
Fターム[5L096AA06]の内容
イメージ分析 (61,341) | 分析対象画像の物理的性質 (6,787) | 量子化レベル (4,407) | 濃淡(多値) (4,289)
Fターム[5L096AA06]に分類される特許
61 - 80 / 4,289
車線判別装置
【課題】登坂車線を簡易に且つ確実に判別することができる車線判別装置を提供する。
【解決手段】車両2に搭載される車線判別装置であって、車両2の走行中に走行する道路上の車線境界線を含む車両2の前方の画像を所定期間連続して取得する画像取得手部30と、連続する画像の各画像内に同一の車線境界線が存在するか否かを判定する境界線判定部43と、同一の車線境界線が存在すると境界線判定部43が判定した場合、画像の車線境界線上において画像濃度が所定値以上変化する点を車線境界線のエッジ点として画像毎に抽出するエッジ点抽出部44と、抽出された車線境界線のエッジ点の数を画像毎に集計する集計部45と、連続する画像において、集計したエッジ点の数の所定期間における周期的な変化に基づいて、車線境界線が登坂車線と走行車線との車線境界線であるか否かを判別する境界線判別部46と、を備える。
(もっと読む)
画像処理装置、画像処理方法

【課題】波長帯の異なる領域を抽出するための閾値を自動的に決定する。
【解決手段】高空から撮影した地理画像データにおける画素において、第1の波長帯の分光輝度値と、記第1の波長帯とは異なる第2の波長帯の分光輝度値と、に基づいて画素を識別するための正規化指標値を演算する正規化指標演算部と、各画素における前記正規化指標値と出現頻度との関係を求め、クラス内分散とクラス間分散の比である分離度が最大となる正規化指標値を判別分析法により求め、前記画素を識別するための閾値として決定する閾値決定部と、前記閾値と対応する正規化指標値に基づいて、前記第1及び第2の波長帯により区別される画像データの領域を抽出する領域抽出部と、を有することを特徴とする画像処理装置。
(もっと読む)
ジェスチャー解読装置
【課題】ジェスチャ操作を、特定の場所で動作する必要があったり、解析動作が複雑で処理の負荷が大きく部屋に居る人の全体の平均的空調制御を行うものであった。
【解決手段】温度検知手段103と、温度検知手段103で画像化した温度レベルが所定値以下で画像化した温度レベル数以下の温度レベルに分類するための温度レベル分け手段104と、温度分布情報保持手段105と、保持情報のうち最も高い温度レベルの画素の重心から所定範囲を解読範囲とする解読枠設定手段106と、ジェスチャー解読手段102を備え、解読枠設定手段106で設定された解読範囲の温度レベルの時間変化を元に解読を行うことで、人の操作位置の制限をなくし、しかも、処理の負荷量を減じて、使用者の体表温度状態を反映したジェスチャーを認識することができる。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】撮像された対象物に対応する商品の確定を簡便化して、より効率的に行うことが可能な情報処理装置及びプログラムを提供する。
【解決手段】実施形態の情報処理装置は、取込手段と、報知手段とを備える。取込手段は、撮像手段が撮像した画像を取り込む。報知手段は、前記撮像手段で撮像された物体の画像と、各商品の基準画像とがどの程度類似しているかを示す類似度が、前記撮像された商品を前記基準画像に対応する商品のうち一の商品として確定する条件を満たした場合に、前記撮像された商品が前記条件を満たした前記基準画像に対応する商品として確定されたことを報知する。
(もっと読む)
マーク検出方法
【課題】 検出対象であるマークのエッジを正確に検出することが可能なマーク検出方法を提供する。
【解決手段】 Y方向に延びる直線状のマークを含む二次元画像を、X方向に微分した後、Y方向に射影加算する工程と、射影加算時におけるY方向に存在するエッジの数をX方向の領域毎に検出するエッジ数検出工程と、エッジ数検出工程で検出したX方向の領域毎のエッジの数が設定値以下のときに射影加算後のX方向の領域毎の加算値を減少させる加算値補正工程と、加算値補正工程により補正した射影加算後のX方向の領域毎の加算値に基づいて直線状のマークのエッジを検出するエッジ検出工程とを備える。
(もっと読む)
被写体追尾装置およびカメラ
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
(もっと読む)
オプティカルフロー検出装置及び検出方法
【課題】本発明は、マッチング探索処理中に無効フローを除去し、マッチング探索処理の処理時間の短縮を図ることを目的としている。
【解決手段】このため、オプティカルフロー検出装置において、マッチングスコア算出手段とマッチングスコア差分算出手段とマッチングスコア差分判定手段とフロー内積算出手段とフロー内積評価手段とを備え、マッチング探索時、差分がしきい値以下の時に、フロー内積算出手段により内積値を算出し、フロー内積評価手段により無効フロ一を除去する。また、オプティカルフロー検出方法において、現在画像の画像データと過去画像の画像データから前回と今回のマッチングスコアの差分を算出し、マッチング探索時、差分がしきい値以下の場合に、前回までのオプティカルフローと今回のオプティカルフローで内積値を算出し、内積値でオプティカルフローの方向性を判定して無効フローを除去する。
