
Fターム[5J084BA49]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754) | 1次元走査を行うもの (148)
Fターム[5J084BA49]に分類される特許
61 - 80 / 148
レーザスキャンセンサ
【課題】遠方の人体を確実に検知するとともに、測定方向によって測定距離範囲が比較的近いところに限定される場合などにはカバーが汚れているとの不用意な警告を抑止し、カバー全体で汚れ方にむらがある場合などにも適切な警告を行うことが可能なレーザスキャンセンサを提供する。
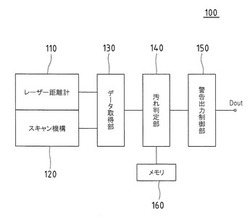
【解決手段】レーザスキャンセンサ100は、レーザ距離計110と、スキャン機構120と、データ取得部130と、汚れ判定部140と、警告出力制御部150と、メモリ160とを備えている。レーザ距離計110は開口部を有する筐体101の内部に配置されており、その開口部はレーザ光が透過可能なレンズカバー116で覆われている。汚れ判定部140において受光レベルとの大小比較を行う所定閾値を、測定方向毎の最大検知距離情報に基づいて変更する。
(もっと読む)
動線認識システム

【課題】監視領域が広い対象に対して有効な動線認識システムを提供する。
【解決手段】監視領域内における移動体の位置検出をマルチレーザスキャナ方式で行う。そして、このマルチレーザスキャナ方式により検出された移動体の位置を示す位置情報を、当該位置に移動体が居た時刻を示す時刻情報とともに監視領域移動体情報としてレーザ動線データベース27に記録する。一方、監視領域内の一部である特定領域内における移動体の位置を、マルチレーザスキャナ方式よりも位置検出の精度が高いカメラ画像方式で行う。そして、このカメラ画像方式により検出された移動体の位置を示す位置情報を、当該位置に移動体が居た時刻を示す時刻情報とともに特定領域移動体情報としてカメラ動線データベース28に記録する。
(もっと読む)
物体を光学的に走査および測定する方法
レーザスキャナ10を用いて物体Oを光学的に走査および測定する方法Oは、標的周波数ω0で変調された発光ビーム18が、発光器17を用いて放射され、レーザスキャナ10の周辺部で物体Oから何らかの形で反射され、または他の形で散乱された受光ビーム20が、受光器21を用いて、多数のサンプルとして測定クロックfMとともに受け取られ、それぞれの場合、少なくとも物体Oからの距離dが、制御および評価デバイス22を用いて、複数の測定点Xに対する多数のサンプルの位相角Φから判定され、距離dを判定するために、時間的に隣接するサンプルの距離差Δdによって生じる位相シフトΔΦを補正して距離dを補正するという手順によって行われる。  (もっと読む)
(もっと読む)
周囲を光学的に走査および測定する装置
レーザスキャナ10として設計される、周囲を光学的に走査および測定する装置であって、走査に対してレーザスキャナ10の静止基準系を規定する中心C10およびこの走査の中心Ciと、発光ビーム18を放射する発光器17と、レーザスキャナ10の周囲の空間内で物体Oによって反射され、または他の形で散乱された受光ビーム20を受け取る受光器21と、走査の多数の測定点Xに対して、少なくとも中心Ciと物体Oの間の距離dを判定する制御および評価ユニット22とを有し、異なる中心C1、C2、...を有するいくつかの走査で周辺空間を測定するレーザスキャナ10が、中心C1、C2、...間を全体として動くことができるデバイスにおいて、異なる中心C1、C2、...間で全体としてレーザスキャナがたどる経路を位置合わせする光学デバイスとして、スキャナマウス30が提供され、スキャナマウス30は、レーザスキャナ10に配置され、基準表面Gに対するレーザスキャナ全体の動きを光学的に測定する。  (もっと読む)
(もっと読む)
光学式変位計
【課題】正確な計測結果を得ることが可能な光学式変位計を提供する。
