
Fターム[5J084CA71]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | サーボ (60)
Fターム[5J084CA71]に分類される特許
21 - 40 / 60
目標捕捉追尾装置
【課題】2次元画像の視野内に存在する目標の3次元形状を取得する際の視軸設定及び対象視野の自由度を向上させ、効率よく目標を追尾する目標捕捉追尾装置を得る。
【解決手段】2次元画像情報を取得するセンサを有する赤外線撮像部と、3次元形状情報を取得するセンサを有するレーザレーダ部とを分離した構成とし、2次元画像情報の視軸及び視野と、3次元形状情報を取得する方向及びその走査範囲とをそれぞれ独立に設定可能にする。そして、赤外線撮像部の視軸は自身の移動方向に一致させつつ、レーザレーダ部の視軸は、目標を捕捉する際には、赤外線撮像部の視軸の方向に一致させるとともに、赤外線撮像部の視野の方位角範囲に一軸走査してその3次元形状情報を取得する。また、目標を追尾する際には、目標の方向に視軸を設定し、これを基準とする限定された範囲を一軸走査して目標の3次元形状を取得する。
(もっと読む)
周囲を光学的に走査および測定する装置
レーザスキャナ10として設計される、周囲を光学的に走査および測定する装置であって、走査に対してレーザスキャナ10の静止基準系を規定する中心C10およびこの走査の中心Ciと、発光ビーム18を放射する発光器17と、レーザスキャナ10の周囲の空間内で物体Oによって反射され、または他の形で散乱された受光ビーム20を受け取る受光器21と、走査の多数の測定点Xに対して、少なくとも中心Ciと物体Oの間の距離dを判定する制御および評価ユニット22とを有し、異なる中心C1、C2、...を有するいくつかの走査で周辺空間を測定するレーザスキャナ10が、中心C1、C2、...間を全体として動くことができるデバイスにおいて、異なる中心C1、C2、...間で全体としてレーザスキャナがたどる経路を位置合わせする光学デバイスとして、スキャナマウス30が提供され、スキャナマウス30は、レーザスキャナ10に配置され、基準表面Gに対するレーザスキャナ全体の動きを光学的に測定する。  (もっと読む)
(もっと読む)
ミラーアクチュエータおよびビーム照射装置

【課題】回動軸における摩擦や不要な制動力を抑制でき、ミラーの回動性能を高めることができるミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ100は、マグネットユニット130と、マグネットユニット130に固定された支軸111と、支軸111に回動可能に軸支されたチルトユニット110と、チルトユニット110に固定され支軸111に垂直な支軸125と、支軸125に回動可能に軸支されたパンユニット120と、パンユニット120に装着されたミラー140とを備える。チルトユニット110とパンユニット120は、それぞれ、支軸111と支軸125を1ヵ所で軸受けする軸受部112と軸受部122を有する。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】目標領域に対するレーザ光の照射精度を高く維持しながら、制御回路の処理負担を軽減できるビーム照射装置およびレーザレーダを提供する。
【解決手段】スキャン制御部1aは、Tilt方向におけるミラー制御の半分の頻度で、Pan方向におけるミラー制御を行う。また、スキャン制御部1aは、PSD308上に設定された目標軌道上のQn、Qn+1、…に対応する位置にサーボ用レーザ光の実測位置が到達したことに応じて、レーザ光源401をパルス状に発光させる。これにより、走査用レーザ光は、サーボ用レーザ光の実測位置がQn’、Qn+1’、…に到達したタイミングで、目標領域に照射される。こうすると、Pan方向におけるミラー制御をラフに行いながら、略一定振り角毎に、走査用レーザ光を目標領域に照射できる。
(もっと読む)
レーザレーダ装置
【課題】分光効率が良く、検出性能に優れたレーザレーダ装置において、誤検出を効果的に防止しうる構成を提供する。
【解決手段】レーザレーダ装置1にはミラー30が設けられている。このミラー30の反射面30aは、レーザ光L0の光軸に対し所定角度で傾斜しており、ミラー30内には反射面30aと交差する方向に延びる貫通路32が形成されている。レーザレーダ装置1は、レーザダイオード10からのレーザ光L0を上記貫通路32を介して通過させ、他方、検出物体からの反射光L3については、反射面30aによりフォトダイオード20に向けて反射する構成をなしている。更に、レーザダイオオード10と貫通路32との間に、レーザ光L0が貫通路32にて反射して反射面30a側に漏洩することを防ぐ導光部材70が設けられている。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】位置検出信号に対するレーザ光(外乱光)の影響を抑制し、位置検出精度を高めることができるビーム照射装置およびレーザレーダを提供する。
