
Fターム[5J084AA03]の内容
光レーダ方式及びその細部 (24,468) | 測定内容 (2,871) | 存在検知 (455) | 特に静止物体の存在検知 (33)
Fターム[5J084AA03]に分類される特許
1 - 20 / 33
距離計測装置
【課題】計測距離の精度向上を図る。
【解決手段】駆動部14によりレーザ光の照射方向が鉛直下方向になったときに計測される距離計測装置と地面との距離と、メモリに記憶された情報に基づいて特定される距離計測装置と地面との距離の差分から計測距離の総合誤差を算出し、この計測距離の総合誤差を用いて計測距離が補正する。
(もっと読む)
残置物検出方法及び装置

【課題】監視範囲が広い平面領域であっても、残置物の色合いの影響を受け難く、精度よく残置物を検出することができる残置物検出方法及び装置を提供する。
【解決手段】レーザ光を投光する投光部11と、レーザ光を水平方向に走査させる水平走査手段12と、レーザ光を垂直方向に走査させる垂直走査手段13と、レーザ光の反射光を受光して受光情報d4を発信する受光部14と、受光情報d4から残置物Mの距離を算出する距離演算部15と、投光部11、水平走査手段12及び垂直走査手段13の制御を行う制御部16と、を有するレーザセンサ10を備え、レーザセンサ10は、平面Spに近接した高さHに配置され、レーザセンサ10は、受光情報d4が不連続な計測点Pd又は孤立した計測点Piを含む場合に残置物Mとして検出するように構成されている。
(もっと読む)
車両用物体判定装置
【課題】自車20が旋回するときにも連続路側物を的確に検出する。
【解決手段】車両用物体判定装置10では、物体検出部13が、レーザ光の走査により前方物体情報を取得するとともに、進行軌跡予測部14は、旋回角センサ11からのヨーレート等や車速センサ12からの車速に基づき旋回進行軌跡32を算出する。物体判定部15は、自車20が直進中か旋回中かを判断して、旋回中は、旋回進行軌跡32に対して左右別々に判定エリア33L,33Rを設定する。そして、同一の判定エリアに存在する物体同士に限定して、それらが同一の連続路側物列の物体であるか否かの判定対象とする。具体的には、判定エリア33R内の物体をy座標位置を小さい順に番号付けし、番号が隣り同士の物体間のy軸方向距離を算出し、その平均値Baを算出し、Baと物体間のy軸方向距離との対比に基づき、各検出物体に対して連続路側物であるか否かを判定する。
(もっと読む)
レーザレーダ装置
【課題】レーザレーダ装置において、光源の寿命を低下させることなく、レーンマークおよび前方障害物を精度良く検出する。
【解決手段】レーザレーダ装置は、光ビームを発生させる光源と、前記光ビームを偏向させて、車両の進行方向を中心として前記車両の車幅方向に対して設けられた第1の走査角度範囲において走査する第1光走査部と、前記光ビームを偏向させて、前記車幅方向に対して左右に分割されている第2の走査角度範囲において走査する第2光走査部と、前記第1の走査角度範囲内に存在する障害物によって反射された前記光ビームの反射光を受光して、前記障害物を検出する障害物検出部と、前記第2の走査角度範囲内に存在するレーンマークによって反射された前記光ビームの反射光を受光して、前記レーンマークを検出するレーンマーク検出部と、を備える。
(もっと読む)
道路端検出装置、運転者支援装置、および道路端検出方法
【課題】自車両が走行する道路における端部の位置を検出する道路端検出装置において、精度よく道路端を検出できるような技術を提供する。
【解決手段】レーダ装置は、レーダ処理にて、個別領域を自車両の進行方向の左右方向に仮想的に多数並べて形成される検出対象領域の各個別領域に対してそれぞれ光波を照射し、この光波が被測定物に反射されることによる反射光を受光して、対物距離および反射強度をそれぞれ検出する(S110〜S140)。各個別領域のうちの隣接する個別領域で各対物距離の差が基準距離差以上となる第1境界と(S160)、各個別領域のうちの隣接する個別領域で各反射強度の差が基準強度差以上となる第2境界とを検出し(S170)、第1境界の位置または第2境界の位置を道路端として設定する(S180)。
(もっと読む)
検知装置
【課題】車両側方の道路の区画線を、道路の継目等を通過した場合においても検知可能な、ロバスト性に優れた検知装置を提供する。
【解決手段】車両が現在、道路の継目位置を通過中であるか否かを判定し、継目位置を通過中であるか否かで方法を変えて道路の区画線を検知する。特に継目位置通過中の場合は、車両側方に複数の走査線からなる検知波を照射し、路面からの反射波において全ての走査線の反射強度の積を算出して、区画線部分とそれ以外の領域での反射強度の差を大きくして、区画線位置を検知する。
(もっと読む)
障害物検知装置及び障害物検知方法
【課題】電線のような細い障害物であっても、これを適切に検知し、その高さから障害物と移動体の衝突可能性を判定する。
