
Fターム[5L096AA06]の内容
イメージ分析 (61,341) | 分析対象画像の物理的性質 (6,787) | 量子化レベル (4,407) | 濃淡(多値) (4,289)
Fターム[5L096AA06]に分類される特許
201 - 220 / 4,289
並列演算装置及びマイクロコンピュータ
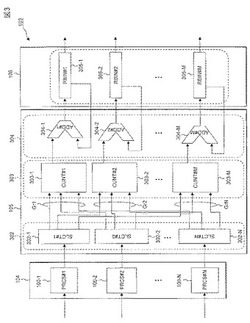
【課題】並列的に入力されるデータに対処してヒストグラムの度数データを生成することができ、ヒストグラムの度数データを生成する処理時間をその入力データにおけるヒストグラム値の分布状況に依存せず、更にはヒストグラムの度数データを累積するために用いる記憶領域を少なくすることができる並列演算装置を提供する。
【解決手段】複数のプロセッサによる並列的な演算結果に対して、演算結果の種別毎にそのデータ数を並列的に計数する複数のカウンタを有し、夫々のカウンタの計数値を累積してヒストグラムの度数とするヒストグラムカウンタ回路を備える。
(もっと読む)
情報処理システム

【課題】サーバーの処理負荷をより軽減させた情報処理システムを提供する。
【解決手段】被写体を撮像して画像データを取得する撮像部11を備えた端末10と、撮像部11による撮像により取得された画像データに基づいて被写体を識別するサーバー110とを備える情報処理システム1であって、端末10は、画像データに対して所定のフィルター処理を施すフィルター処理部14と、所定のフィルター処理が施された画像データをサーバー110に送信する通信部15と、を備え、サーバー110は、送信された画像データを受信する通信部111と、受信された画像データと被写体の識別のための照合用データとの照合の結果に基づいて被写体を識別する制御部112と、を備える。
(もっと読む)
不審人物検知方法および装置、異常事象検知方法および装置
【課題】不審人物や異常事象を短時間の観察から精度良く検知できる不審人物(異常事象)検知方法および装置を提供する。
【解決手段】ルール登録部15は、不審人物の行動シーケンスを表したシーケンス長さ別の行動シーケンスルールと、不審人物の移動経路を表した経路長さ別の移動経路ルールとを記憶し、処理部12は、カメラ11画像内の人物を追尾し、追尾人物の動作を時系列に並べた行動シーケンスデータと、追尾人物の所在位置を時系列に並べた移動経路データとを繰り返し更新し、追尾人物の動作が変化した場合に、シーケンス長さ毎に、行動シーケンスルールと一致する行動シーケンスが行動シーケンスデータに含まれるかを調べて該当時にスコアを上昇させ、追尾人物の所在位置が変化した場合に、経路長さ毎に、移動経路ルールと一致する移動経路が移動経路データに含まれるかを調べて該当時にスコアを上昇させ、スコアが閾値を超えると不審人物と判定する。
(もっと読む)
認識装置および方法、プログラム、並びに記録媒体
【課題】画像認識に係る技術について、画像の欠損、ノイズなどに対する耐性をさらに高めることができるようにする。
【解決手段】入力画像から得られる所定の特徴点を抽出し、入力画像に含まれる所定の図形を特定するための軌跡が表示された画像であって、特徴点に対応する軌跡画像を、ハフ変換を用いて取得し、認識対象オブジェクトが含まれている学習画像に基づいて得られた軌跡画像と、認識対象オブジェクトが含まれていない学習画像に基づいて得られた軌跡画像とから求められた複数の特徴量を用いた統計学習により生成された識別器を用い、特徴量に基づいて、入力画像から認識対象オブジェクトを検出する。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】頭部特徴である頭部上方のエッジをより高精度で検出できるようにする。
【解決手段】画像から被写体の領域を検出する画像処理装置であって、前記被写体の所定の部位を検出する検出手段と、前記被写体の他の候補領域を検出し、各候補領域にスコアを付ける手段と、各部位の位置とサイズとの関係から前記各候補領域のスコアに重みを付ける手段と、前記重みを付けたスコアに基づいて、前記被写体の他の部位の領域を選択する手段とを備える。
(もっと読む)
