
Fターム[5J084CA57]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | ホールド回路 (28)
Fターム[5J084CA57]に分類される特許
1 - 20 / 28
空間情報検出装置
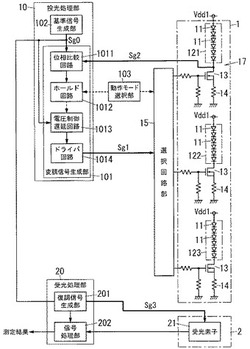
【課題】複数個の発光素子を用いて強度変調光を投光し、かつ投光と受光とのタイミング調整の期間を備える構成で、タイミング調整の期間における消費電力を抑制する。
【解決手段】発光素子11は群121,122,123に分けられ、群121,122,123ごとに設けた通電制御素子13により光出力が制御される。動作モード選択部103は、基準信号Sg0に対する検出信号Sg2の時間差を計測する校正モードと、発光素子11から強度変調光を投光してから受光素子21が受光するまでの時間を計測する測定モードとを選択する。測定モードでは、検出信号Sg2の基準信号Sg0に対する時間差が規定値に維持されるように電圧制御遅延回路1013による遅延時間が設定される。経路選択部15は、校正モードが選択されているときに、発光素子11のうちの1つの群121に対応する通電制御素子13にのみ通電する。
(もっと読む)
距離測定装置およびそれを備えた輸送機器

【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
レーザレーダ装置
【課題】レーザレーダ装置以外の他の距離測定装置を備えずに、高い距離測定精度と広い測定可能距離間隔を有するレーザレーダ装置を提供する。
【解決手段】 レーザ光を目標に向けて発振し、目標からの反射光を受信して受信信号に変換する光送受信部10と、あらかじめ設定された測定可能時間間隔に基づき、光送受信部10によるレーザ光の発振から反射光の受信までの時間を測定することでレーザ光の照射点までの距離を示す距離信号を算出すると共に、レーザ光の照射点からのレーザ光の反射光強度を示す強度信号を算出する距離強度算出部20と、距離強度算出部20により算出された距離信号及び強度信号に基づきあらかじめ設定された測定可能時間間隔より狭い測定可能時間間隔を設定する信号処理部30とを備え、距離強度算出部20は信号処理部30により設定された狭い測定可能時間間隔に基づいて距離信号を算出する。
(もっと読む)
時間振幅変換装置
【課題】複数の時間振幅変換回路を有する場合でも、素子ばらつきの影響を小さくすることのできる時間振幅変換装置を得る。
【解決手段】電圧電流変換素子3a,3bは、増幅器11a,11bの出力電圧に対応した電流を出力する。校正時は、時間振幅変換回路20a,20bに対して、スイッチ2a,2b及びスイッチ5a,5bを切り替えることで、各々基準電流源1を接続し、電圧電流変換素子3a,3bの出力電流値を基準電流源1の電流値に収束させた際の電圧値を容量素子4a,4bの値として記憶する。
(もっと読む)
固体撮像装置
【課題】光電変換素子で発生した光電子の転送の際に、光電変換素子に残留する光電子数を軽減させるとともに、光電子の転送の高速化を図る固体撮像装置を提供する。
【解決手段】光を検知して光電子を発生する光電変換素子を有する単位画素と、前記単位画素を駆動する画素駆動部と、を備え、前記光電変換素子は、フォトゲート構造により形成され、前記画素駆動部は、3値の電圧のうち、いずれかの電圧を前記光電変換素子のフォトゲートに印加させることで、前記光電子の発生、転送を行い、前記3値の電圧は、少なくとも、第1電圧と、前記第1電圧より高い第2電圧と、前記第1電圧より大きく且つ前記第2電圧より小さい第3電圧とを有する。
(もっと読む)
距離センサ
【課題】距離センサにおいて、簡単な構成により、処理する信号の周波数帯域を抑えることによる低コスト化と測定精度の向上または維持を図る。
