
Fターム[5L096AA06]の内容
イメージ分析 (61,341) | 分析対象画像の物理的性質 (6,787) | 量子化レベル (4,407) | 濃淡(多値) (4,289)
Fターム[5L096AA06]に分類される特許
21 - 40 / 4,289
画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法
【課題】抽出したい対象エッジ近傍にノイズエッジが出るような場合でも、安定して検出対象エッジのみを選択することが可能な画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法を提供する。
【解決手段】入力画像に対してエッジ抽出を行い、抽出した複数のエッジから、その全ての交点位置を算出し、算出した全交点位置にて、予め登録しておいた検出対象エッジの交点位置、つまり検出対象ワークの角部を中心位置とした特徴点テンプレート画像を用いてパターンマッチングを行う。そして、全交点位置でのパターンマッチングの結果から、最も類似度の高かった交点位置を形成するエッジを、検出対象エッジに対応する検出対象とするエッジとして選択することができる。
(もっと読む)
対象物変化検出装置および対象物変化検出方法

【課題】車両周辺の対象物の変化を迅速かつ正確に検出できる対象物変化検出装置および対象物変化検出方法を提供することを課題とする。
【解決手段】本発明は、画像から対象物の属性を検出し、検出した対象物の属性内の当該対象物の種類を示す種類情報を取得し、取得した種類情報に基づいて対象物の変化検出に用いる変化検出用閾値を設定し、検出した対象物を含む画像から、設定した変化検出用閾値を用いて、対象物の変化を検出する。ここで、本発明は、検出した対象物の属性内の当該対象物の状態を示す状態情報を取得し、取得した種類情報および取得した状態情報に基づいて対象物の変化検出に用いる変化検出用閾値を設定する。
(もっと読む)
検出装置、及び、検出方法
【課題】検出対象物の検出処理速度を向上させること。
【解決手段】センサーの出力に対応する階調値を含む検出対象画像を生成する画像生成部と、前記検出対象画像から検出対象物を検出することに用いる学習済みの識別器を基準ウィンドウ毎に有する検出器と、を備え、前記画像生成部は、各基準ウィンドウの複数の倍率のサイズで前記検出対象画像を生成し、前記識別器は、前記基準ウィンドウにおいて分割された各領域に対応するサブ識別器を含み、前記検出器は、前記検出対象画像の倍率に応じた領域の前記サブ識別器に、前記検出対象画像における領域の階調値を入力し、前記サブ識別器の出力に基づいて前記検出対象画像における検出対象物の検出を行う、検出装置。
(もっと読む)
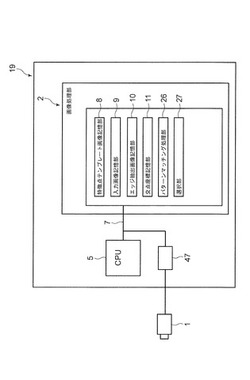
顔方向の検出方法および情報処理機器
【課題】顔の方向を検出してディスプレイを備えるコンピュータの電力を制御する。
【解決手段】カメラ・モジュールが撮像した画像データからディスプレイの正面方向に対する顔の方向を判断する(403)。斜め顔を検出したときは、ディスプレイのバックライトをオフにする(407)。入力デバイスからの入力がある間は、正面顔を検出しない場合であってもバックライトをオフにしない(421、423)。斜め顔(405)または非顔を検出してバックライトをオフにしても(407)、入力デバイスが操作されたとき(409)はバックライトをオンにする(431)。そのとき、一定時間以上連続して正面顔を認識しない限りディスプレイのオン状態を維持する(433)。バックライトがオフになってから正面顔を検出したときはバックライトを点灯する(411)。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】様々な位置姿勢や形状のワークの輪郭線を、精度良く抽出可能な画像処理装置及び画像処理方法並びに画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像取得部31と、元画像を2値化して元画像からワークの概略領域を特定する領域特定部32と、概略領域を膨張処理する領域膨張処理部34と、膨張処理された概略領域の境界線上に、複数の基準点を設定する基準点設定部35と、元画像から複数のエッジを抽出するエッジ抽出部33と、抽出された複数のエッジと基準点設定部35により設定された複数の基準点とを合成し、複数のエッジの中から複数の基準点のそれぞれに対して予め定められた位置にあるエッジを選択する輪郭エッジ選択部36と、選択された複数のエッジから連続したワークの輪郭線を抽出する輪郭線抽出部37と、を備えた画像処理装置。
