
Fターム[5J084CA16]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 受信系に関するもの (289)
Fターム[5J084CA16]の下位に属するFターム
Fターム[5J084CA16]に分類される特許
1 - 20 / 29
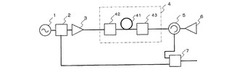
ドップラーライダ装置
【課題】ファイバ増幅器を備えたドップラーライダ装置では、光ファイバ増幅器の内部での偏波変動の影響を最小化するため、偏波制御をおこなっていた。
【解決手段】レーザ光を発振する基準光源1からのレーザ光を光分波回路2で送信信号光と局部発振光に分波し、光分波回路2で分波した送信信号光を偏波保持特性を有した光ファイバ増幅器4で増幅して大気中に発射する。大気中での散乱光を受信光として受光し、この受信光と光分波回路2で分波された局部発振光とを光受信回路7で合波し、受信光の局部発振光からの変動成分を電気信号として取り出すことにより、偏波制御を必要としないドップラーライダ装置を得る。
(もっと読む)
距離センサ及び距離画像センサ

【課題】電荷発生領域から電荷収集領域に転送される電荷の移動速度が高速になる距離センサ及び距離画像センサを提供する。
【解決手段】画像距離センサは、二次元状に配置された複数のユニット(画素P)からなる撮像領域を半導体基板上に備え、ユニットから出力される電荷量に基づいて、距離画像を得る距離画像センサにおいて、1つのユニットは、入射光に応じて電荷が発生する電荷発生領域(転送電極5の外側の領域)と、空間的に離間して配置され、電荷発生領域からの電荷を収集する半導体領域と、半導体領域の周囲に設けられ、電荷転送信号が与えられ、半導体領域を囲む転送電極5と、電荷発生領域から半導体領域へ向かうポテンシャル勾配を急にするポテンシャル調整部6と、を備える。
(もっと読む)
光測距装置
【課題】バイアス電圧を印加することにより増倍作用を持つ受光素子を備えた光測距装置において、素子温度の変化に対して個々の受光素子の増倍率を精度良く一定に保持できるようにする。
【解決手段】光測距装置1は、2次元走査ミラー2、レーザ投光部3、アバランシェフォトダイオードAPDからなる受光素子4bを備えたレーザ受光部4、投受光分離器5を含んで構成される。また、レーザ光走査領域SAの下端に沿って走査領域SAに重なるように、短冊状の反射板21をカバーガラス7に取り付けてある。そして、反射板21からの反射光を受光したときの受光素子4bの出力が目標値(所定の設定値)になるように、受光素子4bに印加するバイアス電圧を変更する。
(もっと読む)
捜索セット
【課題】載置場所を円滑に探し出すことができる捜索セットを提供すること。
【解決手段】本発明では、使用者が捜索具を用いて載置場所を捜し出すための捜索セットにおいて、発信部と受信部とを有する捜索具と、発信部と受信部と制御部とを収容したケーシングとからなり、ケーシングは、捜索具から発せられた信号を受信する受信部と、捜索具から発せられた信号よりも到達距離が短い微弱な信号を発信する発信部と、受信部で信号を受信した場合に発信部から所定の信号を発信するように制御する制御部とを収容し、捜索具は、所定の信号を発信する発信部と、ケーシングに収容した発信部から発せられた信号を受信する受信部と、受信部で信号を受信した場合に報知をする報知部とを有することにした。
(もっと読む)
人物動作検出装置、遊具装置、人物動作検出方法、ゲーム方法、制御プログラムおよび可読記録媒体
【課題】多数の空間領域を面状に演算処理する場合に、高いフレームレートでも演算量が膨大にならず、撮像範囲における人物動作の方向と距離の変化量を高精度に検出する。
【解決手段】TOF式距離画像センサ31からの距離情報に基づいて人物の動作情報を検出する高速人物動作検知制御手段4は、TOF式距離画像センサ31からの距離情報に基づいて時系列に複数の距離フレームを生成する距離フレーム生成部431と、少なくとも2つの距離フレームに基づいて、人物に距離変化のない距離情報である距離平衡フレーム(背景画像フレーム)を生成する距離平衡フレーム生成部432と、複数の距離フレームについてそれぞれ距離平衡フレームとのフレーム差分を演算し、フレーム差分から人物の動作情報として人物の距離の変化量と変化方向を算出するフレーム差分演算部46とを有している。
