
Fターム[5J084BA48]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754)
Fターム[5J084BA48]の下位に属するFターム
1次元走査を行うもの (148)
2次元走査を行うもの (270)
Fターム[5J084BA48]に分類される特許
1 - 20 / 336
無人走行体を用いた環境情報の取得システム
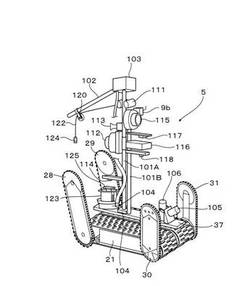
【課題】粉塵、煙又は水蒸気が立ち込める劣悪な環境下においても構築物内の環境を正確に取得可能な環境情報の取得システムを提供する。
【解決手段】遠隔操縦装置を用いてオペレータにより遠隔操縦される無人走行体5に、走査式二次元測距装置105と、放射線検出器116を搭載する。また、安全な場所には、遠隔操縦装置を備えた制御装置本体を設置する。制御装置本体は、遠隔操縦装置の操作内容に応じた制御信号を出力して無人走行体5の走行制御を行いながら、走査式二次元測距装置105の検出データから生成される三次元画像と、放射線検出器116の検出データを合成し、制御装置本体に接続された表示装置に表示する。
(もっと読む)
距離測定装置

【課題】距離測定装置において、比較的小型の構成で受光効率を向上して比較的広い距離検出範囲で距離を測定可能とすることを目的とする。
【解決手段】2次元スキャナおよび投光角拡大レンズを含み投光ビームを前方に投光する投光系と、投光系のビーム走査角度と同等以上の受光視野角を有すると共に受光に関する第1の光路が投光角拡大レンズの投光に関する第2の光路と独立しており投光角拡大レンズより前方、且つ、投光ビームの投光領域より後方に配置された受光レンズを含む受光系とを備えるように構成する。
(もっと読む)
シーン内の対象物を3D再構成するための方法
【課題】シーン内の対象物を3D再構成するための方法を提供する。
【解決手段】ステップ1)検知された信号から、その後方散乱の強度がそれぞれ割り当てられる3Dポイントを生成し、更に3Dポイントが、再構成されたデータのセットAを形成するステップ。ステップ2)Aから開始して、対象物を含む空間内にそのポイントが配置されたデータのセットBを、空間特性F2に応じて抽出するステップ。ステップ3)Bから開始して、データのセットCを、抽出基準に応じて抽出するステップ。ステップ4)Cに基づいて、3次元表面を生成して対象物の完成データのセットDを得ることにより、喪失部分をもつ領域を埋めるステップ。ステップ5)Dに基づいて対象物を識別するステップ。ステップ5)の識別に成功しなかったとき、ステップ3)、4)および5)を新規の基準F1で繰り返す。
(もっと読む)
レーダ装置
【課題】一発測距方式及び積分測距方式で測距を行うレーダ装置において、測距方式の切り替えを状況に応じて的確に実施できるようにする。
【解決手段】一発測距方式による測距と積分測距方式による測距とを並行して実施し、一発測距方式による第1測距値D1、積分測距方式による第2測距値D2と共に、受信信号のパルス幅を表す強度パラメータPを取得し(S110)、強度パラメータPが判定閾値Pthより大きければ(S120−YES)、第1測距値D1を距離情報として選択し(S130)、強度パラメータPが判定閾値Pth以下であれば(S120−NO)、第2測距値D2を距離情報として選択する(S140)。このように受信信号の信号強度ではなく、反射光の強度と相関を有する強度パラメータP(受信信号Rのパルス幅)を用いているため、受信信号Rが飽和している場合でも、反射光の強度を正しく把握することができ、その結果、その時々の状況に応じた測距値の選択を的確に行うことができる。
(もっと読む)
無線方式レーザスキャナ設定取得方法
【課題】レーザ光を使用したレーザ計測システムにおけるレーザスキャナに関して、従来のようにコード等の有線に影響されることなく、安全且つ自在に、レーザスキャナのエリア設定及び計測結果の取得を遠隔から行うことができるようにした無線方式レーザスキャナ設定取得方法を提供する。
【解決手段】レーザ光を発射する発光部と発射したレーザ光の反射光を受光する受光部とを有するレーザ計測装置に、レーザ光の発光時と反射光の受光時との時間差により測定対象物までの距離を計測する距離計側部からの計測信号を遠隔制御装置に無線通信によって送信する一方、遠隔制御装置からの制御信号をレーザ計測装置に無線通信によって送信することにより、遠隔制御装置で、レーザ計測装置によって計測された計測結果の取得とレーザ計測装置に設定すべき信号の制御とを行うようにした。
(もっと読む)
レーザオルソ画像生成装置及びそのプログラム
【課題】高密度のレーザデータを用いてオルソフォトと同様な画像を容易に得ることができるレーザオルソ画像作成装置を得る。
