
Fターム[5J084BA49]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754) | 1次元走査を行うもの (148)
Fターム[5J084BA49]に分類される特許
121 - 140 / 148
レーダ装置
【課題】検出エリア外に外れる物体についてその存在位置を推定し続けることができ、かつ検出エリア外から検出エリア内に侵入してくる障害物などを早期に検出することができるレーダ装置を提供する。
【解決手段】レーザレーダ装置(車両用測距装置)は、レーザ光を2次元スキャンするスキャナ13と、制御回路11とを備えている。制御回路11は、スキャナ13の検出エリア左右端において、片斜面分布を抽出する。この片斜面分布の距離値、受光レベル、検出領域幅、および面積値からなる割り込み情報を記録する。今回のフレームで抽出した割り込み情報を過去の割り込み情報と比較し、割り込み可能性を算出する。この割り込み可能性に基づいて検出エリア外からの侵入車両を早期に検出する。
(もっと読む)
3次元測定装置及び3次元測定装置を搭載した自律移動装置

【課題】 本発明は、測定目的等に応じて測定条件を変更することができる3次元測定装置を提供することを目的とする。
【解決手段】 本発明の3次元測定装置18は、距離データを測定するレーザレンジセンサ20と、レーザレンジセンサ20を回転させる回転装置30と、回転装置30の回転角を検出するエンコーダ38と、レーザレンジセンサ20とエンコーダ38に接続された演算部52aと、回転周期を設定する設定手段52cと、設定された回転周期で回転装置30を駆動する回転制御部52bとを有する。
(もっと読む)
レーザ監視方法
【課題】海上における対象物を簡易にしかも効率良く監視又は捜索することができるレーザ監視方法を提供する。
【解決手段】本実施例に係るレーザ監視方法は、自走体であるヘリコプタ21から対象物11に対して、アスペクト比が1:20以上のスリット状のレーザ光22を照射し、反射する反射光を信号処理する。そして、スリット状のレーザ光22を連続して照射することにより(1回、2回・・・)、広範囲な海域において対象物11を迅速に発見することができる。
(もっと読む)
光学装置
【課題】ハウジングの透光窓のうち、光学系により投受光される光が通過する通過領域の汚損の有無を的確に検出すると共に、その他の領域に付着した異物によって前記通過領域における汚損の有無の検出が阻害されることを回避する。
【解決手段】周壁部2に透光窓3を有するハウジング4の内部に、透光窓3を介して光を投受光する光学系5と、透光窓3を介して対向配置された投光器6および受光器7と、投光器6から透光窓3を通過して受光器7に至る光に基づいて透光窓3の汚損の有無を検出する汚損検出部8とを備えた光学装置1であって、透光窓3を上下方向に沿う姿勢又は上端が下端よりも外側に位置する傾斜姿勢で配置し、周壁部2に透光窓3の上端又はその上方で透光窓3よりも外側に突出する突出部2aを設け、投光器6および受光器7のいずれか一方を突出部2aに、他方を透光窓3の上端よりも下方における透光窓3の内側にそれぞれ配置した。
(もっと読む)
光学式測定方法及び光学式測定装置
【課題】 簡単な構成で、多様な測定に対応できるようにすること。
【解決手段】 光源11から測定対象物12の測定対象位置17に測定用光を照射し、相互の位置関係は既知であると共に光源11とは位置関係が無関係な任意の位置に配設された受光レンズ13及び光検出素子15、受光レンズ14及び光検出素子16によって、測定対象位置17で反射した測定用光を検出し、所定位置を基準とする測定対象位置17の座標、所定位置から測定対象位置17までの距離または、測定対象物12の形状を算出する。
(もっと読む)
測距装置
【課題】対象物までの距離を精度良く測定することを課題とする。