(もっと読む)
光波距離計
【課題】位相差方式の光波距離計による遠距離測定の測定誤差を小さくする。
【解決手段】複数の変調周波数(F1、F2、F3)を重ね合わせる周波数重畳回路(3)と、周波数重畳回路で重ね合わされた複数の変調周波数で変調された光を出射する発光素子(11)と、発光素子から出射された光を受光する受光素子(30)と、受光素子に接続される複数の周波数変換器(32,35,38)とを備えた光波距離計において、前記周波数重畳回路が、最も低い変調周波数(F3)以外の変調周波数が入力されるAND回路と、AND回路の出力及び最も低い変調周波数が入力されるXOR回路とから構成される。そして、最も低い周波数の局部発振信号が、2番目に低い変調周波数(F2)と最も低い変調周波数(F3)との差又は和といくらか異なる周波数(F2−F3+ΔF3)とされる。
(もっと読む)
張力・速度計測装置および方法
【課題】ウェブの種類によらずにウェブの張力を高精度に計測し、同時にウェブの速度を安価に計測する。
【解決手段】張力・速度計測装置は、搬送装置によって搬送中のウェブ11にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1からのレーザ光とウェブ11からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2と電流−電圧変換増幅部5とフィルタ部6と、フィルタ部6の出力に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7が計測した個々の周期の基準周期に対する変化に基づいてウェブ11の速度および張力を算出する演算部8とを備える。
(もっと読む)
光走査型光電スイッチ
【課題】設定した検出感度を維持する制御を容易化する。
【解決手段】光走査型光電スイッチ(1)は、基準対象物である反射率の異なる第1、第2の反射面(73,74)を内蔵する。第1、第2の反射面(73,74)は走査ミラー(14)の回転において測定の無効範囲に配設され、測定領域での走査で用いる投光経路、受光経路、レーザ光源(LD)、受光素子(22)が共用される。白の第1反射面(74)の受光強度がメモリ(147)の「基準受光強度RE(白)」よりも小さいときには(S202)、投光駆動部(150)を制御して投光強度を増加させる(S203)。
(もっと読む)
距離測定装置及び距離測定方法
【課題】測定装置内部の遅延回路の変動を相殺し、高精度でかつ高速測定が可能な距離測定装置及び方法を実現する。
【解決手段】パルス的に発光する光源部10から、第1基準光r1、第2基準光r2、測定送信光mtを分岐し、光学的変化が略生じない第1参照光路R1を伝播させた第1基準光r1、光学的遅延発生部50が挿入された第2参照光路を伝播した第2基準光r2、測定送信光を測定対象物160に照射して反射して戻ってきた測定受信光mr間の検出時間差を測定することによって測定対象物160との距離を測定する装置及び方法であって、測定受信光mrと第1基準光r1が時間的に分離している場合は、両者の検出時間差から距離を算出し、測定受信光mrと第1基準光r1が時間的に分離していない場合は、第1基準光r1と第2基準光r2の検出時間差Tdと、測定受信光mrと第2基準光r2の検出時間差Td’から距離Lを算出する。
(もっと読む)
レーザトラッカ
【課題】簡単な構成で要求される性能を維持しつつ、測定が中断しても高精度な測定を行うことができ、使い勝手の良いレーザトラッカを提供する。
【解決手段】本体からターゲット106迄の絶対距離を測定する光コム距離計201と、モータ113、115を用いてレーザ光3の方向を変えることのできる2軸の回転機構と、ターゲットと本体との相対的な角度を測定する2軸分の角度測定手段114、116と、光コム距離計が出力する絶対距離のデータと角度測定手段が出力する2軸分の角度データから、ターゲットの空間座標を算出するデータ処理装置110と、ターゲットに入射するレーザ光の光軸と直角方向にターゲットが移動すると、この移動量と移動する方向に応じた信号を出力する光位置検出手段109と、光位置検出手段から出力された信号を用いて、移動量がゼロになるように2軸の回転機構を制御する制御手段111、112とを備える。