【解決手段】光源11、12はそれぞれ点光源であり、鉛直方向に対して傾いた角度をなす面状に発散する照射光111、121をそれぞれ発する。障害物100が線状であれば、この光って見える箇所は、照射光111のなす面と障害物100との交点、照射光121のなす面と障害物100との交点の2箇所であり、どちらの箇所も点状であるため、これらは輝点として見える。撮像部20は、少なくとも2つの輝点が視野に入り、これらが認識できるように設定される。これらを撮像した2次元画像中における2つの輝点の位置及びこれらの間の間隔から、制御部30は、光源11、12から障害物100の高さを算出し、移動体の最大高さとの関係から障害物100と移動体との衝突可能性を判定する。
(もっと読む)
ホーム判定装置およびホーム判定方法ならびにそのプログラム
【課題】精度高く駅ホームの有無を判定できるホーム判定装置を提供する。
【解決手段】駅ホームの高さより高い列車の設置位置に設置され、駅ホームの上面から側面までの測距領域における複数の測距点と、設置位置との間の複数の距離を測定する測距センサから、当該複数の測距点に対応する複数の距離の入力を受け付ける。そして、測距センサの設置位置と、測定した複数の距離と、当該各距離を測定した際の測距センサからのそれぞれのセンシング角度と、を用いて、測距点と、設置位置との間の複数の距離を測定した際の、測距点それぞれの高さを算出する。そして、測距点それぞれの高さの算出結果と、ホーム高の予想高さとの関係に基づいて、駅ホームの有無を判定する。
(もっと読む)
障害物検出装置
【課題】道路構造物を障害物として誤検出することを防止可能な障害物検出装置を提供する。
【解決手段】障害物検出装置1は、ECU2、実測データ生成部3および車両状態計測部4を備える。ECU2は、データベース5、予測データ生成部6および障害物検出部7を有する。実測データ生成部3は、車両周辺の所定領域に存在する物体からのレーダ反射に基づいて物体を検出し、検出結果を示す実測データを生成する。データベース5は、所定領域に存在する道路構造物に関する道路構造物データをあらかじめ保持する。車両状態計測部4は、車両の現在位置および現在姿勢を含む車両状態を計測する。予測データ生成部6は、車両状態および道路構造物データに基づいて、道路構造物からのレーダ反射を予測して予測結果を示す予測データを生成する。障害物検出部7は、実測データおよび予測データに基づいて障害物を検出する。
(もっと読む)
測距方法及び車載測距装置
【課題】床面に近い位置に置かれた障害物を精度良く検知できる測距方法を提供する。
【解決手段】発光部から出力された測定光を所定周期で繰り返し走査して対象物からの反射光を受光部に導き、測定光と反射光の検出時間差に基づいて対象物までの距離を算出する測距装置を車両に取り付けて、走査面が測定対象平面と交差するように測定光を走査して、測定対象平面または対象物までの距離を算出し、所定の走査角度で算出された距離に基づいて測定対象平面に平行な仮想平面を生成し、各距離を仮想平面からの鉛直距離に換算し、換算した鉛直距離と当該鉛直距離に対応する測定対象平面上の測定光の走査位置との相関を表す近似線を算出し、換算した鉛直距離が当該近似線から求まる鉛直距離より所定の閾値以上短い値を示す走査位置に対象物が存在すると検知する各ステップを所定の走査周期毎に繰り返す。
(もっと読む)
人体存在検知装置及び人体存在検知方法
【課題】低コストで実現可能であると共に、人体が存在するか否かの検知を、操作者である人体が操作する電子機器等の制御に適合しやすい人体存在検知装置を、提供する。
【解決手段】基準位置から一定距離内に、人体が存在するか否かの判断を行う機能を備えた人体存在検知装置1を、基準位置から一定方向に存在する人体または物の存在位置に対する基準位置からの離間距離を一定時間経過毎に測定する離間距離測定手段2、該測定された離間距離に基づき一定距離内外判定結果と動静判定結果とを形成する判定結果形成手段3、該一定距離内外判定結果と、該動静判定結果とで構成される検知状態情報を形成する検知状態情報形成手段4、該検知状態情報に基づき状態遷移パターンを形成する状態遷移パターン形成手段5、及び、該状態遷移パターンに基づき、基準位置から一定距離内に、人体が存在するか否かを判断する判断手段6で構成する。
(もっと読む)
レーダ装置
【課題】 先行車両のような障害物の向こう側に存在する先先行車のような物体についてもその位置等を正確に検出することを可能としたレーダ装置を提供する。
【解決手段】 物体に電磁波を照射し、その反射に基づいてその物体の位置を検出するレーダ(例えば、レーザレーダ1)の出力から距離・方位検出手段21により物体までの距離・方位を検出し、路面位置判定手段22で判定した路面位置に基づき、虚像物標判定・変換手段23は、判定した位置が路面より下に位置すると判定した場合には、路面に対して面対称な位置に変換した位置を物体の本来の位置とし、出力手段24により出力する。
(もっと読む)
障害物検出装置、及び障害物検出方法
【課題】障害物の誤検出を防止し、障害物の検出精度の向上を図ることができる障害物検出装置及び障害物検出方法を提供することを目的とする。