【解決手段】時点t21,t22,t23において、X方向における光の走査位置が位置P12に一致し、時点t21a〜t21bの期間、時点t22a〜t22bの期間、時点t23a〜t23bの期間に露光が行われる。この場合、露光の開始時点と終了時点との中間の時点で、投光方向が所定の方向と一致する。すなわち、時点t21a〜t21の期間の長さと時点t21〜t21bの期間の長さとが等しく調整され、時点t22a〜t22の期間の長さと時点t22〜t22bの期間の長さとが等しく調整され、時点t23a〜t23の期間の長さと時点t23〜t23bの期間の長さとが等しく調整される。
(もっと読む)
レーザレンジセンサのタイムスタンプ機能付加装置
【課題】本発明は、光を走査させ、その反射光を検出することにより、走査範囲にある測定対象物までの距離を測定するレーザレンジセンサにタイムスタンプ機能を付加するタイムスタンプ機能付加装置に関し、レーザレンジセンサに高精度のタイムスタンプ機能を容易に追加することができるレーザレンジセンサのタイムスタンプ機能付加装置を提供することを目的とする。
【解決手段】光を走査させ、その反射光を検出することにより、走査範囲にある測定対象物までの距離を測定するレーザレンジセンサで測定された測定データにタイムスタンプ情報を付加するタイムスタンプ情報機能装置であって、レーザレンジセンサに取り付けられ、レーザレンジセンサから出射される光を検出し、検出信号を出力する検出部と、レーザレンジセンサに取り付けられ、検出部から出力された検出信号に基づいてレーザレンジセンサにタイムスタンプ機能を追加するアタッチメント本体とを含む構成とされている。
(もっと読む)
物体検知装置
【課題】被検知物の存在、方向、または距離だけでなく、形状や大きさをも検知することができる超小型物体検知装置を提供する。
【解決手段】物体検知装置1は、発光素子3と、これから照射された光を線状光に変換する回折光学素子4とを回転させる回転駆動手段と、前記線状光をその線方向と直交する方向に走査することによって形成される検知領域にある被検知物から反射された反射光を受けて反射光のパターンを生成する撮像素子5と、前記撮像素子により生成された前記反射光のパターンから前記被検知物の存在、その方向、形状又は大きさを検知する検知回路6とを備える。
(もっと読む)
レーザレーダ装置
【課題】装置の大型化を招くことなく検出物体までの測定距離の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】光ファイバ74により、レーザ光L0の光軸上に光導入部75が存在する場合に、このレーザ光L0の一部が導光されてフォトダイオード20に出射する。また、レーザダイオード10でのレーザ光L0の発生からこのレーザ光L0の一部が光ファイバ74により導光されてフォトダイオード20により検出されるまで導光時間Tと導光方向距離Xfとに応じて距離補正値Xcが算出される。そして、測定距離Xが距離補正値Xcに基づいて補正される。
(もっと読む)
レーザ距離測定装置
【課題】物体までの距離を検出可能なレーザ距離測定装置において、計測回路のばらつきに起因する誤差を効果的に排除することができ、物体までの距離をより精度高く計測しうる構成を提供する。
【解決手段】レーザ距離測定装置1には、光分離部80が設けられ、偏向部41が所定回動位置にあるときに、この偏向部41からのパルスレーザ光L1を、経路長が異なる第1の経路と第2の経路とに分離している。更に、当該所定回動位置において、パルスレーサ光L1の投光から第1の経路を通る第1光が検出されるまでの第1時間T1と、前記投光から第2の経路を通る第2光が検出されるまでの第2時間T2とを検出しており、これら第1時間T1及び第2時間T2に基づき、物体検出の際の距離算出に用いる補正データを生成している。
(もっと読む)
レーザ距離測定装置
【課題】レーザ距離測定装置において、正確な距離補正を行い得る構成を、装置構成の大型化、検出性能の低下を招くことなく実現する。
