
Fターム[5J084AD03]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 反射光のレベル検出 (111)
Fターム[5J084AD03]に分類される特許
101 - 111 / 111
車両用レーダ装置

【課題】 簡略な回路構成で、複数の受光素子からの受光信号の積算を並列に処理することが可能な車両用レーダ装置を提供すること。
【解決手段】 従来のA/D変換回路、及び積算回路に代わる構成として、PD1〜PD16毎にスイッチSW1〜SW200と、SW1〜SW200の各々に接続されるコンデンサC1〜C200を備えた積分部93を備え、この積分部93において、アナログ的に受光信号を積算する構成を採用している。これにより、従来のように、A/D変換回路(A/D)、及び積算回路を受光素子(PD)毎に設ける必要がなくなり、スイッチSW1〜SW200とコンデンサC1〜C200からなる簡略な回路構成で、複数のPDからの受光信号の積算を並列に処理することが可能となる。
(もっと読む)
車両用レーダ装置

【課題】 小規模な構成で、複数の受光素子からの受光信号の積算を並列に処理することが可能な車両用レーダ装置を提供すること。
【解決手段】 従来のA/D変換回路に代わる構成として、2つの異なる状態を示す比較信号をチャンネル毎に出力するゼロクロスコンパレータ95を備え、また、従来の積算回路に代わる構成として、1ビットのデジタルデータをチャンネル毎に積算する積算部77を備えている。これにより、従来、例えば8ビットのA/D変換回路を用いていた場合、1チャンネル当たり通常8本の信号線が必要であったが、1チャンネル当たり1本の信号線の構成でよい。また、積算部77は、1ビットのデジタルデータを積算するものであるためカウンタで代用できる。従って、小規模な回路構成で、チャンネル毎の受光信号の積算を並列に処理することが可能となる。
(もっと読む)
点滅灯内において一体にまとめられた、光学的な、側方の周辺センサーを有する自動車
【課題】 本発明は、車両の側方の周辺内における対象物を検出するための、少なくとも1つのセンサーを有する自動車であって、その際、
このセンサーが、電磁的な放射線を発信するための少なくとも1つの発信部、並びに、対象物に反射された電磁的な放射線を受信するための1つの受信部を有している様式の上記自動車に関する。
【解決手段】 本発明により、発信部15および受信部20は、側方点滅灯10内において設けられており、この側方点滅灯が、自動車の側壁に装着されており、その際、この発信部15および受信部20が、この側方点滅灯10のカバー50によって覆われている。 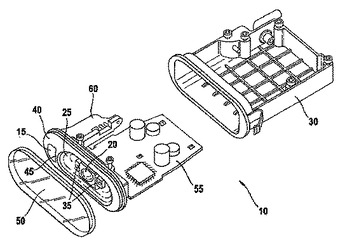 (もっと読む)
(もっと読む)
多次元計測システム
レーザを利用したトラッキングユニットは、ターゲットと通信してターゲットに関する位置情報を取得する。具体的には、ターゲットを計測対象点に配置する。次に、ターゲットのピッチ移動、ヨー移動およびロール移動、ならびにトラッキングユニットを基準としたターゲットの球座標を取得する。例えば、ターゲットは、遠隔制御ロボットなどの可動装置に組み込まれた能動素子であってもよい。 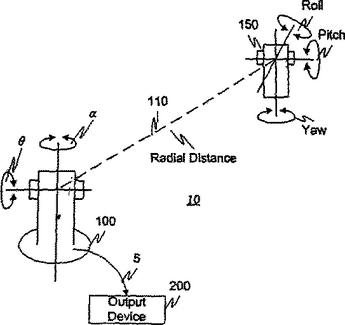 (もっと読む)
(もっと読む)
複数の出力波長を有するレーザレーダ装置
コヒーレントレーザレーダ(ライダ)装置が記載されている。装置は、単一の波長レーザ源を備える送信部と、前記単一の波長レーザ源の出力からの離散波長の少なくとも2つの成分光ビームを含む、組合わされた光ビームを生成するための(電気光学変調器などの)変換手段と、組合わされた光ビームを遠隔ターゲットに送る送信光学装置とを有する。組合わされた光ビームの各成分光ビームは、単一の波長レーザ源から送信光学装置へ同じ光学経路を移動する。装置は、差分吸収測定をするために使用される。  (もっと読む)
(もっと読む)
非接触型検出装置及び制御装置
【課題】 演算の負担が少なく、確実に検出対象の状態を検出することができる非接触型検出装置、及びその検出結果に基づいて好適な制御を行うことができる制御装置を提供すること。
