
Fターム[5J084BA49]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 走査(スキャニング)に関するもの (754) | 1次元走査を行うもの (148)
Fターム[5J084BA49]に分類される特許
21 - 40 / 148
空間計測システム及び計測方法、並びに昇降機制御システム
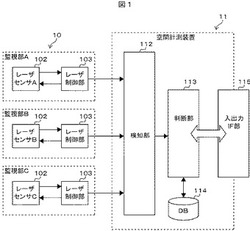
【課題】レーザセンサを用いて監視領域を計測して人や荷物(物体という)の存在状況を監視することで、監視領域へ物体が進入することができるかを判断する。
【解決手段】監視領域にレーザセンサにてレーザ光を照射して監視領域から測距データを得るレーザ監視装置と、特定する物体の三次元のサイズを大きさ毎に複数に区分して予め登録しておく物体認識データベースと、レーザ監視装置によって得られた監視領域の測距データについて、監視領域の背景データとの差分を取って、物体の三次元のデータを算出する検知部と、検知部で算出された物体データと、物体認識DBに登録された物体のサイズとを照合する判断部とを有し、判断部は、照合の結果、検知された物体の大きさが、物体認識DBに登録された特定物体サイズを超えていると判断した場合、その旨を示す情報を出力する。
(もっと読む)
物体認識装置

【課題】車載カメラのような他のセンサをさらに備えることなく低コストに、車載レーダが受信した反射点群のパターンから認識対象の物体を認識できるようにする。
【解決手段】レーザレーダ2が受信した反射点群のパターンの自車両1に対して反対方向に屈曲したL字状部分を分離処理部6により分離し、分離処理部6が分離したL字状部分が一部を構成する矩形に基づき、物体属性推定部8により認識対象の物体を認識する。
(もっと読む)
距離測定装置
【課題】本発明は、複数ビームを使用した3角測量方式による距離測定装置において、複数ビームの山部のプロファイルの非対称性による測定精度のバラツキを軽減した距離測定装置を提供する。
【解決手段】レーザビームを偏向して、複数点を時分割で同じ時間、且つ、同じ間隔で測定物表面を照射する偏向ビーム生成部13とレーザビームの反射光を1つの走査信号として、レーザビームの偏向タイミングと同期して受光するCCDカメラ部11と、偏向ビーム生成部とCCDカメラ部とを固定する検出基盤部12とを備える検出部1と、CCDカメラ部の出力を一定に制御するAGC21と、当該出力のビームプロファイルの形状と位置の変化から、測定物10表面と検出部1との距離を求める演算部22とを備える。
(もっと読む)
光学式距離計測装置、光学式距離計測装置の距離計測方法および距離計測用プログラム
【課題】低コストで製造することが可能な光学式距離計測装置を提供すること。
【解決手段】光学式距離計測装置1は、所定のパターンを断続的に投射するパターン投射装置2と、イメージセンサにより撮像を行う1台の撮像装置3と、制御装置4を備える。撮像装置3はパターン投射装置2が被写体に所定の投射パターンを投射した状態で撮像を行って第1画像データを取得するとともに、被写体に対して所定の投射パターンが投射されていない状態で撮像を行なって第2画像データを取得する。制御装置4は、第1画像メモリ13aに展開された第1画像データと第2画像メモリ13bに展開された第2画像データの差分から、所定の投射パターンの反射光のみを含む第3画像データを抽出し、第3画像データの画素間の自己相関係数R(x,y)を各画素P(x,y)について算出し、各画素P(x,y)の自己相関係数R(x,y)に基づいて、被写体までの距離を取得する。
(もっと読む)
レーザレーダ装置と出射調整方法
【課題】天候の急変にも即時に追随して人体に障害を与えることなく位置計測が可能なレーザレーダ装置を提供することが目的である。