【解決手段】測距装置10は、方向調節機構12Lおよび方向調節機構12Rを通じて照射方向を調節しつつ、照射器11Lおよび照射器11Rから近赤外線光を照射し、照射器11Lおよび照射器11Rによって照射された第1の送出波および第2の送出波の反射波の輝度値が閾値以上である場合に照射線の交点で物体と接触したと判別し、その照射交点接触時の第1の送出波および第2の送出波の照射角度を検出し、該検出した第1の送出波および第2の送出波の照射角度に基づいて、当該照射線の交点までの距離を算出する。
(もっと読む)
移動車両
【課題】自律的に移動する移動車両において、低コストで簡単な構成により、障害物や床面の起伏を検知して安全に停止可能とする。
【解決手段】移動車両1は、駆動部2と、測定面S内における障害物までの距離を検知する2次元センサ3と、2次元センサ3の検出出力に基づいて回避不能な障害物が走行方向前方に存在することが判明したとき駆動部2を制御して走行を停止させる停止手段4と、を備える。2次元センサ3は、前方の走行路面10と測定面Sとが走行方向前方の障害物回避に必要な距離dだけ離れた位置において交差するように下方に向けて設置され、2次元センサ3による距離測定範囲が移動車両1の車幅Wに左右の余裕幅αを加えた範囲内であり、停止手段4は、2次元センサ3により検知された距離が走行路面10と2次元の測定面Sとが交差する位置を示す距離でないとき移動車両1の走行を停止する。
(もっと読む)
レーザスキャン装置
【課題】時間的損失がなく、全測距領域においてゲインコントロールを行うことができるレーザスキャン装置を提供する。
【解決手段】次回測距領域の反射光を受光するように、ゲイン調整用受光素子16を測定用受光素子13の周囲に設ける。距離計測部11は、ゲイン調整用受光素子16において検出した受光強度から照射強度に対する反射強度の割合を算出し、測定用受光素子13で検出した受光強度が飽和しない理想的な補正ゲインを求める。距離計測部11は、ゲイン制御部19に、求めた補正ゲインを設定する。これにより、時間的損失無く略全測距領域においてゲイン調整を行うことができる。
(もっと読む)
光走査装置および被測定物検出装置
【課題】光の走査領域内の存する被測定物の表面が液体で覆われている場合であっても、直線偏光をなす光を、かかる液体を介して被測定物の表面に対して的確に走査することにある。
【解決手段】光を出射する投光部3と、投光部3から出射された光を回転しながら反射して、光を周囲空間の所定領域に走査する投光用ミラー5とを備えた光走査装置2であって、投光部3が直線偏光をなす光を出射し、投光部3から投光用ミラー5に至るまでの光路上に、直線偏光をなす光の偏光状態を円偏光に変換する1/4波長板12を配設し、投光部3から出射され、投光用ミラー5で反射される光の光路上に、円偏光をなす光の偏光状態状態を直線偏光に変換する1/4波長板13を配設した。
(もっと読む)
光ビーム走査装置
【課題】光偏向素子の原点位置を高い精度で行うことのできる光ビーム走査装置を提供すること。
【解決手段】光ビーム走査装置1は、光源装置10と、光源装置10から出射された光ビームの入射位置により光ビームL0の出射方向が変化する光走査領域36を備えた透過型光偏向ディスク30と、この透過型光偏向ディスク30を回転駆動する駆動装置とが構成されている。透過型光偏向ディスク30には、入射した光ビームL0を光走査領域36とは異なる方向に出射する原点位置検出用出射領域82が形成され、この原点位置検出用出射領域82から光ビームが出射される方向には原点位置検出用光検出器81が配置されている。
(もっと読む)
自己混合レーザを用いる三次元計測内視鏡
【課題】これまでの内視鏡において対象物までの距離を測るには対象物にスポット光を照射し、三角法に基づいて距離を求めていたが、基線長が短く精度に問題があった。また自己混合半導体レーザによれば近距離でも精度よく距離が測れるが、多点における計測が困難であった。
【解決手段】観察範囲の中央部を自己混合半導体レーザによる距離測定とし、周辺部をパターン投影法による距離測定とすることにより、自己混合半導体レーザの測定点の少なさを解消し、対象物の三次元計測の精度向上ができる。また、中央部において自己混合半導体レーザにより測定した結果を、パターン投影法による測定結果に反映させることにより、パターン投影法による測定結果の補正も行える。
