
Fターム[5J084BA49]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754) | 1次元走査を行うもの (148)
Fターム[5J084BA49]に分類される特許
41 - 60 / 148
マルチ信号処理装置、測距装置、及びマルチ測距システム
【課題】高分解能の測距精度を確保しながらも極めて安価に複数台の測距装置をロボット等に組み込むことが可能なマルチ信号処理装置等を提供する。
【解決手段】
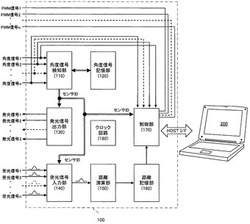
複数の測距装置1と接続され、各測距装置1から入力される発光要求信号のエッジを検知すると対応する測距装置の発光部を駆動する発光信号を出力する発光制御部110,120,130と、発光制御した測距装置の受光部から受光信号を入力する入力処理部140と、入力処理した受光信号に基づいて被測定物迄の距離を算出する演算処理部150と、各処理部により実行される一連の処理を、任意の測距装置から入力される走査角度信号の一周期内で、各測距装置に対して順番に実行させるジョブ管理部110,120とを備えている。
(もっと読む)
距離測定装置および距離測定方法

【課題】
光コムを用いた距離測定装置において、光量不足、多数の自己ビートから必要なビートのみを信号雑音比(SN比)よく抽出することが困難であるという課題を解決し、反射率が低い表面または表面が散乱面である10m程度遠方の被測定物までの絶対距離を0.1mm以上の精度で光学的で非接触な手法により簡便に測定できるようにする。
【解決手段】
対象物までの距離を測定する距離測定装置において、光源と対象物で反射または散乱された複数のCWレーザーの間のビート信号のビート信号の位相と,光源と対象物へ照射する前の複数のCWレーザーによるビート信号のビート信号の位相を比較することによって対象物までの距離を測定するようにした。
(もっと読む)
車軸検知装置
【課題】 軸数センサを道路に埋め込むことなく、レーンを通行する車両の車軸を検出することを目的とする。
【解決手段】 強度変調したレーザ光を走査し、路面に向かって斜め下方にレーザ光を放射する微細電子機械素子スキャナと、物体から反射してくる反射光を受光する長尺フォトダイオードとを有した送受光学部を備えて、長尺フォトダイオードの出力光信号の検波信号からレーザ光の反射点までの距離を計測し、得られたレーザ光の反射点までの距離及びレーザ光の照射方向に基づいて車両のタイヤを検知し、軸数をカウントする。
(もっと読む)
計測車両、道路地物計測システム
【課題】移動体にレーザレーダを搭載して地面や壁面に照射し、移動しながら目標物の位置を計測しようとする場合、複数のレーザレーダを用いることは多いが、レーザレーダを単に平行に並べて設置すると、移動速度によって計測点の密度にムラが発生したり、走行に平行な方向と垂直な方向とで計測点の密度差が大きい、という問題があった。
【解決手段】レーザレーダ同士に角度を持たせて設置することにより、計測点の密度のムラや方向による密度差の大きさを軽減することができる。
(もっと読む)
異物検出装置
【課題】ターゲットに照射して戻ってくる散乱光の偏波成分によらず異物の3次元形状を高精度に検出できる異物検出装置を得る。
【解決手段】連続波信号で変調されたレーザ光を出力する光源6と、レーザ光を用いてターゲットの捜索範囲を走査するスキャナ10と、ターゲット表面で散乱される散乱光を偏波成分ごとに分離する偏波ビームスプリッタ12と、散乱光の各偏波成分をそれぞれ受光する受信レンズ13a、13b、及び光受信機14a、14bで構成される受光手段と、レーザ光と散乱光の各偏波成分との位相差及び散乱光の各偏波成分の受信強度を検出する位相検波器15a、15bと、これらの検出結果に基づいて散乱光の偏波解消度を算出すると共に、偏波解消度の算出結果に応じて異物との離間距離を算出し異物の3次元形状を出力するパソコン3と、を備えたものである。
(もっと読む)
光走査装置及びレーザレーダ装置
【課題】小型化、低コスト化を実現できるとともに、受光感度がよくて距離測定精度の高いレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置10は、装置本体を構成するベースフレーム12と、ベースフレーム12の所定位置に固定され、レーザ光を出射する光源14と、光源14からの出射光を図示しない対象物に向けて走査する光走査装置16とを有している。光走査装置16はリコン基板から半導体微細加工法により可動板(反射ミラー)やトーションバー等が一体に形成されており、可動板の中央部にはフォトダイオードが一体に形成されている。対象物からの反射光22は、光学部品を介することなく直接フォトダイオードにより受光される。
(もっと読む)
レーザ測定装置