画像処理方法及び画像処理装置
【課題】取得画像のコンテンツに依存することなしに画像の歪み及び変形を補正することを可能にする画像処理方法等を提供する。
【解決手段】画像処理方法は、取得画像におけるオブジェクト領域の輪郭の角を推定し、オブジェクト領域から離れる方向に沿って所定角度範囲内でその推定された角からオフセットされる2つの点の間でオブジェクト領域の輪郭線を探し、オブジェクト領域の輪郭の最終的な角として輪郭線の交差点を決定し、オブジェクト領域の最終的な輪郭として前記最終的な角の間の輪郭線を決定する。
(もっと読む)
物体検出装置及び物体検出プログラム
【課題】物体の姿勢に拘わらず物体の正面領域を追跡する物体検出装置を提供する。
【解決手段】
静止画像と複数のフレーム画像からなる動画像とを取得することができる画像取得部2,5を有し、姿勢を変えた物体を検出する物体検出装置1であって、画像取得部2で撮影された物体の静止画像からテンプレートとしてのヒストグラムを作成する参照情報作成部4と、画像取得部5で撮影された動画像を構成する複数のフレーム画像の内、探索対象のフレーム画像と参照情報作成部4で作成されたテンプレートとに基づいて、探索対象のフレーム画像から物体領域を検出する検出処理部6と、を備えている。
(もっと読む)
画像処理装置、そのプログラム、および画像処理方法
【課題】ブロックマッチングにより探索される対応点の信頼度を改善する。
【解決手段】画像処理装置は、第1画像上に予め設定された注目点を空間的に内包する第1基準ブロックと、第2画像上に設定された複数の第1参照ブロックのそれぞれとの画像内容の類似度をそれぞれ表現した複数の第1指標値を取得する第1演算部と、該複数の第1指標値に基づいて、注目点に対応した対応点の複数の候補点を前記第2画像においてそれぞれ抽出する抽出部と、複数の候補点をそれぞれ空間的に内包する複数の第2基準ブロックのそれぞれと、第1画像上の第2参照ブロックとの第2ブロックマッチングにより、複数の候補点のそれぞれについて、対応点としての選択の適性を表現した複数の第2指標値を取得する第2演算部と、該複数の第2指標値に基づいて、複数の候補点の中から1つを選択することにより、対応点を決定する決定部とを備える。
(もっと読む)
パターン位置検出方法
【課題】簡便な画像処理によって部品の位置検出時間を短縮する。
【解決手段】モデル画像取得工程と、取得したモデル画像を特定のパターンを含む複数の基準画像に分割する基準画像生成工程と、検出対象物の画像を取得する検出画像取得工程と、検出画像の上の複数の所定位置に各基準画像の各原点を合わせる原点あわせ工程と、各基準画像の各原点を検出画像の上の複数の所定位置からXY方向にずらしながら検出画像の中の各基準画像に対応する各領域にある各検出画像部分と各基準画像とを順次対比し、各相関値を順次取得する対比工程と、それぞれの対比位置における各相関値を統合XY面内で統合して統合相関値を生成する統合工程と、統合した統合相関値のピークの統合XY座標値を検出対象物の各所定位置からXY面内での各基準画像に含まれる各特定のパターンの位置のズレと認識する位置ズレ認識工程と、を含むことを特徴とする。
(もっと読む)
オプティカルフロー検出装置
【課題】この発明は、単独のフローの信頼度評価に対応でき、誤った衝突可能性判定を回避できるオプティカルフロー検出装置を実現することを目的とする。
【解決手段】この発明は、広角レンズを有する撮像手段と、撮像手段により撮像された画像上の物体のオプティカルフローを検出するオプティカルフロー検出手段と、撮像手段により次回撮像される時の、オプティカルフロー検出手段によりオプティカルフローを検出された画像上の第1の物体の、オプティカルフローを予測するオプティカルフロー予測手段とを備え、オプティカルフロー予測手段は、第1の物体は移動前後で高さの変動を発生せずに前方及び横方向に等速移動するとしてイメージプレーン上の移動予測位置を算出することを特徴とする。
(もっと読む)
表情認識装置、方法、及びプログラム
【課題】表情カテゴリの変化が様々な速度で行われても、表情カテゴリを精度良く、かつ早期に認識することができるようにする。