(もっと読む)
光学式測距方法
【課題】アンプにAGC回路を取り付けた上で、演算距離に含まれる誤差を的確に補正する。
【解決手段】被測定物8の距離測定前に、AGC回路7が作動する範囲で、受光素子5で受光される測距光の光量レベルを変化させながら一の既知距離を測定し、各光量レベルでの演算距離に応じた距離補正値を示す第一補正関数と求めると共に、AGC回路7が非作動となる範囲で、受光素子5で受光される測距光の光量レベルを一定に保ちながら異なる複数の既知距離を測定し、各既知距離での演算距離に応じた距離補正値を示す第二補正関数を求める。被測定物8の距離測定時に、AGC回路7が非作動状態にある場合には、第一補正関数に基づいて被測定物8までの演算距離に基づいて被測定物8までの演算距離を補正し、AGC回路7が作動状態にある場合には、第一補正関数および第二補正関数に基づいて被測定物8までの演算距離を補正する。
(もっと読む)
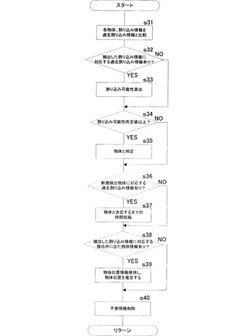
物体検出ユニット、物体検出装置、横断路の移動物体検知装置及びプログラム
【課題】表面が滑らかで光沢のある黒い物体などレーザ光線の反射率が低い物体の位置、形状を正確に検出する物体検出ユニットを提供する。
【解決手段】物体検出部20a〜20dが読み出された固定物体の位置データ中から距離の測定値を示す信号のあるレーザ光線の照射角度ごとに、そのレーザ光線の照射角度に対応する監視領域内に存在する物体の位置データ中から受光なしを示す信号のあるレーザ光線の照射角度を抽出する(S125)。そして、抽出されたレーザ光線の照射角度がある場合には、物体検出部20a〜20dがそのレーザ光線の照射角度の位置には、レーザ光線を反射しない移動物体が存在すると判断する。一方、抽出されたレーザ光線の照射角度がない場合には、物体検出部20a〜20dが監視領域内にレーザ光線を反射しない移動物体が存在しない、と判断する(S130)。
(もっと読む)
自律移動装置及び平面状障害物認識方法
【課題】自律移動装置において、平面状障害物の位置を容易に認識可能とし、自己位置を特定して、効率的で安全な自律走行を可能とする。
【解決手段】レーザビームを用いて水平面内をスキャンし、反射波を受信して複数のスキャンポイントの座標を取得し、得られた順番が時系列的に前後する2つのスキャンポイントについて、前のスキャンポイントを始点とし後のスキャンポイントを終点とする要素ベクトルを形成し、時系列的に前後し、かつ互いに連続する複数の要素ベクトルであって、要素ベクトルの長さがそれぞれ第1所定長以下であり、振れ角度が第1所定角度以下であり、振れ角度の積算値が第2所定角度以下であるものを選択し、ベクトル合成して1つのスキャンセグメントベクトルし、スキャンセグメントベクトルの始点と終点により定義される線分が第2所定長以上であるときに、そのスキャンセグメントベクトルに沿って平面状障害物が存在していると認識する。
(もっと読む)
物体検出装置
【課題】物体の個体識別を簡素化するとともに高速化することができる物体検出装置を提供する。
【解決手段】レーザレーダ装置7は、検知領域内の物体を検知して(S101)、反射光量データを得るとともに(S103)、自車101から物体までの距離および方位を取得する(S103)。レーダ装置7は、取得した反射光量データに基づき、検知物体を高反射体または低反射体に属性判別する(S104)。CCDカメラ4は検知領域を撮像し(S105)、画像データ生成部5は画像データを生成する(S106)。画像処理部6は、レーダ装置7で得られた物体検知情報と属性情報とから画像データ上でのマッチング処理領域を設定して、それぞれの属性に応じたサンプリングパターンでパターンマッチングを行う。画像処理部6は、このマッチング結果に基づいて物体の個体識別を行う(S107)。
(もっと読む)
光学式レーダ装置
【課題】部品点数が少なく簡易な構成で、発光素子が照射している波長を中心とする狭帯域の光のみを通すバンドパスフィルタを備えた光学式レーダ装置を提供する。
【解決手段】
