
Fターム[5J084BA49]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754) | 1次元走査を行うもの (148)
Fターム[5J084BA49]に分類される特許
81 - 100 / 148
検出装置

【課題】簡素で、外乱を受けにくく、可能な限り長寿命を確保できる構造を採用し、広い角度範囲(最大360度まで)に渡って監視領域の物体を確実に検出できる検出装置を提供する。
【解決手段】監視領域11の物体を位置分解的に検出する検出装置は、送信領域19に電磁波を出射する送信装置15と、受信領域23から反射された電磁波を受信する受信装置21とを備え、前記送信領域19及び受信領域23は前記監視領域11において一定の検出角度をカバーする検出領域27の内部で互いに重畳又は交差し、該検出領域27で出射波17が前記物体により反射され、更に、前記出射波17の伝播経路及び/又は反射波25の伝播経路に設置され、どの時点においても前記検出領域27全体を送信側及び/又は受信側でカバーする結像系29と、前記反射波25をその反射位置に関して識別するための位置分解手段31とを備える。
(もっと読む)
効率が向上した測地スキャナ
【課題】本発明は、ターゲットの外観を決定する方法および測地スキャナを提供する。
【解決手続】本発明の方法および測地スキャナでは、初期スキャンが行われ、ターゲット(150)の表面における、多数の予め定めた位置(151〜166)のそれぞれについて、最適なゲイン値の組を算出または決定する。すべての予め定めた位置についてのゲイン値(g151〜g166)が決定されると、ゲイン値を用いて予め定めた位置のそれぞれとの距離が算出される。本発明は、測定速度および全体の効率が向上する点で、好都合である。  (もっと読む)
(もっと読む)
移動物体検出装置

【課題】移動物体を高精度に検出する移動物体検出装置を提供することを課題とする。
【解決手段】道路上の移動物体を検出する移動物体検出装置1であって、移動物体の位置を検出する移動物体検出手段10,31と、道路上での移動物体の移動範囲を限定する移動範囲限定手段41と、移動範囲限定手段41によって限定された移動範囲内において、移動物体検出手段10,31によって所定時間間隔でそれぞれ検出された各位置についての対応付けを行う対応付け手段51とを備えることを特徴とする。
(もっと読む)
対物距離計測方法及び装置
本発明に係る方法は、計測対象物(20)までの距離(d)を計測する方法であり、発光器(12)からビーム光(18)を出射するステップと、計測対象物(20)で反射されたビーム光(24)を受光器(14)に入射するステップと、その出射(18)から入射(24)までのビーム光伝搬時間から距離(d)を求めるステップと、ビーム光(18)の出射に際し方形波変調信号(66,74)に従いそのビーム光(18)を振幅変調するステップと、を有する。使用する方形波変調信号(66,74)は、それぞれ複数個の方形パルス(68,68’)からなる複数個の方形パルス群(76,76’)を含む信号(66,74)である特に、本方法では、それら方形パルス群(76,76’)間の時間間隔(PA)を変動させると共に、それらの方形パルス群(76,76’)内の方形パルス(68,68’)の個数を変動させる。 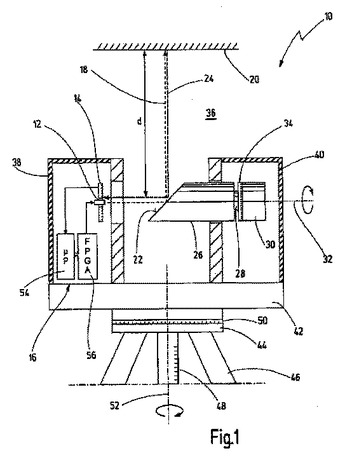 (もっと読む)
(もっと読む)
対物距離計測装置
本発明に係る装置は計測対象物(20)までの距離(d)を計測する装置であり、出射ビーム光(18)を発生させる発光器(12)、計測対象物(20)による出射ビーム光(18)の反射で生じる入射ビーム光(24)を受け取る受光器(14)、並びにそれらのビーム光(18,24)の伝搬時間に基づき距離(d)を求める評価ユニット(16)を備える。受光器(14)は、第1レンズ素子(60)及びピンホールダイアフラム(64)を有する受光ユニット(58)を備える。入射ビーム光(24)が光輪(102)状になってピンホールダイアフラム(64)に達するよう、非透光性の部材(12)で受光ユニット(58)の中央部に影を作る。第1レンズ素子(60)とピンホールダイアフラム(64)の間に、略鍔付帽子状断面の第2レンズ素子(62)を配置する。  (もっと読む)