【解決手段】移動に伴って周囲に数センチ間隔でレーザデータを発射して得た高密度のレーザデータ(x、y、z、反射強度in、RGB値、発射時間、受信時間)を記憶したデータベース10と、メッシュレイヤ作成処理部11と、レーザデータ投影処理部12と、道路部分抽出処理部13と、レーザオルソ画像作成部14と、データエリア図表示部15等を備えて、画像メモリのピクセルに含まれるレーザデータを決定し、このレーザデータ群の中から所定のレーザデータの反射強度に基づく色(グレースケール等)をそのピクセルに付与し、道路面を鉛直からみたレーザオルソ画像を作成する。また、道路面のレーザオルソ画像においては、道路部分以外の点を除去する。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲において三次元的に物体を認識し得るレーザレーダ装置において、駆動制御の複雑化を抑え、三次元的な認識の高速化を図り得る構成を提供する。
【解決手段】レーザレーダ装置1には、複数の受光素子が二次元的に配置されてなる受光センサ20が設けられ、この受光センサ20は、反射部31によって反射光が反射される側に配置され、反射部31によって導かれた反射光を受光領域にて受光する構成をなしている。一方、レーザダイオード10から外部空間に照射されるまでのレーザ光L1の投光経路には、凸状鏡が配置され、偏向部41から外部空間に向かうレーザ光L1を少なくとも中心軸42aの方向に拡がらせている。そして、外部空間からの反射光が偏向部41に入射するときの入射の向きに対応して受光領域での反射光の入射位置が定まるように構成されている。
(もっと読む)
光ビームスキャナ及びレーザレーダユニット
【課題】水平方向の広い角度を走査した場合においても垂直方向において変動の少ない光ビームスキャナを提供する。
【解決手段】光源と、前記光源からの光を走査する光スキャナと、前記光源より出射された光ビームを前記光スキャナに入射させるための入力光学系と、を有し、前記光スキャナは、回転軸を中心に回転する回転ミラーであって、前記光源より入射した光ビームを反射するミラーを有しており、前記回転ミラーが前記回転軸を中心に回転することにより、前記光ビームは、前記ミラーのミラー面において異なる位置に照射されるものであって、前記ミラーにおけるミラー面は、前記回転軸に垂直な面に平行な方向において、前記ミラーの一方の側から他方の側に向かって、前記回転軸に平行な方向に対するミラー面傾き角が徐々に増加していることを特徴とする光ビームスキャナを提供することにより上記課題を解決する。
(もっと読む)
自己位置推定装置、方法、及びプログラム
【課題】自己位置の推定精度を向上させる。
【解決手段】自己位置推定装置1は、移動体の複数の視点から取得される環境データに基づいて視点毎に二次元マップを作成するマップ作成部2と、複数の二次元マップの中から直線部が比較的多い二次元マップを抽出するマップ抽出部3と、抽出された二次元マップと、当該抽出された二次元マップと同一の視点から取得される環境データとの照合結果に基づいて、移動体の自己位置を推定する位置推定部4とを備える。
(もっと読む)
滞留度検出装置及び乗客コンベア
【課題】利用者の足元を見ることで倒れを検知する装置を用いて、利用者の人数(占有率)と歩行速度に基づいて乗降口付近での滞留度を検出する滞留度検出装置、及び、乗客コンベアを得る。
【解決手段】人が滞留していることを検出する走査範囲である検知エリアに水平面状にレーザビームを放射するスキャン型距離センサ7を備え、スキャン型距離センサ7は、乗客の足元を見るように設置され、測定した角度毎の距離を蓄積し、スキャン型距離センサで捉えた検知エリア内のデータから人数と、足の静止時間により算出した歩行速度に基づいて警報や停止等の制御指令を出す。
(もっと読む)
レーダ装置
【課題】発光部で発生する電磁ノイズが受光部に与える影響を抑制した小型化可能なレーダ装置を提供する。
【解決手段】発光部10を、発光部シールド17及び偏光分離素子14が形成する電磁遮蔽空間内に配置する。これにより、発光部10がレーザ光を照射する時に発生させる電磁ノイズが、発光部シールド17の開口部から外部に漏洩することを抑制することができる。つまり、発光部10にて発生し、受光部12に干渉する電磁ノイズの影響を低減することができるため、発光部10と受光部12とを接近配置させて装置を小型化しても、電磁ノイズの影響の少ない受光信号を得ること、ひいては正常な測距を行うことができる。
(もっと読む)
計測システムおよび計測方法
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
距離画像生成装置
【課題】光飛行時間型距離画像センサを用いて撮影空間の距離画像生成する際、撮影空間内の状況によらず、距離計測の精度を高める。
