
Fターム[5L096AA06]の内容
イメージ分析 (61,341) | 分析対象画像の物理的性質 (6,787) | 量子化レベル (4,407) | 濃淡(多値) (4,289)
Fターム[5L096AA06]に分類される特許
81 - 100 / 4,289
画像処理方法及び画像処理装置
【課題】着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことが可能な画像処理方法等を提供する。
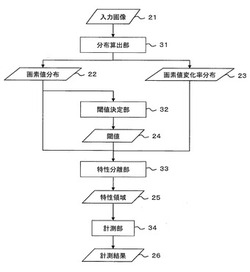
【解決手段】画像処理装置1は、分布算出部31、閾値決定部32、特性分離部33、及び計測部34の機能を備える。分布算出部31は、入力画像21を入力とし、画素値分布22及び画素値変化率分布23を出力する。閾値決定部32は、画素値分布22に基づく値を入力とする人工知能的アルゴリズムによって、閾値24を出力する。特性分離部33は、画素値分布22、画素値変化率分布23、及び閾値24を入力とし、これらを用いて入力画像21の領域を特性ごとの領域に分離し、特性領域25を出力する。計測部34は、特性領域25を入力し、特性領域25に基づいて計測処理を行い、計測結果26を出力する。
(もっと読む)
画像処理装置

【課題】パターンマッチングの対象となるブロックサイズが異なる場合においても、その信頼性を正当に評価する。
【解決手段】画像処理装置120のマッチング処理部172は、一対の画像データそれぞれから、対象物の相対距離に応じた大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定する。信頼性評価部174は、特定されたブロックの信頼性を示す評価値をブロックの大きさに基づいて1または複数導出する。そして、正規化部176は、導出された評価値を、その評価値の最大値が基準ブロックにおける評価値の最大値の面積比となるように正規化し、特定されたブロックに関連付ける。こうして、マッチング処理部172によって導出される視差を、正規化された評価値で正当にフィルタリングすることが可能となる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】対象物体の追尾を適切に打ち切る。
【解決手段】消失領域設定部602は、撮像部601により撮像された画像データに対して領域を設定する。物体追尾部603は、画像データ内における対象物体を追尾し、対象物体が前記領域内に入った場合、対象物体の追尾を停止する。
(もっと読む)
箱詰め物検査方法および箱詰め物検査装置
【課題】箱詰めされる物品の種類、形状、重量などを問わず、物品や仕切板の欠落など、種々の箱詰め不良を非接触で検出することを可能とする。
【解決手段】複数個のガラスびん1が整列された状態で箱詰めされる箱詰め物12の箱詰め状態を検査する。準備工程では適正な箱詰め状態の箱詰め物12を撮像して得られる基準画像について各ガラスびん1が整列配置される位置に検査領域をそれぞれ設定して、各検査領域内の基準画像についての濃度分布に関する情報を抽出することにより検査領域毎の基準となる情報を取得する。検査工程では検査対象の箱詰め物12を撮像して得られる検査対象画像について各ガラスびんが整列配置される位置に検査領域をそれぞれ設定して、各検査領域内の検査対象画像についての濃度分布に関する検査情報を抽出した後、各検査情報を前記基準となる情報と対比して箱詰め状態の適否を判別する。
(もっと読む)
画像処理装置
【課題】パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、輝度が復元された一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部176と、を備え、色復元部およびマッチング処理部は、ベイヤー配列で占有度が最も高い色相のみを対象に、それぞれ輝度の復元およびマッチングを実行する。こうして、パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する平面形状のタガント(微小細粒)を物品に付与し、その分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、タガントをランダムに配置しておき、各物品をスキャナ等により光学的に読み取り、タガントの画素数(第1画素数)とタガントの特徴点を抽出し、基準特徴点データとして記憶しておく。識別対象となる物品を上述と同様の手法で読み取り、抽出されたタガント候補領域の中から、タガントの所定の画素数(第1画素数)と近似しない画素数を有するタガント候補領域をノイズとして除去する。その後、対象物品のタガント候補領域の特徴点を抽出する。そして、抽出した対象物品特徴点のデータと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
画像マッチング装置及び画像マッチングプログラム
【課題】特徴ベースの画像マッチングにおいて、誤対応付けの影響を減らすことができる画像マッチング装置を提供する。
【解決手段】クエリ画像と、検索対象データベース内に予め保存された保存画像のそれぞれから抽出した特徴箇所毎に特徴量を算出する特徴表現手段と、クエリ画像と、保存画像間において、特徴表現手段により算出した特徴量からスコアを算出し、クエリ画像の特徴箇所に対応する保存画像へのスコア投票結果に基づき画像マッチングを行う照合手段とを備えた画像マッチング装置であって、照合手段は、クエリ画像と保存画像間において特徴箇所の対応付けの確からしさを示すスコアを投票し、スコア投票結果に基づき画像マッチングを行って、クエリ画像とマッチングする保存画像を求める。