【解決手段】搬送車両3Aの位置姿勢情報を割り出す位置姿勢情報演算部15bと、搬送車両3Aの周囲環境に関する形状情報を取得する第2レーザスキャナ16と、障害物を検出すべき領域に関する走行ルートSに沿った検出領域情報を記憶する検出領域情報記憶部17aと、形状情報と検出領域情報とから障害物検出領域を割り出す障害物検出領域演算部17bと、その障害物検出領域に基づいて障害物を検出する障害物検出部17cとを備える。この障害物検出装置17Aによれば、非障害物である坑内設備等を障害物として誤検出することが防止され、障害物の検出精度の向上を図ることができる。
(もっと読む)
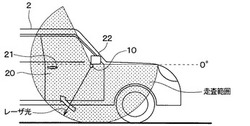
物体検出装置
【課題】高さ方向における探査波の走査機構を不要にした簡単な構成で、路面標示や路面に埋め込まれた反射物等の路面設置物や、歩道橋や上方に設置された看板等の上方設置物と、自車両の走行を妨げる停止車両等の障害物と、を区別して検出することができる物体検出装置を提供する。
【解決手段】レーダ装置1は、物体10を、ある程度離れた距離で検出したときの反射光量を基準反射光量とする。また、物体10を検出する毎に、この物体を障害物であると仮定し、基準反射光量を用いて、今回算出した距離での反射光量を推定する。推定した反射光量に対して、今回検出した反射光量が所定の割合未満であるかどうかによって、障害物であるかどうかを判定する。
(もっと読む)
障害物位置検出装置
【課題】飛び出しが多い箇所を収集し、危険箇所として認識することができる障害物位置検出装置を提供する。
【解決手段】障害物位置検出装置は、レーザレーダ1で自車前方の障害物を検出した場合、自車位置周囲の所定の建造物(例えばコンビニエンスストア等の建築物)の設置情報をカーナビゲーションシステム11から取得する。障害物位置検出装置は、障害物の相対的な位置変化から障害物の危険度を算出し、障害物の位置、建造物の設置情報、危険度をそれぞれ対応付けて危険箇所データベース8に登録する。
(もっと読む)
物体検出装置
【課題】処理負荷を抑えながら、高精度に線模様を検出する物体検出装置を提供する。
【解決手段】処理部12は、処理部22で白線を検出した場合に、当該白線の画像特徴量(彩度、色相)を算出する。さらに、処理部12は、画像全体において、算出した白線の画像特徴量に一致する画像特徴量を有する位置を検出する。そして、レーザレーダ装置2の処理部22で検出した白線の位置における画像とカメラで抽出した遠方の白線の画像とを合成する。
(もっと読む)
物体検出装置、および光軸ずれ検出方法
【課題】前方に光を投光する投光部の光軸と、この投光部が投光した光の反射光を受光する受光部の光軸と、のずれを検出することによって、光軸合わせにかかる作業性を向上させることができる物体検出装置を提供する。
【解決手段】投光部3は、LD31と、投光レンズ33との間に、LD31が出射した光を投光レンズ33に導く光導波路を形成する投光側ライトガイド32を有している。投光側ライトガイド32は、投光レンズ33に対向する出射面の平面形状が外周部の外側に突出する突出面を有する形状である。また、受光部4は、PD41と、受光レンズ43との間に、この受光レンズ43を介して受光した光をPD41に導く光導波路を形成する受光側ライトガイド42を有している。受光側ライトガイド42は、受光レンズ43に対向する入射面の平面形状が、投光側ライトガイド32の出射面の平面形状と同じ形状である。
(もっと読む)
物品管理システム
【課題】 店舗や倉庫において、物品の存在位置等の管理を行うことができる物品管理システムを提供すること。
【解決手段】 物品管理システムを、物品を載置する載置部に配置した漏洩伝送路と接続して前記物品に付された無線タグを読み取り無線タグ読取情報を出力する無線タグリーダを有する無線タグ読取手段と、前記載置部に接近する対象物を検出し対象物位置情報を出力する対象物検出手段と、前記無線タグ読取情報と前記対象物位置情報とを関連付けて前記物品の位置情報として出力する物品位置特定手段とを備える構成とする。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、物体が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、反射強度のピークが3つ以上存在する場合、反射強度の高い順に、上位3つのピークを抽出する。これら3つのピークのうち、両端の2つのピークと、これら2つのピーク間の窪みのうち、最低強度に基づいて、前記対象物が車両であるか否かを判定する。また、ピークの強度に対して窪みの強度がある程度落ち込んでいる場合に停止車両であると判定する。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、対象物が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、窪みの強度の所定倍(例えば0.5倍)となる基準強度を算出し、左右端ピークから物体端部(左右端ピークの左脇および右脇)に向かって、この基準強度に相当する走査方向(左側基準方向および右側基準方向)を求め、これらの基準方向間の幅(広がり幅Ws)が車両と判定できる所定幅(例えばWs_max=5.0[m])に収まっている場合、車両らしいとして判定する。
(もっと読む)
1 - 20 / 33
[ Back to top ]