(もっと読む)
フラットパネル表示基板製造装置、および、フラットパネル表示基板製造装置の画像処理方法
【課題】フラットパネル表示基板製造でアライメントマークを検索するときに、アライメントマークのマスク領域を自動生成し、高精度にアライメントマークを検索できるようにする。
【解決手段】表示パネルとTABの各々に位置合わせをおこなうためのアライメントマークにより、アライメントマークを認識するときに、撮像画像よりアライメントマーク教示画像を切り出し、そのアライメントマークを認識して、アライメントマークのエッジ点を抽出する。そして、エッジ点に囲まれたエッジ範囲を算出し、アライメントマーク教示画像のエッジ範囲に含まれない領域を、マスク領域として算出し、算出されたマスク領域により、アライメントマーク教示マスク画像を生成し、アライメントマーク教示マスク画像によりマスクしたアライメントマークを認識する。
(もっと読む)
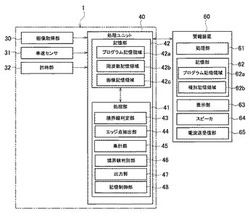
映像に基づく車両用警報システム
【課題】
任意の車両に搭載可能な警報システムにおいて、移動物体を効率的に検出する。
【解決手段】
本システムは、車両の周囲を連続的に撮影する少なくとも一つのカメラを有している。これにより、移動物体を監視する。また、カメラ画像におけるピクセルモーションに基づいて、任意の移動物体の運動を計算するようプログラムされたコンピュータユニットを備える。さらに、危険な移動物体が検出されたときに警報信号を発するための警報ユニットを備える。この判断を行うために、少なくとも一つの移動物体についての前記計算した運動と、予め定められた運動パターンとの関連性の調査又は比較を行う。
(もっと読む)
画像認識システムおよび画像認識方法
【課題】ネットワーク型画像認識システムのレスポンスを向上させる。
【解決手段】端末装置が取得した画像をサーバにおいて認識する画像認識システムであって、端末装置は、入力画像から加工画像を生成する画像処理部と、画像処理部によって生成される加工画像を前記サーバへ送信する通信部と、を有する。サーバは、端末装置から受信する加工画像に対して認識処理を行う認識部と、認識部による認識処理において不足している情報を判断する不足情報判断部と、端末装置に対して不足情報判断部による判断結果に対応する画像を要求する要求部と、を有する。画像処理部は、サーバからの要求に基づいて、入力画像から加工画像を生成する。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】本発明は、目標物が存在する可能性のある区域を精度よく推定する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲を一定の区域からなるメッシュに区切り、管理するメッシュ管理部と、探知した目標物の情報を有する探知情報を用いて、目標物の存在するメッシュを決定し、時間経過に応じて目標物の存在する目標存在メッシュを推定する目標推定部と、目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、目標存在メッシュを更新する同一化判定部と、目標物がない地域を示す否定情報を受信すると、地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する反映部と、を備えることを特徴とする目標管理装置である。
(もっと読む)
消失点推定方法、消失点推定装置及びコンピュータプログラム
【課題】消失点の推定精度を向上すること。
【解決手段】入力された画像に含まれる直線を検出し、直線の中から、略垂直の直線である垂直方向直線を検出し、画像に含まれる直線のうち垂直方向直線ではない直線である非垂直方向直線と、垂直方向直線との組合せのうち、その端点同士の距離が閾値よりも短い組合せを組合せ候補として検出し、組合せ候補の中から、垂直方向直線と非垂直方向直線とが類似している組合せ候補を消失線組合せとして選択し、選択された複数の消失線組合せにおける、複数の非垂直方向直線に基づいて消失点の位置を推定する。
(もっと読む)
画像処理装置、撮像装置、及びプログラム
【課題】画像をラベリングするための演算処理の負荷を軽減できる画像処理装置、撮像装置、及びプログラムを提供することを目的としている。
【解決手段】撮像された画像データを取得する画像取得部と、取得された画像データからシーンを判別するシーン判別部と、取得された画像データから色情報の頻度分布に基づき主要色を抽出する主要色抽出部と、シーン毎に色情報と第1ラベルとが関連付けられて予め記憶されている記憶部と、記憶部から抽出された主要色と判別されたシーンとに関連付けて予め記憶されている第1ラベルを読み出し、読み出した第1ラベルを取得された画像データのラベルとして生成する第1ラベル生成部と、を備える。
(もっと読む)
画像解析方法、画像解析装置及びコンピュータプログラム
【課題】手動による指定を行うことなく、撮影された物体に応じて画像を複数の領域に分割する。