(もっと読む)
視軸指向装置
【課題】この発明は、機軸方向を含む広範囲において、空間安定性能を有し、小型で、かつ大きい受信開口径を有する視軸指向装置を得る。
【解決手段】クーデ光学系を構成する第1乃至第4ミラー7〜10が、レーザ光Lを放射するとともに、目標物からの反射光を入射する第1レンズ11と、第1レンズ11に入射した目標物からの反射光をレーザ光送受信部4に集光する第2レンズ13との間に配設され、第1レンズ11と協働してアフォーカル光学系を構成する第3レンズ12が第3ミラー9と第4ミラー10との間に配設されている。第1ミラー7が第1ミラー回転手段15により第1ミラー回転軸MAまわりに回転可能に、第1レンズ11が第1レンズ回転手段16により第1ミラー7の回転動作に連動して第1ミラー回転軸MAまわりに回転可能に、第1ミラー7と第1レンズ11とがジンバル装置17により一体にジンバル回転軸GAまわりに回転可能になっている。
(もっと読む)
レーダ装置
【課題】従来の測距処理は処理対象となる受信信号での包絡線算出にフーリエ変換を行う場合、逆フーリエ変換も行う必要が生じ、演算量が多い。
【解決手段】空間に放射され、空間の物体で反射した波動を受信し、放射から受信までの時間で物体の距離を計測するレーダ装置であり、受信手段が受信信号に周波数変換して生成した中間周波受信信号から、中間周波信号最大値検出手段がその最大値を検出し、中間周波信号抽出手段でこの最大値の時刻を含む所定時間区間で抽出した中間周波信号から、2信号抽出手段が予め設定された時間間隔だけ離れた2つの中間周波受信信号値を抽出し、包絡線算出手段が、2信号抽出手段で抽出された2つの受信信号値から中間周波受信信号の包絡線を算出する。
(もっと読む)
距離測定センサ及びそれを備えた立体カラーイメージセンサ
【課題】基板に垂直に形成されたフォトゲートを備えて光受光領域を拡張した距離測定センサ及びそれを備える立体カラーイメージセンサを提供する。
【解決手段】基板に第1不純物をドーピングして形成され、光を受けて光電荷を発生する光電変換領域と、前記基板に第2不純物をドーピングし、前記光電変換領域を挟んで互いに対向するように離隔して形成され、前記光電荷を集め保存する第1及び第2電荷保存領域と、前記第1及び第2電荷保存領域にそれぞれ対応して前記基板に所定の深さで形成される第1及び第2トレンチと、前記第1及び第2トレンチ内にそれぞれ形成される第1及び第2垂直フォトゲートとを有する。
(もっと読む)
移動体配置計測システム及び移動体搭載システム
【課題】簡易に移動体の配置を計測することが可能な移動体配置計測システム及び移動体搭載システムを提供する。
【解決手段】自律走行ロボット400に配置された通信装置100が全外周にわたって問い合わせ信号に対応する光を発光すると、当該光を受光した信号発生装置300は、自身の固体番号を含んだ識別信号に対応する光を発光する。そして、この光は、通信装置100によって受光され、当該通信装置100に接続された計測装置200は、問い合わせ信号に対応する光と、識別信号に対応する光のそれぞれの初受光の時間と、識別信号に対応する光の到来方向とに基づいて、自律走行ロボット400の位置及び方位や、自律走行ロボット400からの信号発生装置300の方向を計測する。
(もっと読む)
測距双眼鏡
【課題】対象物までの距離を測定可能で、焦点調節及び視度調節等の双眼鏡の基本的な機能を損なわずに小型化した測距双眼鏡を提供すること。
【解決手段】接眼レンズ、対物レンズ並びに第1プリズム及び第2プリズムから成る正立プリズムを有する一対の光学系と、ビーム分割面を有し、かつ前記第1プリズム及び第2プリズムの間に配置されるビームスプリッタと、対象物にレーザーを放射する発光部と、対象物から反射したレーザーが入射する受光部と、レーザーが前記受光部に入射することにより対象物までの距離を算出する演算手段と、前記演算手段で算出された結果を表示する測定結果表示手段と、前記一対の光学系、前記ビームスプリッタ、前記発光部、前記受光部、前記演算手段及び前記測定結果表示手段を内蔵する筐体とを備えることを特徴とする測距双眼鏡。