【解決手段】表情学習部16によって、各表情カテゴリについて、無表情から当該表情カテゴリへ変化したときの参照用の時系列データに基づいて、当該表情カテゴリであるか否かを識別する早期識別器を学習する。入力部10によって、無表情からの変化を示す時系列データを取得する。第2動的時間伸縮部24によって、各表情カテゴリについて、取得された時系列データを、当該表情カテゴリへ変化するときの参照用の時系列データに対してデータの変化が一致するように時間方向に伸縮させた時間伸縮時系列データを各々生成する。早期認識部26によって、各表情カテゴリについて生成された時間伸縮時系列データと、各表情カテゴリに対する早期識別器とに基づいて、人物の顔の表情カテゴリを認識する。
(もっと読む)
物体領域検出装置、物体領域検出方法、及び物体領域検出プログラム
【課題】前景画像を撮像した実環境に応じて対象物体を示す物体領域を検出する。
【解決手段】物体領域検出装置は、前景画像データにおける照明条件に基づいて定められた変換領域と、該変換領域に対応付けられた表色系とを示すマスク情報に基づいて、前景画像データが示す画像における表色系を変換し、表色系が変換された前景画像データの色分布に基づいて、検出対象となる対象物体が撮像されていない背景画像データ及び前記前景画像データが示す画像を複数の部分領域に分割し、複数の部分領域ごとに、前景画像データ及び背景画像データそれぞれのヒストグラムを算出して、該部分領域に対応する前景画像データ及び背景画像データのヒストグラムの類似度に基づいて、前記対象物体が存在するか否かを判定し、前景画像データのうち、前記対象物体が存在すると判定された部分領域に対応する画像データを出力する。
(もっと読む)
区画線認識装置、区画線認識方法、プログラム及び媒体
【課題】より適切な警報を行ってドライバに自車両を自車線の中央を維持する走行を適切に促すことができる区画線認識装置を提供すること。
【解決手段】本発明による区画線認識装置1は、車両の前方の路面を含んで撮像する撮像手段2と、撮像手段2の出力する画像情報から路面内のエッジ点を抽出するエッジ点抽出手段3aと、エッジ点から区画線に相当する可能性を有する線分群を抽出する線分抽出手段3bと、線分群から区画線に相当する線分を検出する検出手段3cと、を含み、検出手段3cによる検出が所定未検出回数N以上なされない場合に、所定再検出回数M以上連続して、検出手段3cによる検出がされた場合に、検出を確定する確定手段3dを含むことを特徴とする。
(もっと読む)
テキスト強調方法及び装置、並びにテキスト抽出方法及び装置
【課題】コンピュータが画像におけるテキストを強調する方法を提供する。
【解決手段】コンピュータが、少なくとも一行のテキストを含む原画像を取得する現画像取得ステップ、前記原画像における任意な原画素点からその近傍集合における各近傍画素点までの直接差異度及び間接差異度に基づいて、前記各原画素点の原輝度値又は/及び原色値に対して筆画二次元フィルタリングを行い、前記原画像のフィルタリング後の更新輝度値又は/及び更新色値を取得する更新値取得ステップ、及び、前記原画像のフィルタリング後の前記更新輝度値又は/及び更新色値により、対応する前記原輝度値又は及び原色値をそれぞれ置換し、前記原画像に対応するテキスト強調画像を生成する強調画像生成ステップを実行する。前記近傍集合の範囲は、前記原画素点を中心とし、且つ辺長がwである正方形となり、wは前記原画像の高さより小さい。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】頭部特徴である頭部上方のエッジをより高精度で検出できるようにする。
【解決手段】設定された頭部検出領域についてエッジ画素を検出する手段と、前記エッジ画素をハフ変換における楕円パラメータの空間の各楕円に累積する手段と、前記エッジ画素の数に基づいて候補楕円を選出する手段と、楕円性指標から構成された総合指標を用いて前記候補楕円から頭部楕円を選択する手段とを備えるようにして、頭部特徴である頭部上方のエッジをより高精度で検出できるようにする。
(もっと読む)
画像処理方法、画像処理装置及びスキャナ