(もっと読む)
3次元形状測定器
【課題】レーザ光の照射位置における戻り光の正確な光量による計測が可能な形状測定装置を有する3次元形状測定器を提供すること。
【解決手段】レーザダイオード2と、第1光学系と、照射位置移動手段と、エンコーダ6aと、第2光学系と、CCDラインセンサ部13と、入射光量測定手段とを有し、検知手段から出力された検知信号により所定時間の間隔を有する複数のタイミング信号が生成され、タイミング信号によってCCDのリセットタイミングが制御されており、一のタイミング信号後に確認用レーザ光をレーザダイオード2から照射し、確認用レーザ光の光量を入射光量測定手段により測定し、入射光量測定手段により測定された確認用レーザ光の光量から測定用レーザ光の発光量が決定される。
(もっと読む)
距離測定装置及びプロジェクタ
【課題】 正確な距離測定が可能であって測定可能な距離の範囲が広く、又機構の調整を容易に行える距離測定装置と、該距離測定装置を備えたプロジェクタを提供する。
【解決手段】 プロジェクタは、光源装置と、当該光源装置からの光を表示素子に導光する光源側光学系と、表示素子と、該表示素子から射出された画像をスクリーンに投影する投影側光学系と、距離測定装置1とを備え、光源装置や表示素子を制御するプロジェクタ制御手段を有しているものである。そして、この距離測定装置1は、レーザー光を測距対象に照射するレーザー発光器2と、測距対象からの反射光を集光する受光レンズ4と、この受光レンズ4を透過した測距対象からの反射光を受光する受光素子3と、を有し、レーザー発光器2からの射出レーザー光の光軸位置に受光レンズ4の受光領域を位置させているものである。
(もっと読む)
物体検出装置
【課題】特定の範囲に存在している物体の位置検出精度を向上させる。
【解決手段】検出対象の物体が比較的遠距離に存在している車両の前方領域と、検出対象の物体が比較的近距離に存在している車両の側方領域を含む物体検出範囲内で、長手方向を鉛直方向に略一致させたスリットのレーザ光を走査させ、物体で反射されたレーザ光を、受光面20Aのうち、前方領域からのレーザ光の受光範囲におけるレーザ光移動方向に直交する方向に沿った受光素子24の配列のピッチが、側方領域からのレーザ光の受光範囲におけるレーザ光移動方向に直交する方向に沿った受光素子24の配列のピッチよりも小さくされた受光器で受光し、レーザ光を反射した物体の鉛直方向位置を検出することで、比較的遠距離に位置し前方領域内に存在している物体の鉛直方向位置の検出精度を向上させる。
(もっと読む)
光方向性結合器及びそれを用いた光レーダ装置
【課題】 安価で調整不要(したがって振動にも強い)な光方向性結合器を提供する。
【解決手段】 一端面を光の入出射面(13)とすると共に他端面を光の出射面(14)とする透明素材からなる柱状部(11)の側面に、これも透明素材からなる枝状部(12)を所定の角度で斜めに突出させ、且つ、その枝状部の端面を光の入射面(15)として構成された光方向性結合器(10)であって、前記柱状部の各側面のうち、前記枝状部の突出面の対向面が、前記入射面に加えられた光の導光面(16)として作用するように、前記枝状部の突出角度(所定の角度)を設定する。
(もっと読む)
移動体の障害物位置認識方法及び移動体
【課題】小型で低コストの一次元レーザスキャナを用いて、移動体の移動方向とは異なる二次元方向に測定光を走査させ、障害物を位置認識できるようにすること。
【解決手段】移動面A上を移動する移動ロボット1の本体3と移動用走行輪5とを接続する走行輪アーム7のアーム部71,73を、ロータリアクチュエータ75の回転により適宜個別に屈伸させ、本体3をチルト方向に揺動させて、移動面A上の障害物を認識するため外界センサ13が出力する、移動ロボット1の左右方向に走査される測定光を、上下方向にも走査させる。本体3をチルト方向下方に揺動させ外界センサ13で受光した移動面Aからの反射光から割り出した、移動面Aの座標値群のローカル座標系における鉛直座標軸の方向と、加速度センサ153の出力から割り出した重力方向とのずれ角で、ローカル座標系からグローバル座標系への座標値変換用のキャリブレーションデータを得る。