【解決手段】PSD308からの出力信号に基づいてサーボ光の受光位置に応じた信号を生成するPSD信号処理回路3と、PSD信号処理回路308からの信号に基づいてレーザ光の走査位置を検出するDSP8を備える。DSP8は、レーザ光の発光期間以外の期間(位置検出期間)においてレーザ光の走査位置の検出を行う。
(もっと読む)
船舶の航路上の物体の検知と画像化のシステム
高速船舶及び他の船舶の航路内の物体(16)の検知と画像化及び、航海安全にリスクとなる物体の警告システムであって、船舶は航行及び通信システム(28)を備え、物体のレーザ照明用の走査ユニット(10)、制御ユニット(11)、オペレータパネル(12)を有する。走査ユニットは、システムの視野の内にレーザビーム(33)を放出するように調整された目に安全な赤外レーザの光源(30)と、レーザビームの出力パワーの監視と、物体までの距離の測定用のトリガパルスの生成と、反射放射エネルギーを受信/検知し、物体との距離を放射光と反射光の時間差に基づいて計測し、パルスエネルギーとピーク効果を計測し、第1(19)と第2(20)の走査機構により、レーザビームと光学検知器(38)の瞬時の視野を問題の走査領域に亘って走査し、船舶に対する瞬時の放射方向に関する方向情報を獲得する。 (もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を精度良く検出できるビーム照射装置を提供する。
【解決手段】ビーム走査用のミラー113に伴って回動する透明体200を配する。この透明体200にサーボ光を照射し、透明体200によって屈折されたサーボ光をPSD308にて受光する。PSD308の受光光量に応じた出力(SUM出力)を生成し、この出力が基準値(Vref)に一致するよう、半導体レーザ303の出力を制御する。このように制御することで、透明体200が回動しても、PSD308の受光光量は略一定となり、PSD出力に含まれる誤差を抑制できる。また、PSD308の受光光量が極端に低下した場合、SUM出力の替わりにモニター用PD303aの出力をサーボ光の出力制御に用いる。これにより、半導体レーザ303に過電流が流れることを防ぐことができる。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査制御を簡易かつ高精度に行い得るビーム照射装置を提供する。
【解決手段】ミラー113が中立位置にあるときに、サーボ光が透明体200の入射面と出射面に垂直に入射するよう、半導体レーザ303と透明体200を配置する。これにより、サーボ光の走査軌跡が直線に近くなる。サーボ光の走査軌跡間の間隔を広げるには、透明体200をミラー113に平行に配置すると良い。こうすると、PSD308による照射位置検出の分解能を高めることができ、検出信号の品質を高めることができる。
(もっと読む)
ビーム照射装置
【課題】位置検出信号に対するレーザ光(外乱光)の影響を抑制し、位置検出信号の精度を高めることができるビーム照射装置を提供する。
【解決手段】PSD308からの出力信号に基づいてサーボ光の受光位置に応じた信号を生成するPSD信号処理回路3を備える。PSD信号処理回路3は、目標領域に照射されるレーザ光の一部がPSD308に入射することにより生じる外乱信号をPSD308からの出力信号から除去する信号除去回路15、16、17、18を有する。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を精度良く検出できるビーム照射装置を提供する。
【解決手段】ビーム走査用のミラー113に伴って回動する透明体200を配する。この透明体200にサーボ光を照射し、透明体200によって屈折されたサーボ光をPSD308にて受光する。PSD308の受光光量に応じた出力(APC用出力)を生成し、この出力が基準値(Vref)に一致するよう、半導体レーザ303の出力を制御する。このように制御することで、透明体200が回動しても、PSD308の受光光量は略一定となり、PSD出力に含まれる誤差を抑制できる。
(もっと読む)
光照射装置
【課題】レーザビームのスキャンパターンを徐々に変更することができ、且つ位置検出素子の精度誤差を補正して正確なアクチュエータの位置制御を行うことができる光照射装置を提供すること。
【解決手段】スキャナ制御部300内のDSP301が有するメモリ301dにスキャンパターンに応じた複数の角度指示値を制御パラメータとして記憶させておく。システム制御部100からスキャンパターンの切り替え指示がなされた場合には、アクチュエータ202の位置指示値が不連続に変化しないようにメモリ301dから角度指示値を読み出して目標角度指示テーブル設定部301eに設定する。また、メモリ301dに記憶させる角度指示値はPSD204aの非線形誤差を打ち消す補正値によって補正しておく。
(もっと読む)
測距装置
【課題】防振機能付き測距装置の低コスト化を図ること。