【解決手段】レーザ距離測定装置1には拡散反射部材80が設けられ、偏向部41が第1回動位置にあるときに、レーザ光の投射から第1拡散反射光がフォトダイオード20によって検出されるまでの時間(第1時間T1)を検出し、偏向部41第2回動位置にあるときにも、レーザ光の投射から第2拡散反射光が検出されるまでの時間(第2時間T2)を検出している。そして、それら第1時間T1及び第2時間T2に基づいて距離算出に用いる補正データを生成している。更に、第1回動位置のときにレーザ光が拡散反射面に入射するときの第1入射角θ1と、第2回動位置のときにレーザ光が拡散反射面に入射するときの第2入射角θ2とが異なるように構成されている。
(もっと読む)
海上監視・捜索方法
【課題】捜索海面における海域の状況を迅速に把握し、対象物を効率良く監視又は捜索することができる海上監視・捜索方法を提供する。
【解決手段】高速で飛行する航空機(固定翼、回転翼)21に搭載したレーザレーダ22から対象物11が存在すると思われる捜索海域10に対して、所定の比率の矩形状のレーザ光23を照射し、捜索海域10における一回に取得する撮像領域(レーザ照射エリア)24の撮像情報を取得し、この撮像上方から捜索海域10の波の情報を取得し、前記取得した捜索海域10の波の情報から、前記レーザレーダの捜索俯角(θ)を決定し、対象物11を捜索する。
(もっと読む)
レーザレーダ装置
【課題】分光効率が良く、検出性能に優れたレーザレーダ装置において、誤検出を効果的に防止しうる構成を提供する。
【解決手段】レーザレーダ装置1にはミラー30が設けられている。このミラー30の反射面30aは、レーザ光L0の光軸に対し所定角度で傾斜しており、ミラー30内には反射面30aと交差する方向に延びる貫通路32が形成されている。レーザレーダ装置1は、レーザダイオード10からのレーザ光L0を上記貫通路32を介して通過させ、他方、検出物体からの反射光L3については、反射面30aによりフォトダイオード20に向けて反射する構成をなしている。更に、レーザダイオオード10と貫通路32との間に、レーザ光L0が貫通路32にて反射して反射面30a側に漏洩することを防ぐ導光部材70が設けられている。
(もっと読む)
六自由度計測装置及び方法
六自由度計測用のレーザ追尾システムとして、第1レーザビームを輻射する主光学アセンブリ、第2レーザビームを二次元パターンへと整形して輻射するパターン投射アセンブリ、並びに標的を備え、その標的が再帰反射器及び位置検出アセンブリを有し、その再帰反射器の対称中心が位置検出アセンブリの存在平面とは異なる平面上にあるものを提案する。標的の向きを計測する方法として、二次元パターンを呈するようレーザビームをその標的に入射させるステップと、位置検出アセンブリ上における二次元パターンの位置を調べそのパターンの実測シグネチャ値を求めるステップと、得られた実測シグネチャ値に基づき標的の向きを算出するステップと、を有する方法を提案する。  (もっと読む)
(もっと読む)
距離計測装置及びプログラム
【課題】対象物の3次元位置を精度よく計測することができるようにする。
【解決手段】第1撮像部20及び第2撮像部22によって、撮像対象物を各々異なる位置から撮像して、複数の撮像画像データを出力し、3次元距離算出部24によって、出力された複数の撮像画像データに基づいて、撮像対象物を表わす領域内の各画素に対応する3次元位置までの距離を算出して距離画像を生成する。レーザレーダ14によって、レーザの走査方向に並んだ各2次元位置までの距離を計測する。座標変換部32によって、レーザレーダ14によって距離が計測された2次元位置を、距離画像の画素座標に変換する。補正領域抽出部34によって、変換された画素座標に基づいて、位置距離画像から補正対象領域を抽出し、3次元距離補正部36によって、補正対象領域内の各画素に対応する3次元位置までの距離を、レーザレーダ14によって計測された距離に補正する。
(もっと読む)
位置検出装置
【課題】投光側反射手段の回転位置を検出する構成を、より小型に、且つ簡易なものとすることができ、装置全体の小型化、軽量化を効果的に図りうる位置検出装置を提供する。