(もっと読む)
線分および円弧検出装置
【課題】ハフ変換を利用して精度よく線分あるいは円弧を検出することを課題とする。
【解決手段】ハフ変換部14は、第1〜第3成分データ102A〜102Cに対して輪郭抽出処理を実行し、第1〜第3輪郭データ103A〜103Cを生成する。第1〜第3輪郭データ103A〜103Cの各画素は0〜255の画素値を有する。ハフ変換部14は、第1〜第3輪郭データ103A〜103Cの各点に対してハフ変換を実行する。ハフテーブル15には、第1〜第3輪郭データ103A〜103Cの各点の画素値、すなわち輪郭強度の値が加算値として集計される。検出部16は、各成分の集計値を総合評価し、線分あるいは円弧を検出する。
(もっと読む)
パターン測定方法
【課題】走査型電子顕微鏡で得られるパターンを撮像した画像から、フォトマスクのOPCパターンの寸法を精度良く且つ容易に測定することができるパターン測定方法を提供することを目的とする。
【解決手段】本発明のパターン測定方法は、フォトマスクのOPCパターンのうち、所望の範囲のパターンを包含する一回り大きい測定対象領域を設定し、測定対象領域のパターンの寸法を微小な領域毎に測定し、寸法の測定値を統計的に処理したものを曲線で近似し、近似曲線で表れるデータ群のうち、所望の範囲のパターン寸法に相当するデータ群の平均値を、所望の範囲のパターン寸法として推定する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個体識別装置100は、基準物品に付与されたタガント分布層11を光学的に読み取り(S101)、基準物品の特徴点を抽出し(S102)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて基準特徴量データを算出し(S103)、基準特徴量データを記憶する(S104)。また、対象物品に付与されたタガント分布層11を光学的に読み取り(S105)、対象物品の特徴点を抽出し(S106)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて対象特徴量データを算出し(S107)、基準特徴量データと対象特徴量データとを照合し(S108)、一致するか否かを判断する(S109)。
(もっと読む)
命令信号送信装置およびその動作方法
【課題】操作が容易で、ロバスト性が高い命令信号送信装置およびその動作方法を提供する。
【解決手段】画像取得部14が、カメラ12で撮像された画像を取得し、遮蔽時間長特徴検出部15が、連続的に取得された複数の画像を基にカメラ12の前の空間が塞がれている時間の長さの特徴を検出する。検出された特徴が予め定められた条件を満たすなら、命令読出部16が、命令記憶部13から命令を読み出し、命令信号送信部が、命令を示す命令信号をコンピュータに送信する。
(もっと読む)
コーナー検出装置
【課題】 撮像状況によって分離して抽出された2つのエッジ間に存在するコーナーを検出できるコーナー検出装置を提供する。
【解決手段】 車両に搭載し、周囲環境を画像として撮像するカメラ1と、撮像された画像に対し、2方向以上の直線エッジ成分を抽出するエッジ抽出部3と、各エッジを構成する画素に対して、エッジの直交方向の速度であるフローを算出するフロー算出部4と、エッジ端をエッジ方向(エッジの延びる方向)に延長するエッジ延長部5と、延長されたエッジに基づき、方向の異なるエッジ同士の交点をコーナーとして判別するコーナー判別部6と、を備え、エッジ延長部5は、延長した先に同じ大きさを有するフローが存在する場合、延長を有効と見なして再線化する。
(もっと読む)
画像解析装置および画像評価装置
【課題】人物とその地点を代表するランドマークのようなオブジェクトとが被写体となるような撮影画像を解析してオブジェクトの位置を識別する。
【解決手段】オブジェクト探索領域抽出部303は、画像データから顔領域および胴体領域を除いてオブジェクト探索領域を抽出する。顕著領域候補抽出部304は、オブジェクト探索領域から複数の顕著領域候補を抽出する。独自色性算出部305は、オブジェクト探索領域の各画素の色情報を識別し、各色の独自色性を、その出現頻度および他の色との距離に基づいて定量的に算出する。存在確率算出部307は、オブジェクト領域の存在確率をブロック単位で算出する。オブジェクト領域識別部308は、各顕著領域候補の顕著領域としての尤度を算出し、最尤の顕著領域候補をオブジェクト領域に決定する。
(もっと読む)
顔認識装置、及び顔認識方法
【課題】認識精度の低下を抑止する。
【解決手段】実施形態の顔認識装置は、記憶手段と、入力手段と、顔検出手段と、保持手段と、抽出手段と、認識手段と、を備える。記憶手段は、人物毎に、当該人物の顔の特徴が表された顔特徴情報を記憶する。入力手段は、人物の少なくとも顔を含む画像情報を入力する。顔検出手段は、入力手段により入力された画像情報から、人物の顔が表された顔領域を検出する。保持手段は、検出された顔領域から顔の特徴を検出処理する検出手法を、検出処理の粗さの違いに基づいて複数保持する。抽出手段は、保持された複数の検出手法のうち、いずれか1つ以上を用いて、顔検出手段により検出された顔領域から、顔の特徴を示した特徴情報を抽出する。認識手段は、抽出手段により抽出された特徴情報と、記憶手段に記憶された顔特徴情報とに基づいて、画像情報に含まれていた人物を認識する。