【解決手段】距離センサ1は、第1、第2の周波数の信号を生成する第1、第2のシンセサイザ11,12と、第1の周波数の信号を第2の周波数でサンプリングしてスタート信号を出力するサンプルホールド回路3と、第1の周波数でパルス化した信号波を送信する投光器4と、反射して戻ってくる信号波を受信して受信信号を出力する受光器5と、受信信号を第2の周波数でサンプルホールドした信号に基づいてストップ信号を生成して出力する比較判断回路6と、スタート信号の出力からストップ信号の出力までの経過時間に基づいて対象物Mまでの距離を演算する計数演算器7とを備える。比較判断回路6は、等価サンプリングとサンプルホールドとにより、システムの低速動作が可能とされる。
(もっと読む)
時間計測回路
【課題】TAC方式を使用する時間計測回路、またはTAC方式とパルスカウント方式を組み合わせた時間計測回路において、測定精度を向上させるとともに、デッドタイムのない回路構成を提供する。
【解決手段】入力信号Viの振幅の最大値を検出してトリガTRGを出力するピーク検出回路5と、測定開始信号Vgに応答して動作する3個以上の複数のアナログ信号発生部1〜4と、アナログ信号発生部1〜4の動作タイミングを制御する制御部6と、トリガTRGの出力時点におけるアナログ信号発生部の少なくとも1つの出力電圧を用いて、測定開始信号Vgの出力時刻を起点としたトリガTRGの出力時刻を算定する算定部7とを備えている。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
測距システム及び測距方法
【課題】測定精度を向上することが可能な測距システム及び測距方法を提供する。
【解決手段】環境光Lsのみが入射する期間P1、P2において第1スイッチング素子60a、60bのゲートG11、G12を開いて電荷量Q1、Q2を求める。環境光Ls及び反射光Lrが入射する期間P3、P4(それぞれ期間P1、P2と同じ長さである。)において第1スイッチング素子60c、60dのゲートG13、G14を開いて電荷量Q3、Q4を求める。差Q4−Q2と差Q3−Q1との比と、往復期間ΔP(パルス光Lpが測距システム10と対象物Wの間を往復する期間)と期間P3との比が等しいことを利用して往復期間ΔPを演算する。往復期間ΔPと光速cに基づき、測距システム10と対象物Wとの距離Dを求める。
(もっと読む)
固体撮像装置及び距離画像測定装置
【課題】 簡易な構成で距離画像測定が可能な固体撮像装置及び距離画像測定装置を提供する。
【解決手段】 一対の第1ゲート電極IGR,IGLが、光感応領域SAと一対の第1蓄積領域AR,ALとの間のポテンシャルφTX1,φTX2が交互に傾斜するよう半導体基板100上に設けられている。一対の第2ゲート電極IGR,IGLは、第1蓄積領域AR,ALと第2蓄積領域FDR,FDLとの間にそれぞれ介在する第1ポテンシャル障壁φBGの高さを制御するよう半導体基板100上に設けられており、光検出素子によって検出される背景光の出力が高いほどキャリアに対する第1ポテンシャル障壁φBGの高さを増加させる。
(もっと読む)
測距センサ及び測距装置
【課題】 正確な測距を行うことが可能な測距センサ及び測距装置を提供する。
【解決手段】 光感応領域1G内でイオン化された不純物によるポテンシャルφPGと、第1及び第2半導体領域FD1、FD2内でイオン化された不純物によるポテンシャルφFD1,φFD2の差は、光感応領域と第1及び第2半導体領域で導電型が異なるので、これらの導電型が同一の場合よりも、大きくなる。このようにポテンシャルの差がある状態で、光感応領域1Gの導電型を半導体基板1A,1A’と同一のP型とし、その不純物濃度を低下させると、光感応領域1Gにおけるポテンシャルの横方向分布が、一方向のみに傾斜しやすくなる。光感応領域1G内で発生したキャリアが第1半導体領域FD1及び第2半導体領域FD2内に確実に流れ込みやすくなり、光感応領域1G内におけるキャリアの残留を抑制することができる。