【解決手段】天候の急変にも即時に追随して、対象物31での第一のレーザ光12Aおよび第二のレーザ光12Bの強度を所定の強度以下になるように、前記第一のレーザ光12Aおよび前記第二のレーザ光12Bの出射強度を調整するレーザレーダ装置1と出射調整方法を提供する。
(もっと読む)
移動体方向検知装置
【課題】移動体の方向を更に正確に2次元的に検知する移動体方向検知装置を提供する。
【解決手段】所定時間間隔をおいて周波数の異なる複数のパルスレーザ光を移動体に向けて照射し、移動体及びその背景からの反射光を受光する直線状のスリットに対して垂直方向に往復駆動されるマスクと、このマスクを通過した光を分光し、2次元に配列された複数の光センサ素子から成り、分光された光を受ける2次元センサと、スリットの行方向の各波長の光の強度累計値を求め、背景からの光から識別できるパルスレーザ光の反射光を検知し、マスクの往復駆動の方向と直角な方向の2次元センサにおける光センサ素子の列の受光強度の累積値によりパルスレーザ光の波長の強度の最大な列を求め、求められた強度最大列及び検知された反射光の最も強度の大きい累積値が得られるマスクの往復の位置及びこの往復の方向に対して垂直な2次元センサの位置により移動体の方向を検知する。
(もっと読む)
レーダ装置
【課題】漏れ光に起因するゴーストを検出してしまうことを抑制できるレーダ装置を提供する。
【解決手段】照射方位が−10〜10degの場合(照射方位に物体が存在する場合に2つのPDがその物体からの反射光を受光する)、セル1のみをオンしたときの受光強度E1およびセル2のみをオンしたときの受光強度E2のうち、いずれか一方のみがゼロであれば、ゴーストであると判定して受光結果を削除する。照射方位が−18〜−10、10〜18degの場合(照射方位に物体が存在する場合に1つのPDがその物体からの反射光を受光する)、E1=E2或いはE1<E2であれば、ゴーストであると判定して受光結果を削除する。
(もっと読む)
レーザ画像計測装置
【課題】環境変化に左右されない正確な測距値を取得可能なレーザ画像計測装置を得る。
【解決手段】レーザ光の発振時間と反射光の受光時間との時間差に基づき対象物までの距離を導出するために、基準となる変調信号Mを生成する基準信号発生部20と、変調信号Mにより変調されたレーザ光を出射するレーザ光送信部30と、レーザ光を走査して整形された送信ビームLを出射するレーザ光走査部40と、反射光を受信信号に変換する受信部50と、レーザ光走査部40内のレーザ光走査光学系5から基準固定距離に設置されて送信ビームLが照射される基準反射板6と、受信信号から基準反射板6および対象物の距離値Dzを導出する信号処理部60と、を備える。レーザ光走査部40および受信部50は、基準反射板6からの反射光を、対象物に対する距離測定と同一の光路で送受信する。信号処理部60は、基準反射板6の距離変動量ΔDzから、対象物の距離値を補正する。
(もっと読む)
レーザ測定装置
【課題】検出エリア内におけるレーザ光の実際の照射高さを容易に計測し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置100は、レーザレーダ装置1と検出用基準物体90とを備えている。検出用基準物体90の反射部は、所定の高さ方向における各位置が高さに応じた構造をなし、且つレーザ光L1が入射したときに、当該レーザ光L1が入射する高さに応じた内容の特定反射光を発するように構成されている。一方、レーザレーダ装置1は、回動反射機構40から照射されるレーザ光L1の走査エリア上に検出用基準物体90が配置されたときにこの検出用基準物体90からの特定反射光を検出している。そして、反射光の状態と高さ情報とを対応付ける対応データを参照して特定反射光の状態に対応する高さ情報を求め、検出用基準物体90におけるレーザ光の照射高さを計測している。
(もっと読む)
マルチライダーシステム
【課題】本発明の目的課題は、従来のライダーシステムよりも広範囲の計測を可能とし、更には乱気流の突入時に使用する機体の動揺低減用気流情報を短い周期で計測する方法並びにその機能を備えた装置を提供することにある。
