
Fターム[5J084AD03]の内容
光レーダ方式及びその細部 (24,468) | 測定原理 (1,775) | 反射光のレベル検出 (111)
Fターム[5J084AD03]に分類される特許
61 - 80 / 111
測距装置、測距方法及び測距システム
【課題】パルス光を使用して測距する際に、外光成分を除去できるようにして、測距の精度を向上させる。
【解決手段】測距システム10は、基準時から所定のパルス幅を有するパルス光28を出射する発光手段14と、パルス光28により照射された物体からの反射光34を受光し、基準時からパルス幅に相当する期間にわたる第1区間で蓄積した第1電荷量と、第1区間経過時点からパルス幅に相当する期間にわたる第2区間で蓄積した第2電荷量と、第2区間経過時点からパルス幅に相当する期間にわたる第3区間で蓄積した第3電荷量とを得る受光手段16と、受光手段16で得られた第1電荷量、第2電荷量及び第3電荷量に基づいて、物体までの距離を算出する演算手段18とを有する。
(もっと読む)
光ビーコン

【課題】 アップリンク光を送信した車載機の位置する車線をより確実に認識することができる光ビーコンを提供する。
【解決手段】 本発明の光ビーコンは、アップリンク領域を設定すべく、車載機S1からのアップリンク光UOを受光する受光面7a1を有する投受光器を備えている。この受光面7a1の輪郭形状は、アップリンク領域UAの車線幅方向寸法を略一定にするとともにアップリンク領域UAを車線内に設定する形状とされている。
(もっと読む)
物体検知装置、および照射軸調整方法
【課題】本体の取り付け位置等に関係なく、照射軸調整が同じ位置に設置した、平面を有する調整部材を用いて行える物体検知装置を提供する。
【解決手段】レーダ装置1は、平板20に対してレーザ光を水平方向に走査し、そのときの反射波の強度分布を取得する。そして、反射波の強度が最大であった認識方向を、本体正面に設定する。また、同様に、平板20に対してレーザ光を垂直方向に走査し、そのときの反射波の強度分布を取得する。そして、反射波の強度が最大であった認識方向を、本体正面に設定する。
(もっと読む)
移動体用物体検出装置
【課題】受信信号の時系列フィルタの構造を複雑にしなくても、十分なS/N比を確保しつつ物体の誤検出を防止できる装置を提供する。
【解決手段】物体検出装置は、レーザ光の発光制御とその反射光の受光制御を行うL/R装置3と、L/R装置3の受信信号から物体を検出する物体検出部とを備えている。物体検出部は、走査範囲を所定数に分割した領域毎に受信信号を積算して領域計測データを記憶する積算データ格納メモリ43と、前記領域計測データを領域毎に記憶する領域計測データ格納メモリ44と、前記領域計測データを時系列フィルタリングしてノイズを除去する時系列処理装置45と、を備えている。また、前記物体検知部は、前記時系列処理装置45で処理された領域計測データのピーク値が前回走査の計測時よりも一定値以上減少しているデータについては、物体検知対象から除き、それ以外のデータについて物体検出を行う物体検出器47とを備えている。
(もっと読む)
動作追跡装置および方法
【課題】 本発明は動作追跡装置および方法に関するものであって、入射された映像に基づいてレーザを照射するために映像の入射軸とレーザの照射軸を同期化させ、照射されたレーザを利用して被写体の動作を追跡する動作追跡装置および方法を提供する。
【解決手段】 本発明の実施形態による動作追跡装置は入射された光の一定量は反射させ残りは透過させる半透過鏡と、前記半透過鏡に反射され入射された映像の入力を受ける映像入力部と、前記入力された映像内に含まれた第1被写体の位置を確認する位置確認部および前記確認された位置を参照して前記半透過鏡と前記第1被写体をつなぐ軸上から前記第1被写体に前記半透過鏡を透過するレーザを照射し前記第1被写体を追跡する目標物追跡部を含む。