(もっと読む)
測距装置
【課題】 短い検出時間で正確且つ簡単に対象物までの距離を測定可能な測距装置を提供する。
【解決手段】 転送時において、外光の強度が高いほど、転送電圧の大きさを小さくすると、障壁高さが高くなり、より多くの電荷量のキャリアが、第1及び第2ポテンシャル井戸φCD1、φCD2内に残留する。単位期間は、外光の強度に依存しないで設定される。外光の強度が高いほど、多くのキャリアが残留し、最終的に読み出されるキャリアから除去される。外光が強ければ、単位期間当りの転送回数が増加し、第1及び第2ポテンシャル井戸φCD1、φCD2内に蓄積されるキャリアが飽和する前に、転送が行われる。外光が弱ければ、単位期間当りの転送回数が減少し、余分な転送を行わないことで、単位時間当たりの蓄積電荷量を増加させ、短い検出時間において検出精度を向上させることができる。
(もっと読む)
距離計測装置および距離計測方法
【課題】簡単な構成により、パルス状電磁波の投射時刻と投射されたパルス状電磁波の物体からの反射波の受波時刻とを高精度に決定して物体までの距離を高精度に信頼性高く測定できる距離測定装置および距離計測方法を実現する。
【解決手段】距離計測装置1の時刻検出部2は、送受波部10からの参照波Sまたは反射波Rの受信信号を2つに分岐する分岐手段23と、分岐された一方の受信信号を減衰する振幅調整手段24と、他方の受信信号を遅延する遅延手段25と、減衰または遅延された2つの信号の振幅を比較して両信号の信号波形の交点に対応する時刻である交点時刻を検出する比較演算手段26とを備え、その交点時刻により投射時刻と受波時刻とを決定する。振幅調整手段24と遅延手段25とは、2つの信号の信号波形の交点がいずれか一方の信号波形の極大値の位置となるように処理する。
(もっと読む)
光波距離測定方法、距離測定プログラム及び距離測定装置
【課題】同時に多数の測定対象物について、多数回の距離測定を可能とし、又近接した測定対象物についても距離測定を可能とする。
【解決手段】所定の広がり角を有するパルスレーザ光線を発する光源部6と、1以上の測定対象物11からの反射光36′を受光する受光部9と、受光制御回路を有し、前記受光部からの最初の受光信号を基に前記測定対象物についての測定データを取得する測距部32と、前記測距部は前記受光部が1つのパルスレーザ光線で2以上の反射光を受光した場合、1つのパルスレーザ光線で最初に得られる受光信号を検出し、前記制御演算部は少なくとも1回検出した後は検出した受光信号について検出を制限し、制限後は制限した以外の発光後最初に得られる受光信号を検出可能とする様前記受光制御回路を制御し、発光パルス毎に弁別して受光信号を検出し、弁別した受光信号に基づき複数の測定対象物迄の距離を個別に測定する様構成した。
(もっと読む)
測距装置
【課題】高精度に目標との距離を得ることができる測距装置を提供する。
【解決手段】光を受光し、光の強さに応じたレベルの信号を出力する受光手段と、受光手段に対し直接発光する第1の発光手段と、受光手段が目標からの反射光を受光可能なように、目標に対し発光する第2の発光手段と、受光手段が受光したタイミングを、受光手段が出力した信号に基づいて取得すると共に、第1の発光手段及び第2の発光手段の発光の開始及び停止の制御を行う制御手段と、を有し、制御手段は、第1の発光手段を所定時間発光させることにより受光手段が受光した第1のタイミングを取得し、第1の発光手段の発光を停止させた後に第2の発光手段を発光させることによる反射光を受光手段が受光した第2のタイミングを取得し、第1のタイミング、第2のタイミング及び所定時間に基づいて目標との距離を算出する。
(もっと読む)
レーダ装置
【課題】自車両、及び先行車両の走行状況に適した相対速度のフィルタの時定数を設定する。