【解決手段】距離画像と同タイミングで生成した同撮像空間の照射光強度画像を用い、撮影空間に他の画素の画素値算出に影響を与える程入射光(反射光)強度の強い領域があるか否かを判別する。反射光の強い領域がある場合、その領域への照射と他の領域への照射とを独立して制御する分割照射を行うよう光源を制御する。判別は、照射光強度画像の各画素値を予め定めた閾値と比較することにより行う。
(もっと読む)
信号処理装置
【課題】複数のAD変換器を用いて同一のアナログ信号をAD変換する信号処理装置において、個々のAD変換器の特性のばらつきによって生じる同一のアナログ信号のAD変換精度の低下を抑制する。
【解決手段】クロック生成部58はπ[rad]位相の異なる二つのクロックを生成し、対象信号供給部52は受信信号RSまたは0VのいずれかをAD変換部68の二つのAD変換器72、74に供給する。被補正データ生成部86は、AD変換部68が受信信号RSをAD変換した結果に基づき、読出データRDを生成する。オフセットデータ生成部76は、AD変換部68が基準電圧をAD変換した結果に基づき、AD変換器72、74毎の測定誤差を表すオフセットデータAZ1、AZ2を生成する。補正部100は、読出データRDからオフセットデータAZ1、AZ2分を除去する補正処理を実行し、サンプリングデータSDを生成する。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
レーザ誘導装置
【課題】 レーザ発振部と受信部を備えた飛しょう体において、目標と背景を高精度で分離するとともに遮蔽物の陰に隠れた目標を検出し、背景への誤追尾を防止し、目標に対して精密に誘導することのできる誘導装置を得る。
【解決手段】 目標を含む走査範囲にレーザ光を照射する。反射光を検出し、反射光の受信強度と受信までの遅延時間を用いて走査範囲の強度画像と3次元画像を生成する。得られた3次元画像から走査範囲の各位置における高度値の標準偏差を計算し、平面領域と非平面領域とを判定する。非判定領域に対して強度画像と3次元画像を組み合わせた目標認識処理を行って目標と背景を分離することにより、目標の認識確率を向上させる。また、背景領域の中の平面領域を基準として目標までの距離に応じたゲート時間を設定し、ゲート時間の間に受光した反射光に基づき、遮蔽物の陰に隠れた目標を検出する。
(もっと読む)
車両用制御装置
【課題】基準軸のずれが発生したことを精度よく検出することが可能な車両用制御装置を提供する。
【解決手段】運転者支援システムにおけるヘッド部では、車両に対する物標探査器7の姿勢変化量(傾斜量,加速度)を検知する姿勢検知器8が、物標探査器7とともに筐体30の内部に固定されており、制御部20が、姿勢検知器8にて検知した姿勢変化量が予め設定された閾値変化量(閾値傾斜量,第1の加速度)を上回る場合に、物標探査器7の基準軸のずれが発生したことを検出する。つまり、実際に物標探査器7が車両に対して所定量ずれている場合に、物標探査器7の基準軸のずれが発生しているものとみなすことにより、基準軸のずれが発生したことを精度よく検出することが可能となる。
(もっと読む)
監視装置および監視方法
【課題】消費電力の増大を抑制しつつ、移動体の詳細な情報を取得すること。
【解決手段】監視装置10は、光源LD11によって照射されるレーザー光を走査する走査範囲内に存在する物体によって反射されたレーザー光の反射光を用いて該物体を検知する。このとき、監視装置10は、物体が検知された場合には、走査範囲のうち当該物体が検知されたレーザー光の照射点を基準とする所定範囲外に含まれるレーザー光の照射点の数が第1の照射点数となるように光源LD11を発光させる。さらに、監視装置10は、走査範囲のうち当該物体が検知されたレーザー光の照射点を基準とする所定範囲内の照射点の数が第1の照射点数よりも多い第2の照射点数となるように光源LD11を発光させる。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲にわたる検出が可能であり、かつ3次元的な検出をも行いうるレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1は、レーザダイオード10と、フォトダイオード20とを有し、所定の中心軸42aを中心として回動可能に構成された偏向部41を備えるとともに、偏向部41によりレーザ光を空間に向けて偏向させ、且つ反射光をフォトダイオード20に向けて偏向する回動偏向機構40と、回動偏向機構40を回転駆動するモータ50とを備えている。さらに、レーザダイオード10を回転させるモータ70とこのモータ70を制御する制御回路80とを備え、モータ70によりレーザダイオード10を回転させることで、偏向部41に入射するレーザ光の入射方向を変化させ、偏向部41からのレーザ光の向きを、中心軸42aの方向に関して変化させるようにしている。
(もっと読む)
1 - 20 / 336
[ Back to top ]