【課題】特定のオブジェクトの境界の内側にある、画像における領域を確保し、これにより特定のオブジェクト手の領域、即ち別のオブジェクトを画像から間接的に除く。
【解決手段】画像処理方法は、画像における前景のオブジェクトのエッジマップを決定するエッジマップ決定手段、エッジマップから境界線の候補を取得し、境界線の候補のうちで、前景のオブジェクトにおける特定のオブジェクトの境界を定義する境界線を決定する境界線決定手段、及び特定のオブジェクト以外の前記境界線を超える前記前景のオブジェクトを除く除去手段を備える。この方法は、特定のオブジェクトの境界を越えて捕捉された画像における、例えば手のような別のオブジェクトの画像を除去することに適用される。本発明の実施の形態に係る画像処理方法によれば、画像における特定のオブジェクトの境界は、正確に決定され、これにより境界を越える別のオブジェクトを除去して、その後の他の画像処理を容易にすることができる。
(もっと読む)
ピーク座標推定装置及びピーク座標推定方法
【課題】ピーク座標推定の精度を高めることのできるピーク座標推定装置を得る。
【解決手段】暫定ピーク検出部1は、暫定ピーク判定領域で、中心座標の信号値が周辺の座標に位置する信号値に比較して突出した値であった場合、中心座標を暫定ピーク座標として検出する。対象範囲決定部2は、暫定ピーク座標と、暫定ピーク座標の周辺に位置すると共に、予め定めた閾値以上の値を有する信号値の座標の集合を対象範囲として生成する。重心座標算出部3は、対象範囲において、暫定ピーク座標の信号値を重みとして重心座標を求め、重心座標を推定されたピーク信号の座標値として算出する。
(もっと読む)
顔画像検索システム、及び顔画像検索方法
【課題】より効率的に顔画像の検索を行うことができる顔画像検索システム、及び顔画像検索方法を提供する。
【解決手段】予め複数の顔特徴をデータベースとして記憶する記憶部と、画像データを受信する画像受信部と、前記画像データから顔画像を検出する顔検出部と、前記顔検出部により検出された前記顔画像から顔特徴を抽出する特徴抽出部と、前記特徴抽出部により抽出された前記顔特徴と、前記データベースに含まれている前記顔特徴との類似度を算出し、算出した類似度に基づいて検索結果を出力する検索部と、前記検索部により出力された前記検索結果の量を計測する計測部と、前記検索結果量が予め設定された閾値以上である場合、前記検索部により出力された前記検索結果を選別する選別部と、前記選別部により選別された前記検索結果に基づいて検索結果画面を生成する表示制御部と、前記検索結果画面を出力する出力部と、を具備する。
(もっと読む)
追尾装置、追尾方法及びプログラム
【課題】移動物体の速度に関係なく、長時間、より正確に移動体の追尾を行うことを目的とする。
【解決手段】特徴量に対応したパラメータに基づいて撮像手段で撮像された画像中の動体を検出する物体検出手段と、カメラの姿勢を制御する姿勢制御手段と、動体の速度に応じて物体検出手段のパラメータを動的に変更する制御手段と、を有することによって課題を解決する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】良好に異物影を検出できる画像処理装置および画像処理プログラムを提供する。
【解決手段】本発明の画像処理装置50は、2色以上のカラーフィルタ13aを通して撮像素子13により撮影された処理対象画像が入力される画像入力部52と、処理対象画像中に移り込んだ影部の大きさを判定し、一定の範囲内のものを第一次異物影候補として抽出する第一次判定を行う第一次異物影判定部61,62と、第一次異物影判定部において第一異物影候補であると判定された影部について、2色以上のカラーフィルタのうちの1色を通した光の第1色画像における、影部内の外に対する強度の第1落込割合と、他の1色を通した光の第2色画像における、影部内の外に対する強度の第2落込割合と検出し、第1落込割合と第2落込割合と差が閾値以下の影部を、第一異物影候補から更に絞り込んで第二次異物影候補と判定する第二次判定を行う第二次異物影判定部67と、を備える。
(もっと読む)
201 - 220 / 4,289
[ Back to top ]