【解決手段】カーブ付近等の自車両が加減速する可能性の高い道路を通過する場合に応答要求度を設定し(ステップS310)、相対速度の絶対値に応じて応答要求度を設定し(ステップS320)、車間時間と設定車間時間との比に応じて応答要求度を設定し(ステップS330)、設定車間時間が変更される場合に応答要求度を設定し(ステップS340)、車間距離制御のターゲットとすべき先行車両が変更される場合に応答要求度を設定する(ステップS350)。このように、自車両、又は先行車両が加減速する可能性を判断することで、自車両、及び先行車両の走行状況に適した相対速度のフィルタの時定数を設定することができる。
(もっと読む)
光学式測距装置
【課題】背景光が強い環境下であり信号光量が微小な場合でも精度の高い測距を行う。
【解決手段】第1差動演算部30は第1蓄積素子23からのAch信号と第2蓄積素子24からのBch信号との差動演算を行う。第2差動演算部32は第3蓄積素子28からのCch信号と第4蓄積素子29からのDch信号との差動演算を行う。こうして、背景光等のノイズ成分を適宜除去して距離計算に必要な信号成分のみを抽出する。また、N個の第1,第2受光素子20,25とN個の第1,第2差動演算部30,32とを設けてN個の第1,第2蓄積差動信号を得、第1,第2加算部31,33で上記N個の第1,第2蓄積差動信号を加算して第1,第2加算信号を得るようにしている。したがって、個々の受光素子20,25で検出される受光信号は小さくとも高速応答が可能な時間内に測距に必要な量の電荷信号を蓄積することができ、測定対象物15が動いていても正確な距離測定を行うことができる。
(もっと読む)
光測距装置
【課題】受光パルスの波高値に影響されることなく高精度な測距が可能な光測距装置を提供する。
【解決手段】受光パルスをフィルタリングした後の信号のゼロクロス点を受光時刻として光パルスの投光時刻から受光時刻までの時間を計測して測距対象物1までの距離を算出する第1測距部5と、受光パルスレベルが閾値に到達した時点を受光時刻として光パルスの投光時刻から受光時刻までの時間を計測して測距対象物1までの距離を算出する第2測距部6と、波高値検出部7の検出波高値に基づいて検出波高値が低レベル領域のときは第1測距部5の算出距離を測距対象物1までの距離として選択するよう、高レベル領域のときは第2測距部6の算出距離を測距対象物1までの距離として選択するよう測距値選択部9に選択指令を出力する波高値判別部8とを備える
(もっと読む)
パルス信号の波高値検出回路
【課題】入力するパルス信号に含まれるオフセット分(直流分)を除去して積分ピーク値が波高値に比例するようにして波高値の検出精度を高めたパルス信号の波高値検出回路を提供する。
【解決手段】入力するパルス信号を微分する微分回路2と、微分回路2から出力される微分信号を積分する積分回路3と、積分回路3から出力される積分信号のピーク値をピークホールドするピークホールド回路4とを備え、微分回路2の時定数を、微分信号のゼロクロス点が1つだけ存在するように設定して積分回路3の出力が最初のピーク値から増大しないようにし、ピークホールド回路4のホールド値を入力パルス信号の波高値として検出する構成とした。
(もっと読む)
測量装置及び測量方法
【課題】 測定対象物に光を照射し、その反射光を受光して遅延時間や距離を測定するに際し、より一層、測定誤差を微小にする測量装置及び測量方法を提供する。
【解決手段】 受光部9により基準パルス光r及び測定パルス光o1を受光信号として受光し、受光信号r、o1からダンピング信号S3Uを形成し、ダンピング信号S3UのゼロクロスポイントQ0近傍における微小レベルの信号の増幅率を高く増幅し、増幅した信号を用いて、タイミング信号号r’、o1’を形成する。これにより、測定誤差を微小にできる。
(もっと読む)
1 - 20 / 28
[ Back to top ]