【解決手段】測距装置1は、目標物体に向けレーザ光L1を投射する送信光学系10と、目標物体で反射した反射レーザ光L2を受光素子34により受光する受信光学系30とを備える。手ブレなどで光軸2,4が傾いたとき、送信光学系10に配設された防振レンズ14を駆動機構42によりM1のように変位させて光線を偏向する。駆動機構42に連動して受信光学系30に配設された防振レンズ32を駆動機構43によりM2のように変位させるが,M2はM1よりもラフな動作とする。
(もっと読む)
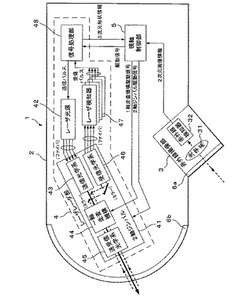
移動体位置測定装置、移動体位置測定方法、及び移動体位置測定プログラム
【課題】複数の装置を組み合わせて用いることなく、光学系による測定方法を工夫することにより飛翔体の位置測定精度を高めることができるようにする。
【解決手段】レーザ部1が2つの連続するレーザパルスを生成して発射すると、送信光学部2が送信レーザパルスP1を所定の時間間隔Δtでターゲット10へ送信する。受信光学部3が、ターゲット10で反射した受信レーザパルスP2を集光すると、多チャンネンル光検出部4が、受信レーザパルスP2を入射方向に対応するチャンネルごとに検出し、多チャンネル測距部5が送信レーザパルスP1の送信時刻と受信レーザパルスP2の受信時刻との時間差を測定する。そして、制御部8が、多チャンネル測距部5の測定した時間差によってターゲット10までの距離を算出すると共に、多チャンネンル光検出部4で検出されたチャンネルの位置からターゲット10の移動方向を算出する。
(もっと読む)
追尾式レーザ干渉計と標的間距離の推定方法及び追尾式レーザ干渉計
【課題】光軸のずれを検出するセンサが小型で、その検出範囲が狭い場合でも、測定中に正確な絶対距離を推定可能とする。
【解決手段】レーザ干渉計101と、該レーザ干渉計の光軸のずれを検出する光軸ずれ量検出センサ102と、前記レーザ干渉計を任意の方向に向ける2軸回転機構104と、該2軸回転機構の回転角を検出する角度センサ105と、入射光と平行な方向に反射光を反射する再帰反射体107と、前記光軸ずれ量検出センサと角度センサの信号を元に再帰反射体を追尾するように2軸回転機構を駆動するコントローラ108とを有する追尾式レーザ干渉計において、前記再帰反射体の停止を検出し、該停止検出時に、前記光軸ずれ量検出センサで求めた移動中の光軸のずれ量の総和と、前記角度センサで求めた移動中の回転角を元に距離を計算する。
(もっと読む)
ビーム照射装置
【課題】目標領域内におけるスキャン動作を精度よく行い得るビーム照射装置を提供する。
【解決手段】制御処理部202は、ミラーアアクチュエータ100を第1基準位置と第2基準位置の近傍域で2次元的に駆動させ、これら基準位置を検出した時のPSD106の出力値(座標データ)を記憶する。温度変化や経年変化等の影響でPSDの状態が初期状態から変化すると、図8(b)に示す如く、記憶された座標データ(第1基準点R1´、第2基準点R2´)は、初期状態において設定した座標データ(第1基準点R1、第2基準点R2)からずれるようになる。制御処理部202は、これら2つの基準点におけるズレ量ΔP1、ΔP2とズレ量ΔQ1、ΔQ2に基づいて目標値テーブル202aのデータ校正を行い、校正した目標値テーブルを用いてサーボ動作を行う。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を精度良く検出できるビーム照射装置を提供する。
【解決手段】ビーム走査用のミラー113に伴って回動する透明体200を配する。この透明体200にサーボ光を照射し、透明体200によって屈折されたサーボ光をPSD306にて受光する。透明体200のサーボ光の入射面と出射面に、これら入射面と出射面から離れるに従って先細りとなった微細な周期構造201を、サーボ光の波長帯以下のピッチにて形成する。
(もっと読む)
光学式変位計
【課題】 ラインセンサからの受光量の出力時間を短縮化させ、応答性を向上させた光学式変位計を提供することを目的とする。
【解決手段】 同一の半導体基板上に奇数素子20a及び偶数素子20bが交互に配置されたラインセンサ20と、奇数素子20aの受光量が入力され、当該受光量を順に出力する第1シリアル出力部21aと、偶数素子20bの受光量が入力され、当該受光量を順に出力する第2シリアル出力部20bとを備え、奇数素子20a及び偶数素子20bのいずれか一方から出力される同時に露光して求められた受光量に基づいて、上記ラインセンサの投受光条件を求めるフィードバック制御を繰り返し、受光量調整のための時間を短縮化させる。
(もっと読む)
ビーム照射装置およびレーザレーダ
【課題】光検出器上におけるサーボ光の振り幅を円滑に抑制できるビーム照射装置およびレーザレーダを提供する。
【解決手段】サーボ光を受光する光検出器の前段に光を拡散する光拡散素子(拡散板107)を配し、光拡散素子上におけるサーボ光の入射位置を所定の面積領域(孔108a)を介して光検出器(PSD109)上に投影する光投影素子(ピンホール板108)をさらに配する。このように構成すると、光検出器上におけるサーボ光の振り幅が抑制される。よって、光検出器の小型化と低コスト化を実現できる。
(もっと読む)
21 - 40 / 60
[ Back to top ]