【課題】レーザ光の走査方向を様々な向きに変化させやすく設置場所に応じた多様なエリア設定が可能な構成をより小型且つ簡易に実現する。
【解決手段】レーザ測定装置1は、偏向部41を中心軸42aに対して相対的に変位させることで、空間に照射されるレーザ光L1の水平面に対する傾斜角度を変化させる傾斜角度変更部100を備え、更に、偏向部41からのレーザ光L1の走査経路上に配置される受光面91を備え、当該受光面91に入射するレーザ光L1の入射高さを検出する受光センサ90が設けられている。そして、レーザダイオード10にてレーザ光L1が発生してから当該レーザ光L1に応じた反射光がフォトダイオード20によって検出されるまでの経過時間を検出すると共に、その経過時間と受光センサ90によって検出された入射高さとに基づいて検出物体の位置を検出するように構成されている。
(もっと読む)
光波距離測定装置
【課題】 近距離から遠距離までの受光レンジにわたって測定に支障なく受光光量が得られ、もって、高精度で安定した測距を行うことができる光波距離測定装置を提供する。
【解決手段】
本発明の光波距離測定装置は、測定光を検出物体1に向けて投光する投光系4と、この検出物体1からの反射光を集光する一枚の受光レンズ11と、受光レンズ11により集光された反射光を受光する受光素子12とを有し、受光レンズ11のレンズ周辺部位が近距離に存在する検出物体1を検出する近距離検出用レンズ部位11aとされ、受光レンズ11の近距離検出用レンズ部位よりも内側のレンズの部位が遠距離に存在する検出物体1を検出する遠距離検出用レンズ部位11bとされている。
(もっと読む)
レーザレーダ装置
【課題】検出物体の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】フォトダイオード20により検出時間Tが所定の時間範囲ΔT内にあるとして検出される反射光のうち、その光量に対応する受光信号の振幅Aが、異物反射光量Lsより低く設定された異物検出閾値Ad以上であり異物反射光量Lsより高く設定された近点検出閾値An未満である反射光を無効とし、当該振幅Aが近点検出閾値An以上である反射光の検出時間Tに基づいて検出物体までの距離が測定される。
(もっと読む)
光導波路装置および校正システム
【課題】レーザレーダ装置から出射されたレーザ光の反射光が装置内へ入射するまでの時間を長くし得る光導波路装置を提供する。
【解決手段】光導波路装置30は、校正システム10の校正対象であるレーザレーダ装置20から窓部22を透過したレーザ光L0が導入口31aから入射する光導波路31が設けられており、この光導波路31は、その全長が導入口31aと窓部22との間の距離に対して長くなるように複数回巻回されて構成されている。
(もっと読む)
光走査装置、レーザレーダ装置、及び光走査方法
【課題】広角度の視野領域の全範囲において感度を一定に保持することができる光走査装置、レーザレーダ装置、及び光走査方法を提供する。
【解決手段】水平方向に対して予め定めた傾斜角度で交差するように配置された透明平板を通してレーザ光を走査する場合に、光源から射出されたレーザ光を水平方向に走査すると共に、光源から射出されたレーザ光の偏光面を透明平板の傾斜角度及び水平方向の方位角に応じて回転させて、偏向されたレーザ光を透明平板側に出力し、透明平板を通してレーザ光を走査する。
(もっと読む)
物体検出システム
【課題】複数のレーザセンサを備えた物体検出システムにおいて、あるレーザセンサから出力したレーザ光を他のレーザセンサが検出することによる誤検出を抑制する。
【解決手段】レーザセンサAは、自身の回転ミラー50の回転角度を算出し(ステップS2)、また、他方のレーザセンサBの回転ミラー50の回転角度を取得し(ステップS3)、これらステップS2、S3で算出、取得した回転角度と、記憶装置130に記憶されている誤検出角度関係とから、誤検出の危険性があるか否かを予測する(ステップS4)。そして、誤検出の危険性があると予測した場合、誤検出の危険性がなくなるように、モータ80の回転速度を調整する(ステップS5)。そのため、レーザセンサBから出力されるレーザ光L3を自身のフォトダイオード100が検出してしまうことが抑制され、その結果、実際には存在しない物体を検出したと判断してしまう誤検出を抑制できる。
(もっと読む)
測距方法及びレーザ測距装置
【課題】レーザ光の特徴である可干渉性を利用するとともに、被測定物の2つの測定点間の厚み方向の距離を高精度に測定する測距方法及びレーザ測距装置を提供することを目的とする。
【解決手段】本発明に係る測距方法及レーザ測距装置によれば、測定光を第1測定光と第2測定光とに分割し、第1測定光を被測定物6の第1測定点S1に照射した上で、第1測定光と参照光との光路長が等しくなる反射点の位置を取得する。また、第2測定光を被測定物6の第2測定点S2に照射した上で、第2測定光と参照光との光路長が等しくなる反射点の位置を取得する。そして、これらの位置に基づいて第1測定点S1と第2測定点S2間の厚み方向の距離を高精度に測定する。