(もっと読む)
距離計測装置、距離計測方法および車両
【課題】背景光の周波数が変化しても、被検物までの距離を正確に計測できる距離計測装置を提供する。
【解決手段】所定周波数で変調された光を照射する投光装置1と、照射された光の反射光を撮像する撮像装置2と、撮像装置2で得られた撮像信号の同期検波を行う同期検波処理部32と、同期検波によって得られた信号に基づいて被検物までの距離情報を求める距離算出部33と、撮像装置2で得られる撮像信号に基づいて、この撮像信号に含まれる周波数成分と識別可能な照射光の周波数を求める照射周波数算出部34と、その照射光の周波数によって投光装置1の所定周波数を変更する駆動制御部31とを備える。
(もっと読む)
侵入物に対してゲートの閉じる面を安全に保つために、垂直又は水平に移動するゲートを制御する方法
駆動装置により移動するドアーを制御する装置であって、ドアーは、長方形のゲート開口部を開位置から閉位置に移動するようになっており、ドアーが閉位置に移動している場合、侵入物が入ってくることを検出できるようになっていて、距離測定検出器のビームがドアーの移動面を90°の検出範囲で横切るようになっており、距離測定検出器のビームは、所定のスキャン段階において、ゲート先端部に当たり、続いてドアーの側面のガイド部材に当たるようになっていて、そしてその距離測定限界値はゲート先端部において特性値と一致し、側面のガイド部材において一つの特性曲線に一致しており、そしてその距離測定限界値がそれぞれの距離測定検出器と比較され、距離測定検出器が所定の許容範囲内で距離測定限界値より小さい場合には、衝突が検出されたことになる。  (もっと読む)
(もっと読む)
走査式測距装置
【課題】小型化を可能としながらも、光学窓が遮光シート等で覆われたことが容易に検出できる安価な走査式測距装置を提供する。
【解決手段】投光部3から出力された測定光を測定対象空間に向けて偏向する第一偏向部材9aと、測定対象空間に存在する測定対象物Rからの反射光を集光する受光レンズ9cと、受光レンズを透過した反射光を投光部3と対向配置された受光部5に向けて偏向する第二偏向部材9bとを備えた光学系9と、光学系9を所定の軸心P周りに回転させる走査機構4を備え、受光部5で検出された反射光に基づいて測定対象物Rまでの距離を測定する走査式測距装置であって、第一偏向部材9aによって偏向された測定光を、第二偏向部材9bへの反射光の入射光路Lc内から出力する光学部材90を備えている。
(もっと読む)
距離計測方法および装置、ならびに距離計測装置を備えた車両
【課題】計測対象空間内の被検物の距離情報、例えばその被検物が計測装置からある特定の距離だけ離れているかどうかを高速に計測する。
【解決手段】投光器1L,1Rは、計測対象空間内に照射光L11〜L13およびL21〜L23を交差するように、かつそれらの交点からの反射光のパルス間隔が交点までの距離に対応する時間間隔となるようにパルス光を投光する。撮像素子2は、計測対象空間内の被検物からの反射光を検出してその被検物の像を複数回撮像する。同期検波部33Aは、複数枚の画像における各画素から出力される時系列画素信号の中から、計測対象である交点までの距離に対応するパルス間隔を持つ時系列画素信号を検出する。
(もっと読む)
物体検知装置
【課題】小型かつ安全な物体検知装置を提供する。
【解決手段】物体検知装置1は、光を被検知領域に照射する発光素子2と、被検知領域にある被検知物Wから反射された反射光を受光する受光素子3と、受光素子3を回転させる回転駆動手段4と、受光素3子により受光された反射光の強度を検知する検知手段5とを備える。回転駆動手段4は、少なくとも一対の圧電ユニモルフ振動板と、圧電ユニモルフ振動板の一端を固定して支持する空洞部を有する支持体と、圧電ユニモルフ振動板に弾性体を介して接続され、圧電ユニモルフ振動板の圧電駆動により空洞部内で回転振動する基板とで構成される。基板上に受光素子3が配置され、該基板の回転角度に対する反射光の強度分布から被検知物Wの位置を求める。