発光素子2からミラー5を介して照射した光104を測定対象物101で反射させて、受光レンズ4、6を介して、バンドパスフィルタ7を通して、受光素子8に導く。バンドパスフィルタ7の波長は可変であり、バンドパスフィルタ駆動部18は、バンドパスフィルタ7の波長を調整する。また、発光素子2の温度を検知する温度検出部16を備える。発光素子2から照射する光の波長がドリフトするに合わせて、距離測定制御回路15は、この温度に対応する発光素子2の波長から、バンドパスフィルタ駆動部18を制御する。
(もっと読む)
走査型レンジセンサ
【課題】 近距離での死角を可及的に減少させると共に、受光部へ不要な光が回り込むことを防止する。
【解決手段】 投光部3と同一直線X上に配置される受光部4と、受光部4を内部に収容しながら直線Xを回転中心として回転駆動されるキャップ部材7と、直線X上に傾斜した状態でキャップ部材7の上端壁部7b外面に固定され且つ投光部3から出射された光をキャップ部材7の半径方向外方に向けて走査する投光ミラー5と、直線X上に傾斜した状態でキャップ部材7の上端壁部7b内面に固定され且つ投光ミラー5の走査によって半径方向外方に形成される走査領域からの反射光を受光部4に入射する受光ミラー6と、半径方向外方に固定され投光ミラー5で反射した投光部3からの光を受光ミラー6に向けて折り返す導光部材8を備える。
(もっと読む)
人間検知器
【課題】 連続して利用者を追尾できる自動改札機用人間検知器を提供する。
【解決手段】 光線(ビーム光線)を発生させる発光器と、光線を受光する受光器と、自動改札機の本体の上方の所定位置に設けられた反射鏡と、発光器から照射された光線を前記反射鏡に向くように反射させるとともに、その反射鏡から照射されてくる光線を受光器に向くように反射させるガルバノミラーと、発光器からガルバノミラー及び反射鏡を介して照射されてきた光線を自動改札機の本体の改札通路を走査するようにそのガルバノミラーを駆動制御するガルバノミラー制御手段と、発光器から照射された光線が自動改札機の本体の改札通路内で反射されて受光器に到達するまでの時間に基づいてその改札通路内の利用者を検知する検知手段とを有する。
(もっと読む)
検出装置
【課題】 レーザ光を目標位置に照射して目標位置の状況を検出する検出装置において、対向車からのレーザ光を受光したような場合など、他の検出装置からのレーザ光を受光したような場合にも、これにより誤検出が生じないような検出装置を提供する。
【解決手段】 数種の変調パターンのうち目標位置毎に個別に設定した変調パターンにてパルスレーザ光を変調してレーザ出射部401から目標位置に出力する。DSP10は、レーザ出射部401から出力したパルスレーザ光の変調パターンとレーザ受光部402によって受光したパルスレーザ光の変調パターンがマッチングしたときのみ目標位置に障害物が存在するとして検出し、障害物との距離を測定する。これにより、誤って対向車等からパルスレーザ光を受光しても、これをもとに目標位置の状況を誤検出する惧れが抑制される。誤検出の可能性は、変調パターンの種類を増やす程、抑制される。
(もっと読む)
ビーム照射装置
【課題】 簡素な構成にて、走行状況を判定し、この判定結果に基づいて車両制御用情報を設定することができるビーム照射装置を提供する。
【解決手段】半導体レーザ100からのレーザ光は、レンズアクチュエータ300に支持された照射レンズに入射される。照射レンズを通過したレーザ光は、レンズアクチュエータ300の駆動に応じて、Y−Z平面方向に出射角度が変化する。これにより、目標領域におけるレーザ光のスキャンが行われる。照射レンズを通過したレーザ光は、ビームスプリッタ400によってその一部が反射され分離される。分離された光は、集光レンズ500を通してPSD600上に収束される。DSP制御回路10は、PSD600からの信号をもとに、照射レンズを通過したレーザ光のスキャン位置をモニタする。そして、照射位置がスキャン軌道から外れたとき、悪路等により走行状況が良くない、と判断し、車高の高さ、あるいは、ダンパーの減衰力などの車両制御用情報を設定する。
(もっと読む)
121 - 140 / 148
[ Back to top ]