
Fターム[5J084BA49]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754) | 1次元走査を行うもの (148)
Fターム[5J084BA49]に分類される特許
141 - 148 / 148
ビーム照射装置

【課題】 簡素な構成にて、円滑且つ安定したスキャン動作を実現できるビーム照射装置を提供する。
【解決手段】 半導体レーザ100からのレーザ光は、レンズアクチュエータ300に支持された照射レンズに入射される。照射レンズを通過したレーザ光は、レンズアクチュエータ300の駆動に応じて、Y−Z平面方向に出射角度が変化する。これにより、目標領域におけるレーザ光のスキャンが行われる。このとき、DSP制御回路10は、レーザ光が目標照射領域に一定間隔で照射されるよう、アクチュエータ駆動回路40から正弦波による制御信号を出力するよう制御し、前記制御信号に対応するタイミングにてレーザ光を照射するようレーザ駆動回路を制御する。
(もっと読む)
三次元センサを用いるエレベータエリアの監視
本発明は、三次元画像情報を取得するための3D半導体センサ79を用いて、エレベータエリアを監視するための装置に関する。半導体センサ79は、監視されるべきエレベータエリアが、光源によって照光される領域に配置されるようにして取り付けられる光源と、反射光を受光するようにして取り付けられるセンサ群と、電気的信号を画像情報に変換するための処理チップとを備えている。装置には、三次元画像情報を供給するために半導体センサ79に接続されている処理ユニット80も設けられている。処理ユニット80は、監視されるべきエレベータエリアの状態をあらわす状態情報を得るために、画像情報を処理する。 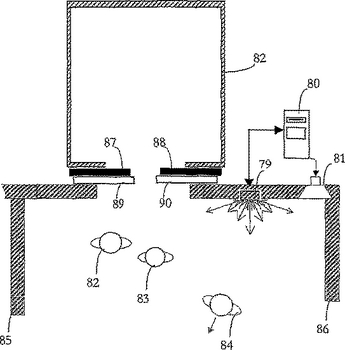 (もっと読む)
(もっと読む)
車載用レーダ装置

【課題】 自車前方を走行する先行車両を検出対象物体として検出する車載用レーダ装置の送信波および受信波において高いS/N比を実現する。
【解決手段】 一定時間内に複数回の送信波109を送信する送信部101aと、互いに角度が異なる複数の偏光面の各面が、前記送信部101aの送信波109出力方向に対して一定の角度を保つように設けられた偏光部105aと、前記送信部101aないし前記偏光部105aの少なくとも一方を他方に対して相対移動させることで、前記送信波109の出力方向に存在する前記偏光面を切り替える駆動部201と、前記偏光部105aにより偏光された前記送信波109に対応する反射波111を受信した際に、該反射波111に基づいた受信信号を出力する受信部110aと、前記受信部110aが受信した反射波111を前記偏光面単位で積算する積算部117aとを備える。
(もっと読む)
車載用監視装置
【課題】 走行中であっても前走車両の有無や前走車両との距離などを確実に検出可能な車載用監視装置を提供すること。
【解決手段】 車載用監視装置1において、レーザ光Lを所定の角度範囲にわたって走査させながら投光する光走査機構3は、レーザ光源40と、レーザ光源20から出射された光を偏向して投光する凸レンズからなる投光用偏向素子20と、投光用偏向素子20が搭載された可動部材60と、可動部材60を水平方向の所定の範囲にわたって往復駆動するステッピングモータ構造の磁気駆動装置50とを備えている。磁気駆動装置60は、可動部材60側に搭載されたマグネット55と、マグネット55の着磁面に対向する極歯を備えた第1および第2のステータ51、52とを有し、第1のステータ51および第2のステータ52は、面内方向で離間した位置に配置されている。
(もっと読む)
レーザー光利用接近検知システム
【課題】 クレーン等の重機が送電線に対して接近したことを検知する新規なレーザー光利用接近検知システムを提供すること
【解決手段】 クレーンの移動するブームの先端部に配置され、送電線の相対的な動きに追従するCCDカメラと、前記CCDカメラに連動して照射方向を変更するレーザー距離計と、前記レーザー距離計に適当なインターフェイスによって接続されたコンピュータとを備え、前記レーザー距離計は、前記送電線までの距離を測定する。
(もっと読む)
自動ドア周辺を検出するレーザ監視及び感知装置
【課題】外部での適用例などに応用する際の使用に適した光スキャナ装置を提供すること、また、長い使用期間にわたって適切な動作が確保される光スキャナ装置を提供することにある。
【解決手段】目標物体(56)の距離範囲及び角方向を計測するための光スキャナ装置(10)であって、光パルスを送信するようになされたパルス源(12)と、この送信光パルスを反射し且つ可変掃引方向に掃引面(15)内部の掃引区域を横切って掃引するようになされた送信偏向手段(20)と、掃引面(15)内で反射された受信光パルスを検出するようになされた光検出手段(42)と、掃引面(15)内で反射された光パルスを反射し且つ反射された光パルスを光検出手段(42)に再誘導するようになされた受信偏向手段(24)と、光遮断手段(32)を備える。
(もっと読む)
環境認識システムおよび移動機構
【課題】
測距ターゲットが移動しているときや測距システムが移動しているときでも、正確に測距ターゲットを認識する。
【解決手段】
環境認識システム1は、変調されたビーム102を用いて相対的に移動する物体2を認識する。ビーム発射手段12は、ビームを発射する。ビーム走査手段13は、ビームを走査する。物体からの反射ビームをビーム受信手段が16検出する。ビーム受信手段が受信した信号に基づいて距離画像を距離計測手段17が取得する。距離計測手段が取得した複数の画像を比較して距離画像に含まれる物体の歪みを歪み除去手段が除去する。
(もっと読む)
離れている2つの送信機および受信機を持つ周辺検出システム
本発明は、電磁波の2つの送信機および送信された電磁波の反射を受信するため適当に向けられる2つの受信機を備えた周辺検出システムに関し、第1の送信機が第1の受信機と共に、第1の目標領域に向けられ、第2の受信機が第2の受信機と共に、第2の目標領域に向けられている。第3の目標領域を検出するため、少なくとも第1の送信機の前に、この送信機から送信される電磁波の少なくとも一部を第3の目標領域へ少なくとも一時的に向ける光学手段が設けられ、少なくとも第2の受信機の前に、第1の送信機から第3の目標領域へ送られる電磁波の反射を少なくとも一時的に第2の受信機へ向ける光学手段が設けられていることが、提案される。光学手段は、なるべく常に設けられ、それぞれ1つの送信機のみが動作するので、それぞれ1つの受信機がそれぞれ妨げられることなく第3の目標領域を検出する。それにより、例えば自動車において、走行方向において車両の右側および左側に設けられる送−受信機対により、走行方向において全正面範囲が検出可能である。  (もっと読む)
(もっと読む)
141 - 148 / 148
[ Back to top ]