(もっと読む)
監視装置
【課題】 小型の装置により、鮮明な監視画面を得ることのできる監視装置を提供することを目的とする。
【解決手段】 レーザレーダ制御部2内の画像処理装置25が、ICCDカメラヘッド123から出力された画像信号をCCDカメラの1フレーム期間に渡って蓄積し、蓄積した複数の画像信号を重畳して監視画像を作成することにより、輝度の高い監視画像を得る。
(もっと読む)
受光装置、レーザレーダ装置および乗り物
【課題】測定精度の低下または対象物の誤検出が十分に防止された受光装置およびそれを備えたレーザレーダ装置ならびにそのレーザレーダ装置を備えた乗り物を提供する。
【解決手段】APD81にバイアス電圧Vbaが印加される。APD81に光が入射すると、APD81には入射光量Pに応じた電流が流れる。コンデンサ83はAPD81の出力電流の直流成分を除去し、入射光電流Idを出力する。I−V変換回路84は入射光電流Idを入射光電圧Vdに変換する。増幅回路85は入射光電圧Vdを増幅し、受光パルスVaを出力する。反転増幅回路86は受光パルスVaを反転増幅し、反転増幅電圧Viaを出力する。半波整流回路87は反転増幅電圧Viaを半波整流し、ノイズレベルVnDCを出力する。バイアス制御回路88はノイズレベルVnDCに基づいてバイアス電圧Vbaを負帰還で制御する。
(もっと読む)
測定装置および測定システム
【課題】廉価に製造することができ、効率が高められた測定装置を提供する。
【解決手段】放射装置と、反射された放射を検出する検出装置と、放射装置および検出装置を制御し、且つ検出装置の検出結果を処理する評価回路とを有し、放射装置は垂直方向の放出方向を有する第1の表面発光型の半導体素子を有し、この半導体素子は垂直方向において相互に間隔を置いて配置されており、且つ放射の生成に適している複数のアクティブ領域が設けられている半導体ボディを包含し、2つのアクティブ領域間においてはトンネル接合部が半導体ボディ内にモノリシックに集積されており、且つ2つのアクティブ領域はトンネル接合部により半導体素子の動作時に導電的に接続されている。
(もっと読む)
ビーム照射装置およびレーザレーダ装置
【課題】小型の簡素な構成によって、レーザ光の走査の容易な制御を実現できるビーム照射装置を提供する。
【解決手段】このビーム照射装置1は、レーザ光20を出射する光源11を備える。また、光源11から出射されたレーザ光20を反射し、目標領域に向けて照射させるミラー15を備える。また、ミラー15を移動させてレーザ光20を走査させる移動機構17を備える。また、ミラー15において分離されたレーザ光20の一部である分離光21を受光するとともに、受光面上における分離光21の受光位置を検出する検出部19を備える。また、光源11と移動機構17とを制御する制御回路30を備える。そして、上記ミラー15は曲面ミラーであり、移動機構17は曲面ミラー15を平行移動させるものであって、曲面ミラー15は、レーザ光20が入射する側の面である第1面において、レーザ光20を反射する。
(もっと読む)
レーダ装置
【課題】一層の検出感度向上を図ることが可能なレーダ装置を提供する。
【解決手段】レーザダイオード12から出力したレーザ光を、凸レンズ23を介して出力する。この凸レンズ23をスキャンアクチュエータ25によりレーザダイオード12に対して揺動させる。これにより、レーザ光の出力方向を変化させることができ、また、走査角度範囲を狭い範囲にすることができる。そして、反射光を受光部50にて逐次受光して、反射光に応じた受光信号を演算部70に出力する。演算部70では、互いに隣接して出力される所定数のレーザ光に対応する所定数の受光信号を積算して積算信号とする。この積算信号に基づいて反射物体を検出する。
(もっと読む)
81 - 100 / 148
[ Back to top ]