【解決手段】本発明のマルチライダーシステムは、レーザ光を利用したドップラーライダー方式の光学式遠隔気流計測装置を相対位置固定の関係で二組以上装備し、各装置から同波長のレーザを放射させると共に散乱光を各装置で受信する機能を備え、不具合に対する冗長性を向上させるとともに、各々の計測信号の積分量を増加させることにより信号対雑音比を向上させるものとした。
(もっと読む)
距離測定装置および距離測定方法
【課題】測定対象の表面状態によって生じる計測誤差を低減することができる距離測定装置および距離測定方法を提供する。
【解決手段】可動プレート5は、直動案内ユニット8によって固定プレート9に対して摺動可能となっている。可動プレート5には、投光素子および受光素子が収容されたケーシング2が固定されている。固定プレート9には、出力軸13に偏心ローラ14が設けられた電動モータMが固定されている。電動モータMが駆動して偏心ローラ14が回転すると、伝達プレート15によって可動プレート5およびケーシング2が往復動する。電動モータMの駆動中に複数回、受光素子の受光結果を分析して平均値を出力する。
(もっと読む)
レーザレーダ装置
【課題】回動可能な偏向部をレーザ光投射時及び反射光検出時に兼用するレーザレーダ装置において、投光時のレーザ光の経路と受光時の反射光の経路を適切に確保することができ、且つ投光時のノイズ光の発生を効果的に抑制し得る構成を提供する。
【解決手段】レーザレーダ装置1は、レーザ光L1の投光経路上且つ反射光L2の受光経路上においてミラー30が設けられている。このミラー30には、凹面鏡41にて偏向された反射光L2をフォトダイオード20に向けて反射する第1反射部31と、レーザダイオード10からのレーザ光L1を凹面鏡41に向けて反射する第2反射部32とが形成され、第1反射部31の第1反射面31aと第2反射部32の第2反射面32aは、傾斜状態又は湾曲状態が異なるように構成されている。
(もっと読む)
レーザレーダ装置
【課題】レーザ光が透過板で反射して生じる内部反射光に起因する誤検出を効果的に防止し得るレーザレーダ装置を提供する。
【解決手段】レーザレーダ装置1では、ケース3内に回動反射機構40が収容されており、このケース3には、回動反射機構40に設けられた凹面鏡41からのレーザ光の走査経路上を囲う構成で透過板5が配置されている。更に、反射光が凹面鏡41からフォトダイオード20に至るまでに通る反射光経路を当該反射光経路の外から囲う構成で抑制カバー80が配置されている。そして、抑制カバー80は、凹面鏡41から空間に向けて偏向されたレーザ光の一部が透過板5にて反射する内部反射光を拡散反射させて低減するように構成されている。
(もっと読む)
レーザ測距装置
【課題】簡単な測定作業で任意の2点間距離を非接触で測定することができるレーザ測距装置を提供する。
【解決手段】レーザ測距装置1は、測定対象物10上の任意の2点A,B間距離LABを非接触で測定するレーザレーダ方式の測距装置である。レーザダイオード2はレーザ光を射出し、スキャナ3はレーザダイオード2からのレーザ光を偏向させて2点A,Bに対して順に照射する。フォトダイオード6は、2点A,Bで反射したレーザ光をそれぞれ受光して信号を出力する。演算制御部7は、フォトダイオード6からの出力信号とスキャナ3の動作情報を用いて2点A,B間距離LABを算出する。スキャナ3は、2点A,Bを含む直線上での1次元走査が可能であり、2点A,B間の線分ABをレーザ光の1次元走査により描画表示する。
(もっと読む)
レーザレーダ装置
【課題】集光効率を向上でき受光感度が良く、低コスト化及び小型化を実現できるレーザレーダ装置を提供する。
【解決手段】一方向の断面が楕円の一部からなる楕円面反射鏡14を光走査手段12と受光手段16の光路間に設置している。そして、楕円面反射鏡14に対象物から反射してくる反射光を導く固定鏡13が楕円面反射鏡14の一方の楕円焦点位置に設置されている。また、受光手段16が楕円面反射鏡14の他方の楕円焦点位置に設置されている。このため、楕円面反射鏡14を反射した全ての反射光が楕円面反射鏡14の楕円焦点位置に集光する。