(もっと読む)
距離画像取得装置及び方法
【課題】外光の影響を除去し、精度良く測距を行う。
【解決手段】対象物に向けて赤外光を照射する発光素子と、前記対象物からの反射光を受光する受光素子と、前記受光素子で受光した受光データに基づいて前記対象物までの距離を演算する距離演算部とを備え、前記受光素子は、波長λ1の赤外光を中心とする第1のバンドパスフィルタと、波長λ1より大きな波長λ2の赤外光を中心とし前記第1のバンドパスフィルタとは光透過領域が重複しない第2のバンドパスフィルタとが、画素毎に所定の配置で配列されたカラーフィルタを有し、前記発光素子は、波長λ2の赤外光を照射し、前記受光素子に前記第1のバンドパスフィルタから入射した第1の受光量と、前記受光素子に前記第2のバンドパスフィルタから入射した第2の受光量とを比較することにより外光の影響を除去して距離画像を取得する。
(もっと読む)
レーダ装置
【課題】一層の検出感度向上を図ることが可能なレーダ装置を提供する。
【解決手段】レーザダイオード12から出力したレーザ光を、凸レンズ23を介して出力する。この凸レンズ23をスキャンアクチュエータ25によりレーザダイオード12に対して揺動させる。これにより、レーザ光の出力方向を変化させることができ、また、走査角度範囲を狭い範囲にすることができる。そして、反射光を受光部50にて逐次受光して、反射光に応じた受光信号を演算部70に出力する。演算部70では、互いに隣接して出力される所定数のレーザ光に対応する所定数の受光信号を積算して積算信号とする。この積算信号に基づいて反射物体を検出する。
(もっと読む)
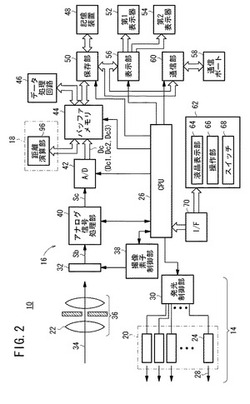
画像撮像装置及び距離測定方法
【課題】光が照射された被写体から得られる出射光を撮影し、被写体の奥行き距離を簡便に測定することのできる画像撮像装置及び距離測定方法を提供する。
【解決手段】第1の波長を有し、光軸と垂直な面において第1の強度分布を有する第1の照射光と、第1の波長とは異なる第2及び第3の波長を有し、光軸と垂直な面において第1の強度分布とは異なる第2の強度分布を有する第2の照射光とを、同時に被写体に照射する照射部と、被写体から得られる出射光から、第1の波長を有する第1の出射光と、第2の波長を有する第2の出射光と、第3の波長を有する第3の出射光とを光学的に分離する分光部と、それぞれの強度を撮像及び検出する撮像部及び光強度検出部と、第1、第2及び第3の出射光の強度に基づいて被写体までの奥行き距離を算出する奥行き距離算出部とを備えた。これにより、被写体の奥行き距離を簡便に測定することができる。
(もっと読む)
光電センサ、板状部材検出装置及び光電センサ用反射部材
【課題】被検出体の位置の検出精度の高い光電センサ、板状部材検出装置及び光電センサ用反射部材を提供する。
【解決手段】センサ本体とこのセンサ本体に対向配置される反射部材6とを備えた光電センサにおいて、反射部材6の反射面15aの有効領域A1を変更可能とするブラケット12及び遮光板13を設けた。
(もっと読む)
赤外線放射検出器及び該検出器を備えた運転又は操縦支援装置
【課題】本発明の目的は、視野の端部では素早い検出及び視野の中央では感度の良い検出を可能にする赤外線放射検出器に提供することである。
【解決手段】この検出器は、赤外線を検出することが可能な単位センサーのアセンブリを備えている。このアセンブリは、少なくとも2つの分離された検出領域を備え、第1検出領域が第1熱時定数を有している単位センサーを備え、第2検出領域(46−49)が前記第1熱時定数よりも小さい第2熱時定数を有している単位センサーを備えている。
(もっと読む)
差分吸収ライダ装置
【課題】移動しながらの計測によりドップラー周波数シフトが生じる時でも受信光を検出できる差分吸収ライダ装置を得る。