【解決手段】入力された画像の背景の構成を推定し、構成の推定結果に基づいて、画像を複数の第一領域に分割し、第一領域に対し、その領域に写っている物体に応じたラベルを付与し、第一領域を、当該第一領域に付与されたラベルに基づいて複数の第二領域に分割し、第二領域に対し、その領域に移っている物体に応じたラベルを付与する。
(もっと読む)
肌画像分析装置及び肌画像分析方法
【課題】肌画像に基づいて肌の美しさを客観的に定量化すると共に、その要因分析を可能とする技術を提供する。
【解決手段】肌画像分析装置は、分析対象の肌画像に対して所定ぼかし強度でぼかし処理を施すことによりぼかし画像を取得するぼかし処理部と、上記分析対象肌画像と当該ぼかし画像との間の明暗情報の差分を算出することにより、当該ぼかし画像よりも暗い成分が除去された明差分画像、及び、当該ぼかし画像よりも明るい成分が除去された暗差分画像を生成する差分算出部と、明差分画像及び暗差分画像における各色情報から明成分の大きさを示す明成分代表値及び暗成分の大きさを示す暗成分代表値のペアを算出する代表値算出部と、を備える。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、距離情報の客観的な信頼度である評価値を提示できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部12と、メッセージの評価関数を計算する評価関数計算部13と、評価関数が最小となる距離を距離情報として推定する距離推定部14と、距離情報の信頼度を示す評価値を計算する評価値計算部15と、オクルージョンに起因する推定エラーが生じた領域を判定するオクルージョン領域判定部17と、テクスチャに起因する推定エラーが生じた領域を判定する無テクスチャ領域判定部19とを備える。
(もっと読む)
情報処理装置、情報処理方法、情報処理装置用プログラム、および、記録媒体
【課題】対象物の追跡が正確にできる情報処理装置等を提供する。
【解決手段】動画の予め選択された1のフレームの画像における対象物2上に少なくとも1つのパーティクルpを設定し(S3)、予め選択された1のフレーム20以降、動画における時間的に前のフレームと時間的に後のフレームとを順次取得し(S4)、取得される前のフレームの画像と後のフレームの画像との背景差分画像30を算出し(S5)、算出された背景差分画像に応じて、パーティクルの追跡範囲の外縁3aを決定し、前のフレームの画像におけるパーティクルの位置を基準とする所定範囲内かつ追跡範囲の外縁内であって、基準としたパーティクルの位置の画素の色情報と類似の色情報を有する画素の位置に、後のフレームの画像におけるパーティクルを設定し(S6)、設定されたパーティクルの位置から、後のフレームの画像における対象物の位置を特定する(S9)。
(もっと読む)
画像処理装置、画像処理方法
【課題】 現実空間画像において、仮想空間画像を重畳させない領域を適切に設定するための技術を提供すること。
【解決手段】 キー領域抽出部303は、現実空間画像において予め定められた画素値を有する画素で構成される第1の領域を抽出する。動きベクトル検出部304は、現実空間画像上の複数箇所における動きベクトルを求める。被写体領域抽出部305は、動きベクトルを用いて、第1の領域にマージする第2の領域を特定する。画像合成部308は、仮想空間画像を現実空間画像上に重畳させる際に、第1の領域と第2の領域とをマージした合成領域は、仮想空間画像の重畳対象外とすることを特徴とする。
(もっと読む)
画像処理方法及び画像処理装置
【課題】着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことが可能な画像処理方法等を提供する。
【解決手段】画像処理装置1は、分布算出部31、閾値決定部32、特性分離部33、及び計測部34の機能を備える。分布算出部31は、入力画像21を入力とし、画素値分布22及び画素値変化率分布23を出力する。閾値決定部32は、画素値分布22に基づく値を入力とする人工知能的アルゴリズムによって、閾値24を出力する。特性分離部33は、画素値分布22、画素値変化率分布23、及び閾値24を入力とし、これらを用いて入力画像21の領域を特性ごとの領域に分離し、特性領域25を出力する。計測部34は、特性領域25を入力し、特性領域25に基づいて計測処理を行い、計測結果26を出力する。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、距離情報の客観的な信頼度である評価値を提示できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部12と、メッセージの評価関数を計算する評価関数計算部13と、評価関数が最小となる距離を距離情報として推定する距離推定部14と、距離情報の信頼度を示す評価値を計算する評価値計算部15と、オクルージョンに起因する推定エラーが生じた領域を判定するオクルージョン領域判定部17と、テクスチャに起因する推定エラーが生じた領域を判定する無テクスチャ領域判定部19とを備える。
(もっと読む)
61 - 80 / 4,289
[ Back to top ]