(もっと読む)
レーザレーダシステム及び移動体
【課題】簡便な処理で、小型なレーザレーダシステムを提供できる。
【解決手段】スキャンモードでは電気光学結晶を用いた光偏向素子21によって広範囲な偏向範囲で走査する。対象物からの反射光を受光素子31によって受光して対象物を捕捉する。時間計測部220によって発光して受光するまでの時間を計測し、この時間に基づいて距離・差速計算部231によって対象物までの距離や差速が計算される。一方、スキャンモードから切り替わったトラッキングモードでは、光偏向素子21によってスキャンモード時の偏向角より微小な偏向角で偏向走査する。対象物からの複数の反射光を受光素子によって受光して対象物を追尾する。
(もっと読む)
レーザ距離測定装置
【課題】従来のレーザ距離測定装置では、測定性能や装置構造のさらなる改善が望まれていた。
【解決手段】送信レーザ光LTと目標で反射した受信レーザ光LRの時間的なずれに基づいて目標までの距離を測定するレーザ距離測定装置F1であって、送信レーザ光LTの発光部1と、受信レーザ光LRの受光部2と、垂直軸回りに回転駆動される回転体3を備えると共に、回転体3に、回転しながら発光部1からの送信レーザ光LTを外部の所定角度範囲に走査する送信光学系4と、回転しながら外部の所定角度範囲からの受信レーザ光LRを受光部2に導く受信光学系5を設けたことにより、一つの回転体3に、送信光学系4及び受信光学系5をコンパクトに搭載すると共に、全方位分の送信レーザ光LTを有効に使用するようにして、走査性能や測定性能のさらなる向上、及び装置構造のさらなる小型軽量化を実現した。
(もっと読む)
位置計測方法、位置計測システム、及びプログラム
【課題】トータルステーションと比して簡易な装置を用いて、リアルタイムで被計測物の特徴点の位置を計測できる位置計測方法、及び位置計測システムを提供する。
【解決手段】円柱体であるターゲット30の中心位置を計測する位置計測方法であって、レーザ光をターゲット30上で走査してターゲット30上の複数の計測点までの距離を計測するLRF20から、ターゲット30上における複数の計測点の位置情報を取得するステップと、ターゲット30上における複数の計測点の位置情報と、既知情報であるターゲット30の円周面30B上の円弧部及び中心位置の情報とに基づいて、ターゲット30の中心位置を推定するステップと、を備える。
(もっと読む)
車両の周辺監視装置
【課題】レーダデータと赤外線カメラデータの同期ずれを補正する。
【解決手段】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、を備える車両周辺監視装置において、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して当該所定領域内の前記物体を特定する手段とを備え、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、を有する。
(もっと読む)
移動体
【課題】外部に補正用の基準部材を設置することなく、物体の位置を測定するセンサの取り付け角度ずれに起因する誤差を補正することが可能な移動体を提供する。
【解決手段】車体11に搭載され、走行上計測を必要とする物体が存在する第1の領域及びその他の第2の領域を計測領域とし、物体の位置を計測するセンサ12と、車体11に設けられ、第2の領域の予め決められた位置に配置された基準部材13と、センサ12が計測した基準部材13の位置と予め決められた位置とに基づいて、センサ12の取り付け角度ずれに起因する誤差を補正する補正部22を有し、車体11の移動を制御する制御装置14とを備える。
(もっと読む)
21 - 40 / 148
[ Back to top ]