(もっと読む)
測距装置
【課題】 短い検出時間で正確且つ簡単に対象物までの距離を測定可能な測距装置を提供する。
【解決手段】 転送時において、外光の強度が高いほど、転送電圧の大きさを小さくすると、障壁高さが高くなり、より多くの電荷量のキャリアが、第1及び第2ポテンシャル井戸φCD1、φCD2内に残留する。単位期間は、外光の強度に依存しないで設定される。外光の強度が高いほど、多くのキャリアが残留し、最終的に読み出されるキャリアから除去される。外光が強ければ、単位期間当りの転送回数が増加し、第1及び第2ポテンシャル井戸φCD1、φCD2内に蓄積されるキャリアが飽和する前に、転送が行われる。外光が弱ければ、単位期間当りの転送回数が減少し、余分な転送を行わないことで、単位時間当たりの蓄積電荷量を増加させ、短い検出時間において検出精度を向上させることができる。
(もっと読む)
受光装置および空間情報の検出装置
【課題】不要電荷の量を着目する受光光量に精度よく対応付けることを可能にする。
【解決手段】受光強度に応じた量の電荷を生成する光電変換部D1と、障壁制御電極24を半導体表面に備える障壁形成領域Dbおよび光電変換部D1で生成された生成電荷の一部を障壁形成領域Daに形成するポテンシャル障壁の高さに応じて不要電荷として秤量する電荷分離領域Daを備える電荷秤量部D2と、生成電荷のうち電荷秤量部D2で秤量された不要電荷を除く残留電荷が取り出される電荷蓄積部D4と、保持している電荷量に応じて決まる電圧を障壁制御電極24に印加し電荷秤量部D2で秤量する不要電荷の量を決定する電荷保持部D4とを備える。電荷保持部D4に電荷を投入した後に、電荷秤量部D2で不要電荷を秤量した後の残留電荷を電荷保持部D4に引き渡す期間を設ける。
(もっと読む)
光電センサ
【課題】様々な生産ラインに応じた被検出物の検出を可能にしつつも誤判定を抑制し得る設定を自動的に行うことができる光電センサを提供する。
【解決手段】周期可変手段を構成する設定部31及び信号生成部32により投光素子11の投光周期を可変しながら、判別手段としての判別部35によって比較部33から出力されるハイレベルの受光パルス信号の連続回数と評価回数との比較結果に基づいてワークWの検出が可能な周期が判別され、投光周期が判別部35にて判別された周期に設定される。
(もっと読む)
光レーダ装置
【課題】測定対象物が移動体である場合であれ、該移動体への追従性の低下を抑えながら、分解能を向上させることができる光レーダ装置を提供すること。
【解決手段】光レーダ装置の制御回路は、レーザ光源から出射されるパルス光の照射周波数fを、一走査周期当たりの照射パルス数が自然数にならないように設定する。このため、連続する走査周期Tの間で各走査周期Tにおけるパルス光の出射タイミングに、パルス光の照射周期tよりも短い時間Δt(本実施の形態ではΔt=t・1/2)分のずれが生じる。したがって、先の走査における隣り合うパルス光の照射位置p0〜p6の間に、その走査に連続する次の走査におけるパルス光の照射位置p0’〜p6’が設定され、分解能が擬似的に向上する。
(もっと読む)
距離変化観測装置
【課題】光ビームを用いた距離変化観測装置において、簡単な構成により、装置設定が容易で観測環境の変化に影響されずに観測を継続可能とすると共に、距離の誤測定を防止して信頼性の高い観測を実現可能とする。
【解決手段】距離変化観測装置1は、距離測定に用いる光ビームを投光する投光部2と、投光部2からの光ビームL0を広がり角θを調整した照射光L1とする投光光学部3と、投光光学部3からの照射光L1を反射するターゲットTGからの反射光L2を受光して受光信号を出力する受光部4と、投光部2による光ビームL0の投光時刻から受光部4による受光時刻までの経過時間に基づいて投光部2からターゲットTGまでの距離Dを2点P1,P2間の距離Dとして算出する距離計算部5と、を備えている。受光部4は、投光時刻からの経過時間が予め設定した時間範囲内となる場合に限って受光時刻を決定するための受光信号を出力する。
(もっと読む)
1 - 20 / 29
[ Back to top ]