【解決手段】第1及び第2のCW送信光信号、CWローカル光信号を発生する光信号発生手段1〜3と、第2のCW送信光信号に第1の周波数シフト、第1のCW送信光信号に第2の周波数シフトを与える周波数シフト手段4a、4b、5aと、2波長の光信号を空間中に放射する放射手段6〜9と、ターゲットからの散乱光を受信光として受信する光受信手段9、10と、送信ビームのターゲット上の照射スポットが受信視野内に入るように光受信手段を逐次制御するビーム照射スポットトレーサー11と、第1、第2のCWローカル光信号と受信光とをヘテロダイン検波して電気信号に変換し、第2、第1の周波数シフト成分を抽出してそれらの強度の差異からターゲットの濃度を検出する濃度検出手段5b、5c、12、13とを設けた。
(もっと読む)
自動ドア用反射型センサ
【課題】自動ドア近傍の床面にドアウェイの部分を含めてスポット光をマトリクス状に照射してドアの移動方向と平行な複数の監視列を設定し、その監視列の一つをドアウェイ上に配置してドアウェイ監視列とする自動ドア用反射型センサにおいて、ドアウェイ監視列の調整時に通常監視列がドアウェイに接近しすぎないようにする。
【解決手段】ドアウェイ監視列WL1をドアウェイDWの部分に設定する際に用いられる調整モードと、ドアウェイ監視列WL1および通常監視列WL2〜WL4を含めてすべての監視列を有効とする運用モードとを備え、調整モード時には、ドアウェイ監視列WL1に直近として隣接する通常監視列WL2のみを有効とする。
(もっと読む)
車載用レーダ装置
【課題】走行中に、道路状況(直線、曲線、水平、傾斜)の如何に関わらず、スキャン正面軸のずれ角を短時間に検出する車載用レーダ装置を提供する。
【解決手段】車両用測距装置は、レーザ光を2次元スキャンするスキャナ13と、制御回路11とを備えている。制御回路11は、スキャン13より得られるデータから、先行車との距離、先行車の方向を検出する。また、制御回路11は、ヨーレート、ピッチング、車速の情報から、先行車を検出した時点の自車の存在位置からの移動変化を検出し、現時点の自車の位置を検出する。この自車の位置が、最初に先行車を検出した位置に最も近づいた時、この自車の位置と最初に検出した先行車の位置とに基づいて、光軸のずれ角を検出する。
(もっと読む)
光学式反射型センサ用受光回路
【課題】本発明は、光学式反射型センサの小型化、低消費電力化及び低コスト化を可能にする光学式反射型センサ用受光回路を提供することにある。
【解決手段】FET1のドレイン(D)を直流電源(図示せず)の+側(Vcc)に接続し、ソース(S)を受光素子2のカソードに接続し、受光素子2のアノードを直流電源の−側(GND)に接続する。そして、FET1のソース(S)と受光素子2のカソードとの接続部を容量素子3の一方の電極とヒステリシス特性を有するインバータ4の入力端子に接続し、容量素子3の他方の電極をGNDに接続し、インバータ4の出力端子は外部に対する出力信号の供給端子となっている。
(もっと読む)
測距装置
【課題】 距離が異なる複数の目標物からの反射光が存在するときには、その距離差によらずエラーと判定すること。
【解決手段】 信号発生回路12の変調信号を周波数制御回路18で掃引し、掃引された変調信号で変調された測距光をレーザダイオード16から目標物に向けて出射し、目標物からの反射光を受光ダイオード20で受光して測距信号に変換し、この測距信号を周波数変換回路24で中間周波の測距信号に変換し、この測距信号を基にCPU44で目標物までの距離を求めるに際して、測距信号を検波回路30で検波し、この検波出力の最大値と最小値との差をCPU40で求め、この差が設定値よりも大きいときには、距離が異なる複数の目標物からの反射光が存在するとして、エラーを表示器34に表示する。
(もっと読む)
測距装置