【解決手段】位置検出手段1は、回転可能なビームスプリッタ50により、光源2からの検出光L1の少なくとも一部を空間に向けて投射すると共に、検出物体からの反射光を、凹面鏡20及びフォトダイオード25を用いて検出している。さらに、フォトダイオード25とは異なる位置に受光センサ10が設けられており、ビームスプリッタ50が所定の回転位置となったときには、ビームスプリッタ50に入射した検出光の少なくとも一部が導光手段によって導かれ、受光センサ10に受光される。そして、この受光センサ10による検出結果に基づいて、ビームスプリッタ50の回転位置が検出される。
(もっと読む)
路面監視装置,サスペンション制御装置
【課題】車両の姿勢に関わらず路面状況を正確に検出可能な監視装置、及びその監視結果を利用するサスペンション制御装置を提供する。
【解決手段】レーザー光で路面をスキャンした測定結果から、レーザー光を反射した地点をセンサ座標で表した検出位置情報(XL,YL,ZL)を生成し、各種センサの検出結果から車両の移動距離D,路面傾斜角θx,θyを算出する(S110〜S140)。これら算出結果から、車両の移動距離,移動方向を表す移動ベクトル(ΔX,ΔY,ΔZ)を求めると共に、検出位置情報を、車両基準座標の原点からの相対的な位置関係を示す相対位置ベクトル(XP,YP,ZP)に変換し、これら移動ベクトル及び相対位置ベクトルを、前回の監視タイミングにおける車両基準座標系の原点を絶対座標系で表した位置(Xr,Yr,Zr)に加算することで、レーザー光の反射地点の位置を絶対座標系で示した反射地点情報(X,Y,Z)を算出する(S150〜S170)。
(もっと読む)
車両の障害物警報装置
【課題】 ドライバーが前方横断物に対して自車両を安全に運転するために有益な障害物情報を状況に合致した的確なかたちでドライバーに提供することを課題とする。
【解決手段】 レーザレーダ11で検出した車両前方に存在する障害物の移動方向を検出し、その検出結果に基づいて自車の進行方向の前方を横切る動きをすると判断した障害物を、ディスプレイ13に視覚的に表示する電子制御ユニット10を備える。
(もっと読む)
障害物検出装置
【課題】移動体にピッチ角変化が生じても、障害物検知の範囲が適切に確保できる障害物検出を提供する。
【解決手段】車両1の走行方向X前方に向けて電磁波を照射すると共にその電磁波によるスキャン範囲を上下方向に設定した照射手段を、車幅方向左右に離して2つ設ける。その2つの照射手段からの照射方向2Gを、上記走行方向X前方で交差するように設定する。そして、照射した電磁波の障害物からの反射波に基づき障害物を検出する。
(もっと読む)
光走査型光電スイッチ
【課題】小型化と共に、取り付け位置の制約を改善し得る光走査型光電スイッチを提供する。
【解決手段】外部へ信号生成手段で生成された信号を出力すると共に電源ラインを含む第1コネクタ5を備え、第1コネクタ5に接続される第2コネクタ付のケーブルの第2コネクタを受け入れ可能な凹所15が筐体1に形成され、第2コネクタ付のケーブルのケーブル部分を受け入れ可能な第1および第2溝61,62が筐体1に形成され、凹所15および各溝は第2面E2から軸線方向Zに向って後退しており、凹所15および第1溝61は光学素子の配列に沿った外縁Eeから筐体1の内方に向って後退しており、第2溝62は第1面E1から筐体1の内方に向って後退しており、凹所15が第1溝61を介して第2溝62に連なっていることを特徴とする。
(もっと読む)
光走査型光電スイッチ
【課題】保護領域の設定等、光走査型光電スイッチの種々の設定が簡便に行える光走査型光電スイッチを提供する。
【解決手段】接続される機器の動作許可/動作不許可を示す安全信号を出力する光走査型光電スイッチに関する。光走査型光電スイッチの安全機能の状態および故障状態の情報の内の少なくとも1つの情報を表示する表示画面を有する表示部38aと、前記表示部38aの近傍に設けられ、表示部38aの表示内容を安全信号、判別結果、光走査型光電スイッチの設定内容、光走査型光電スイッチの安全機能の状態および故障状態の情報の内の1つの情報から他の前記情報に変更するための操作部39とを備えている。
(もっと読む)
61 - 80 / 148
[ Back to top ]