【解決手段】 ステップ100では、高輝度の赤外線を照射する。ステップ110では、PINに受信信号S1が入力したかを判定する。ステップ130では、中程度の輝度の赤外線を照射する。ステップ140では、PINに受信信号S2が入力したか否かを判定する。ステップ160では、低輝度の赤外線を照射する。ステップ170では、PINに受信信号S3が入力したかを判定する。ステップ190では、メモリに記憶した受信信号の状態に応じて制御の内容を設定する。例えば受信信号S1、S2が記憶されている場合には、第2領域に手が進入したとみなしてドームランプ1を点灯し、受信信号S1〜S3が記憶されている場合には、第3領域に手が進入したとみなしてドームランプ1を点灯する制御を実施しない。
(もっと読む)
レーザ測距装置
【課題】ポインティング検出機能を受光系のレベル検知機能に含め、かつ受光量を所定値に調整して受光検出を正確にさせた上、装置の小型化を可能とする。
【解決手段】受光検知器5が、測距する目標物から送られるレーザビームによる受光スポットを受けて受光レベル値を得る検知面を有する。この検知面を制御部8の制御を受ける受光検知器位置調整器9により受光スポットの光軸方向または光軸に垂直な面方向に適切に移動させて配置する。この結果、計測停止信号として検出する受光レベル値を所定値に設定できる。次いで、光軸に垂直な面で検知面を走査することにより、検知面の走査範囲で受光レベル量の変化が得られるので、受光レベル量の位置と相関とからポインティングを推定することができる。すなわち、検知面の変位とその受光量の変化とからポインティング検出と測距の正確性向上を図ることができるので、装置の小型化も実現できる。
(もっと読む)
他車両検出装置及び車間距離制御装置
【課題】先行車両の車両の種類、及びその車両数を判断可能な装置、および先行車両の車種に応じて車間距離の制御を変更可能な装置を提供すること。
【解決手段】先行車両車間検出部8において、反射波が持つ強度パターンに基づき他車両が四輪車であるか二輪車であるかの車両種類を判定する手段を備え、また車間距離制御装置100において、先行車両車間検出部8にて検出した他車両の種類に応じて自車両の先行車両追従モード又は警報を発する車間距離を変更するようにした。
(もっと読む)
3次元画像システムにおける範囲または距離またはレインジ(range)の決定
対象物の画像化のシステムと方法。
検出器アレイの画像が画像面に配設される。検出器の各アレイは内挿部を有しているタイミング回路に接続され内装器はそれが放電する時とは異なった速度で第1のキャパシタを充電する第1の回路を含む。光パルスは対処物の方に送られるので光パルスの一部分は反射パルスとして対象物から反射され光パルスがいつ対象物へ送られたかを示す第1の値が記録される。反射されたパルスは1またはそれ以上の検出器で検出されそのパルスのパルス特性とその反射パルスが検出器にいつ到達したかを表わす第2の値とが記録される。対象物との範囲はその後第1及び第2の値と反射されたパルス特性の関数として計算される。
(もっと読む)
飛翔体追尾方法及び飛翔体追尾装置
【課題】 自機に向かって飛来するミサイルなどの飛翔体を発射後の早い時期に探知し、継続的に追尾することが可能な飛翔体追尾方法及び飛翔体追尾装置を得る。
【解決手段】 紫外線センサを設け、自機に向かって飛来するミサイルなどの飛翔体を、この飛翔体のプルームが発する紫外線を検出することにより、パッシブな手法でかつ早期に初期探知する。また、初期探知した飛翔体の赤外線画像を撮像して飛翔体のテール部を抽出後、このテール部から飛翔体の進行方向にレーザビーム光を照射することによって飛翔体のシーカ搭載位置を捕捉し、これを照準点としてレーザビーム光による飛翔体の追尾を継続する。
(もっと読む)
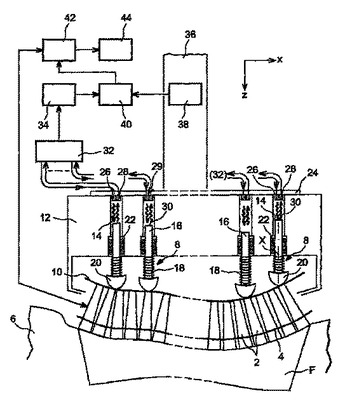
複数の放射エレメント及びエレメントの接触手段を有する接触型超音波トランスデューサ
本発明は、複数の放射エレメント及びこれら放射エレメントの押付け手段を備える接触型超音波トランスデューサに関するものである。本発明のトランスデューサは特に非破壊検査に適している。本発明は、放射エレメント(2)を検査対象物(6)に押付ける手段(8、10)と、前記押付け手段を用いて検査対象物に対する前記エレメントの位置を決定する手段(26、28、34−40)とを有し、これにより、エレメントの励起パルスに適用される遅延規則を確立し、集束超音波ビーム(F)等を形成する。
 (もっと読む)
(もっと読む)
101 - 111 / 111
[ Back to top ]