【課題】対象物までの距離を精度良く測定することを課題とする。
【解決手段】測距装置10は、方向調節機構12Lおよび方向調節機構12Rを通じて照射方向を調節しつつ、照射器11Lおよび照射器11Rから近赤外線光を照射し、照射器11Lおよび照射器11Rによって照射された第1の送出波および第2の送出波の反射波の輝度値が閾値以上である場合に照射線の交点で物体と接触したと判別し、その照射交点接触時の第1の送出波および第2の送出波の照射角度を検出し、該検出した第1の送出波および第2の送出波の照射角度に基づいて、当該照射線の交点までの距離を算出する。
(もっと読む)
バーコード・スキャナによる移動するアイテムの方向を追跡するための方法および装置
【課題】レーザ・バーコード・スキャナによる移動するアイテムの方向を追跡するための方法、コンピュータ読み取り可能媒体および装置を提供する。
【解決手段】一対の走査面による移動するアイテムの包装グラフィックスから反射するビデオ遷移を感知するステップと、一対の走査面の各走査面が感知したビデオ遷移の数をカウントするステップと、一対の走査面の各走査面のビデオ遷移のカウントした数を、第1のサンプルのところの所定の閾値と比較することにより、移動するアイテムが各走査面と交差したかどうかを判定するステップとを含む。時間的に第2のサンプルのところで、上記ステップが反復され、この方法は、第1のサンプルおよび第2のサンプルから観察した変化から移動するアイテムの移動方向を評価する追加ステップを含む。
(もっと読む)
検出センサ
【課題】比較的簡単な構成で、移動する物体を測定することが可能な検出センサを提供することを目的とする。
【解決手段】光電センサ30は、投光部31、受光部33、データ処理部40、出力回路51、出力回路制御部55などから構成され、移動するワークWに向けて、投光・受光動作を行なって、ワークWの位置を検出する。受光部33から出力される受光信号Cnはデータ処理部40に入力される。データ処理部40は第一データ処理部45、第二データ処理部47などから構成される。ワークが測定エリアになく測定が正しく行なわれていない場合には、受光信号Cnの変化が大きく現れるが、この変化を、第二データ処理部47で監視することで、ワークWが測定エリアから外れている場合には、出力回路51の出力動作を停止させる。これにより、ワークWが測定エリアから外れた状態で測定された測定結果が、外部に出力されることがない。
(もっと読む)
物体検出装置
【課題】物体の個体識別を簡素化するとともに高速化することができる物体検出装置を提供する。
【解決手段】レーザレーダ装置7は、検知領域内の物体を検知して(S101)、反射光量データを得るとともに(S103)、自車101から物体までの距離および方位を取得する(S103)。レーダ装置7は、取得した反射光量データに基づき、検知物体を高反射体または低反射体に属性判別する(S104)。CCDカメラ4は検知領域を撮像し(S105)、画像データ生成部5は画像データを生成する(S106)。画像処理部6は、レーダ装置7で得られた物体検知情報と属性情報とから画像データ上でのマッチング処理領域を設定して、それぞれの属性に応じたサンプリングパターンでパターンマッチングを行う。画像処理部6は、このマッチング結果に基づいて物体の個体識別を行う(S107)。
(もっと読む)
レーザ地形観測システム
【課題】地形変化の観測精度を維持する。
【解決手段】反射率監視部4が反射部2の反射率を測定する。このような構成によれば、反射率監視部4によって反射部2の経時劣化や落下・消失を検出することができるので、地形変化の観測精度を維持することができる。また、反射率監視部4は反射部2の性能を直接測定するので、少ない誤差で反射部2の性能を測定することができる。
(もっと読む)
61 - 80 / 111
[ Back to top ]