(もっと読む)
距離測定装置
【課題】レーザー光の必要な光量を確保した上で安全性の向上を図る。
【解決手段】レーザー光を出射するレーザー光源2と、レーザー光源から出射されたレーザー光を略平行光にする光学素子3と、所定の角度範囲で回動可能とされ光学素子によって略平行光にされたレーザー光を被測定物100へ向けて反射しレーザー光によって被測定物を走査する投光用ミラー4bと、被測定物で反射されて拡散されたレーザー光を反射する受光用ミラーと、受光用ミラーで反射されたレーザー光を受光する受光素子と、受光用ミラーで反射されたレーザー光を受光素子に集光して導く集光光学系と、受光素子で受光したレーザー光に基づいて生成される受光信号を処理することにより被測定物に関する距離情報を算出する制御部とを備え、レーザー光源と被測定物の間の光路上に光路範囲における外周部のレーザー光を遮蔽する遮蔽部材9を設けた。
(もっと読む)
距離測定装置
【課題】受光素子に対する十分な受光量を確保すると共に受光素子における受光面積の小型化を図る。
【解決手段】レーザー光を出射するレーザー光源2と、レーザー光源から出射されたレーザー光を略平行光にする光学素子3と、所定の角度範囲で回動可能とされ光学素子によって略平行光にされたレーザー光を被測定物100へ向けて反射しレーザー光によって被測定物を走査する投光用ミラー4bと、被測定物で反射されて拡散されたレーザー光を集光する集光レンズ5と、集光レンズによって集光されたレーザー光を受光する受光面7aを有する受光素子7と、レーザー光の径を絞る開口部6aを有し集光レンズと受光素子の間に配置された開口絞り6と、受光素子で受光したレーザー光に基づいて生成される受光信号を処理することにより被測定物に関する距離情報を算出する制御部とを備え、受光素子を開口絞りの近傍に配置した。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
走行体
【課題】 回転走査型光学式測距センサの計測値の異常検出を行うことができる技術を提供する。
【解決手段】 前面に凹部2を有する走行体の外郭部3と、凹部2に設けられ、回転走査を行って凹部2から走行体の前方を臨む領域に存在する物体までの距離を測定する光学式の回転走査型距離センサ4と、凹部2の回転走査型距離センサ4の後方に設けられ、回転走査型距離センサ4によって測定される少なくとも二つの異なる既知の距離の経路L1,L2を形成する経路形成部5と、経路形成部5により形成された少なくとも二つの距離を回転走査型距離センサ4が計測した値l1、l2に基づいて、回転走査型距離センサ4の異常を検知する異常検知部6とを有する。
(もっと読む)
距離測定装置
【課題】距離測定装置に入射した光が前方の搬送台車からの反射光であるか否かを高精度で識別でき、誤検知による搬送台車の誤停止等を解消できる距離測定装置を提供する。
【解決手段】軌道に沿って走行する搬送台車の前部に、変調された測定光を平面状に走査する走査部と、走査部で走査された測定光と検出物からの反射光との時間遅れから検出物までの距離を算出する距離演算部とからなる測距装置を配置し、測距装置により前方を走行する搬送台車の後部に配置された再帰性反射部材からの反射光に基づいて搬送台車間の車間距離を検知する距離測定装置であって、走査部により走査された測定光の複数の走査角度と、距離演算部により算出された各走査角度に対応する距離と、各走査角度に対応する反射光の強度のうち、何れか二つの相関関係に基づいて、再帰性反射部材からの反射光であるか否かを識別する識別部を備える。
(もっと読む)
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。 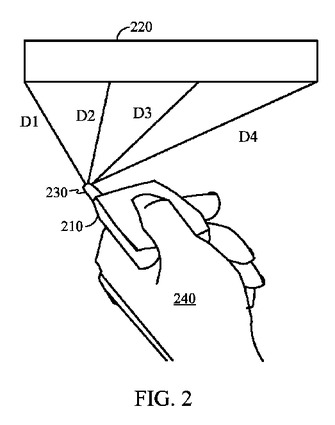 (もっと読む)
(もっと読む)
目標物体を検出するためのドア感知システム
【課題】外部での適用例などに応用する際の使用に適した光スキャナ装置を提供すること、また、長い使用期間にわたって適切な動作が確保される光スキャナ装置を提供することにある。
【解決手段】目標物体(56)の距離範囲及び角方向を計測するための光スキャナ装置(10)であって、光パルスを送信するようになされたパルス源(12)と、この送信光パルスを反射し且つ可変掃引方向に掃引面(15)内部の掃引区域を横切って掃引するようになされた送信偏向手段(20)と、掃引面(15)内で反射された受信光パルスを検出するようになされた光検出手段(42)と、掃引面(15)内で反射された光パルスを反射し且つ反射された光パルスを光検出手段(42)に再誘導するようになされた受信偏向手段(24)と、光遮断手段(32)を備える。
(もっと読む)
41 - 60 / 148
[ Back to top ]