(もっと読む)
命令信号送信装置およびその動作方法
【課題】操作が容易で、ロバスト性が高い命令信号送信装置およびその動作方法を提供する。
【解決手段】画像取得部14が、カメラ12で撮像された画像を取得し、画像特徴検出部15が、カメラ12の前の空間の少なくとも一部が塞がれることにより画像に生じる特徴を検出する。検出された特徴が予め定められた条件を満たすなら、命令読出部16が、命令記憶部13から命令を読み出し、命令信号送信部17が、命令を示す命令信号をコンピュータ(112)に送信する。
(もっと読む)
画像処理装置、画像処理方法、プログラム及び記録媒体
【課題】 処理対象の画像データに光沢部分が有るか否かの判定を、従来の判定手段が有する精度よりも高精度に行う。
【解決手段】 識別部13は、処理対象画像から光沢部分の特徴量として、“輝度と色”又は“輝度変化方向”を抽出し、抽出した当該特徴量を基に各々異なる識別手段を有する複数の弱識別器によって光沢部分を識別し、得られる各識別結果にパラメータを掛けて評価値を得、得られる評価値を総合して、所定の光沢部分であるか否かを判定する。検出処理部15は、判定結果により例えば白黒で光沢画像を検出する。学習処理部14は、正解が分かっている所定の光沢部分の訓練用画像を識別部13に用いることにより、学習処理を行い、学習結果として、光沢部分であるか否かの判定を適正化する上記パラメータの値を求める。また、処理対象の印刷用画像データに対しては、学習処理を経て適正化されたパラメータを設定して光沢部分の判定を行う。
(もっと読む)
画像処理装置、画像処理方法、および、プログラム
【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】取得される映像から、多項分布の背景モデルを生成し、背景を生成する生成部と、生成部により生成された背景モデルから、信頼度の高い背景が生成できるか否かを判断する判断部を備え、現画像において、生成される背景とは異なる部分の画像である動体が検出され、動体が、所定の一定時間以上停止しているかどうかが判定される。一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とが用いられて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度が求められる。求められた不動体信頼度に基づいて、現画像から、不動体が検出される。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
追跡装置、追跡方法およびプログラム
【課題】対象物が動くことにより画像にぶれが生じた場合でも、安定して対象物を追跡することが可能な追跡装置、追跡方法およびプログラムを提供する。
【解決手段】実施形態の追跡装置は、取得部と第1算出部と第2算出部と設定部とを含む。取得部は、追跡対象物を撮像して、時系列のフレーム単位で画像を取得する。第1算出部は、画像内の探索領域に含まれる各画素について、当該画素の画素値と基準値との一致度を示す第1尤度を算出する。第2算出部は、探索領域内の各画素について、当該画素の画素値と、過去のフレームにおける画像内の当該画素に対応する位置の画素値との差分を示す差分値を算出する。第1設定部は、探索領域内の各画素について、当該画素と、過去における追跡対象物の位置との距離が大きいほど、第1尤度の重みが小さくなるとともに差分値の重みが大きくなるように、第1尤度および差分値の各々の重みを設定する。
(もっと読む)
画像編集装置およびプログラム
【課題】移動する物体を撮影した一連の高速連写画像/動画から適切に画像を抽出して、移動物体の解析に効果的な学習教材を生成することが可能な画像編集装置を提供する。
【解決手段】移動物体を高速連写撮影(撮影間隔T)した各画像P1〜P15の合成画像CGが生成され、該合成画像CG上での各移動物体KB1〜KB15の位置(xy座標)が検出されると共に、これに基づき同移動物体KB1〜KB15の移動の軌跡が検出される。すると移動物体KB1〜KB15の移動の軌跡の特徴点Qmaxに対応するところの画像P8が特定され、この特定画像P8を含めて前記高速連写の撮影間隔Tよりも長いユーザ設定された撮影間隔Δtに対応するところの各画像P2,5,8,11,14が前記高速連写の各画像P1〜P15の中から抽出され連写抽出画像ファイルとして前記設定撮影間隔Δtと対応付けて画像&座標範囲ファイル記憶部に教材データとして記憶される。
(もっと読む)
画像識別装置および画像識別方法
【課題】専用の帳票を必要とせず、罫線のない帳票にも適用可能で、しかも類似帳票を正しく識別することができる画像識別装置および画像識別方法を提供する。
【解決手段】第1の画像としてのマスター画像を入力するマスター画像入力部101と、第2の画像としてのデータ画像を入力するデータ画像入力部102と、マスター画像に対して指定されるマスク領域の組を入力するマスク領域入力部104と、マスター画像とデータ画像とを整合させる画像整合部103と、整合されたマスター画像とデータ画像との間で、マスク領域を除いた差分を抽出する差分抽出部105と、抽出された差分の大きさにもとづいてマスター画像とデータ画像との相違度を出力する相違度出力部106と、を備える。
(もっと読む)
81 - 100 / 4,289
[ Back to top ]