に記載の検知装置。
【請求項8】
前記判定手段は、
車両前方に電磁波を照射する副発光部と、
前記副発光部が照射した電磁波が路面で反射して形成された反射波を受光する副受光部と、
前記副受光部が受光した反射波を用いて、前記反射波が反射した路面が舗装部分であるか否かを判定する第2の判定手段を備えた請求項1乃至6のいずれか1項に記載の検知装置。
【請求項9】
GPS衛星からのGPS信号を受信するGPS受信部と、
路面における舗装部分以外の位置情報を記憶した記憶部と、
を備え、
前記判定手段は、前記GPS受信部が受信したGPS信号から車両の現在位置を算出し、その現在位置を前記記憶部が記憶する舗装部分以外の位置情報とを参照して、現在位置が舗装部分であるか否かを判定する第3の判定手段を備えた請求項1乃至6のいずれか1項に記載の検知装置。
【請求項10】
車両とその外部の通信対象との間で無線通信を行う無線通信部と、
前記車両の車速を取得する取得手段と、
を備え、
前記判定手段は、前記無線通信部が前記通信対象から無線通信で取得した舗装部分の位置情報と、前記取得手段が取得した前記車両の車速の情報とから、前記車両の現在位置が舗装部分であるか否かを判定する第4の判定手段を備えた請求項1乃至6のいずれか1項に記載の検知装置。
【請求項11】
前記通信対象には前記車両とは異なる車両が含まれる請求項10に記載の検知装置。
【請求項12】
前記通信対象には道路インフラストラクチュアが含まれる請求項10又は11に記載の検知装置。
【請求項13】
前記道路構造物には道路のガードレールが含まれる請求項5に記載の検知装置。
【請求項14】
前記道路構造物には道路の側壁が含まれる請求項5又は13に記載の検知装置。
【請求項1】
車両に備えられて、車両の側方の路面へ向けて複数の走査線からなる電磁波を照射する発光部と、
その発光部から照射された電磁波が路面で反射して形成された反射波を受光する受光部と、
その受光部が受光した反射波が反射した路面が舗装部分であるか否かを判定する判定手段と、
その判定手段が舗装部分だと判定した場合と舗装部分でないと判定した場合とで異なった方法を用いて、前記受光部が受光した反射波から路面上の区画線を検知する検知部と、
を備えたことを特徴とする検知装置。
【請求項2】
前記判定手段は、道路の継目を前記舗装部分でないと判定する請求項1に記載の検知装置。
【請求項3】
前記検知部は、前記判定手段が舗装部分でないと判定した場合に、前記受光部が受光した反射波の各走査線における車幅方向の同一位置における反射強度の積又は和を算出して、その算出結果が所定の閾値よりも大きい領域を路面上の区画線として検知する第1の検知手段を備えた請求項1又は2に記載の検知装置。
【請求項4】
前記検知部は、前記判定手段が舗装部分であると判定した場合に、前記受光部が受光した反射波の各走査線における反射強度が所定の閾値よりも大きい領域を前記区画線として検知し、検知した前記区画線の位置の平均を算出する請求項1乃至3のいずれか1項に記載の検知装置。
【請求項5】
前記車両から側方へ電磁波を照射して、道路に固定され且つ区画線と平行に設置された構造物である道路構造物を検知する構造物検知部を備え、
前記検知部は、前記判定手段が舗装部分でないと判定した場合に、前記構造物検知部が検知した道路構造物の位置と、路面上の区画線との位置関係から、路面上の区画線の位置を検知する第2の検知手段を備えた請求項1乃至4のいずれか1項に記載の検知装置。
【請求項6】
前記構造物検知部は、前記発光部及び受光部と兼用である請求項5に記載の検知装置。
【請求項7】
前記判定手段は、反射波の反射強度に対して閾値を設けて、前記受光部が受光した反射波において反射強度が前記閾値を超える区間の総計が所定値よりも大きい場合に舗装部分でないと判定する第1の判定手段を備えた請求項1乃至6のいずれか1項に記載の検知装置。
【請求項8】
前記判定手段は、
車両前方に電磁波を照射する副発光部と、
前記副発光部が照射した電磁波が路面で反射して形成された反射波を受光する副受光部と、
前記副受光部が受光した反射波を用いて、前記反射波が反射した路面が舗装部分であるか否かを判定する第2の判定手段を備えた請求項1乃至6のいずれか1項に記載の検知装置。
【請求項9】
GPS衛星からのGPS信号を受信するGPS受信部と、
路面における舗装部分以外の位置情報を記憶した記憶部と、
を備え、
前記判定手段は、前記GPS受信部が受信したGPS信号から車両の現在位置を算出し、その現在位置を前記記憶部が記憶する舗装部分以外の位置情報とを参照して、現在位置が舗装部分であるか否かを判定する第3の判定手段を備えた請求項1乃至6のいずれか1項に記載の検知装置。
【請求項10】
車両とその外部の通信対象との間で無線通信を行う無線通信部と、
前記車両の車速を取得する取得手段と、
を備え、
前記判定手段は、前記無線通信部が前記通信対象から無線通信で取得した舗装部分の位置情報と、前記取得手段が取得した前記車両の車速の情報とから、前記車両の現在位置が舗装部分であるか否かを判定する第4の判定手段を備えた請求項1乃至6のいずれか1項に記載の検知装置。
【請求項11】
前記通信対象には前記車両とは異なる車両が含まれる請求項10に記載の検知装置。
【請求項12】
前記通信対象には道路インフラストラクチュアが含まれる請求項10又は11に記載の検知装置。
【請求項13】
前記道路構造物には道路のガードレールが含まれる請求項5に記載の検知装置。
【請求項14】
前記道路構造物には道路の側壁が含まれる請求項5又は13に記載の検知装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−210165(P2011−210165A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−79487(P2010−79487)
【出願日】平成22年3月30日(2010.3.30)
【国等の委託研究の成果に係る記載事項】(出願人による申告)国等の委託研究の成果に係る特許出願(平成21年度独立行政法人新エネルギー・産業技術開発機構「エネルギーITS推進事業/協調走行(自動運転)に向けた研究開発」、産業技術力強化法第19条の適用を受ける特許出願)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月30日(2010.3.30)
【国等の委託研究の成果に係る記載事項】(出願人による申告)国等の委託研究の成果に係る特許出願(平成21年度独立行政法人新エネルギー・産業技術開発機構「エネルギーITS推進事業/協調走行(自動運転)に向けた研究開発」、産業技術力強化法第19条の適用を受ける特許出願)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]