(もっと読む)
球面勾配検出方法、エッジ点検出方法、球面勾配検出装置、エッジ点検出装置、球面勾配検出プログラム及びエッジ点検出プログラム
【課題】球面勾配ベクトルをより確実に算出可能な球面勾配検出方法、エッジ点検出方法、球面勾配検出装置、エッジ点検出装置、球面勾配検出プログラム及びエッジ点検出プログラムを提供する。
【解決手段】球面勾配算出方法は、複数の画素で離散的に表された離散球面に、撮影画像が投影された離散球面画像を形成する離散球面画像形成工程と、記離散球面画像を構成する複数の画素の各々の球面勾配ベクトルを、その球面勾配ベクトルを算出すべき画素の画素値と、その画素に隣接する画素の画素値と、その画素を構成する複数の辺の各々の長さ、その画素の面積と、その画素の中心からその画素を構成する複数の角部の各々への単位ベクトルとに基づいて算出する球面勾配算出工程と、を含む。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】一部の同一被写体の位置が異なる場合でも、画像の類似判定の精度向上を図ることができる。
【解決手段】ペア画像取得部41は、判定を行う複数の画像であるペア画像を取得する。対応点探索部82は、ペア画像取得部41により取得された複数の画像のデータについて、類似する複数の画素領域を夫々特定する。ベクトル算出部83は、対応点探索部82により特定された画像領域同士の距離を夫々算出する。閾値設定部84は、ベクトル算出部83により夫々算出された距離に基づいて、閾値を設定する。類似画像判定部44は、ベクトル算出部83により夫々算出された距離のうち、閾値設定部84設定された閾値以下の距離に対応する画素領域同士に基づいて、ペア画像取得部41により取得された複数の画像のデータが類似するか否かを判定する。
(もっと読む)
対象検知方法及び対象検知システム
【課題】本発明は、対象検知方法及び該方法が用いられる対象検知システムを提供する。
【解決手段】該方法は、同一シーンの深度図を撮像するとともに、撮像した深度図に基づいて該シーンの視差図を算出し、得られた視差図に基づいて前記シーンのV−視差図を取得し、V−視差図において道路に対応する斜線を検知するとともに、該斜線により視差図から道路を抽出することで、道路を含まないサブ視差図が得られ、V−視差図において縦線を検知し、前記サブ視差図から検知された各縦線に対応する全ての点を対象サブ視差図として抽出し、視差距離が所定値未満になり且つ重畳領域の比率が所定の閾値を超えた任意の対象サブ視差図同士の矩形フレームを1つの矩形フレーム対象領域に併合する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】様々な位置姿勢や形状のワークに対応可能で、かつ、迅速に最大内接円を抽出可能な画像処理装置、画像処理方法及び画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像抽出部31と、元画像抽出部31により取得された元画像を2値化して、元画像からワークWの概略領域を特定する領域特定部32と、領域特定部32手段により特定された概略領域を所定回数収縮処理する収縮処理部34と、元画像抽出部31により取得された元画像からワークWの輪郭線を抽出する輪郭線抽出部35と、輪郭線抽出部35により抽出されたワークWの輪郭線と収縮処理部34により収縮処理された収縮領域とを合成し、収縮領域の領域内で輪郭線に内接する最大内接円の中心点を探索して、中心点を中心としたワークWの内接円を抽出する最大内接円選定部36と、を備えた。
(もっと読む)
画像検索装置、画像検索方法およびプログラム
【課題】高速かつ高精度でテンプレート画像に類似する画像領域を検索することができる画像検索装置、画像検索方法およびプログラムを得る。
【解決手段】検索対象画像に対するテンプレート画像による検索位置を移動させつつ、各検索位置における検索対象画像とテンプレート画像との類似度を示す第1の類似度を算出する第1の算出手段と、第1の類似度のうち、類似度が高い方から順に所定の個数の第1の類似度について、前記所定の個数の第1の類似度それぞれが算出された検索位置を特定する特定手段(S2)と、検索位置に対して、第1の類似度より算出精度が高い第2の類似度を算出する第2の算出手段(S3)と、第2の類似度を閾値の初期値として、検索対象画像に対するテンプレート画像による検索を行う検索手段(S4)とを備えた。
(もっと読む)
注目度推定装置およびそのプログラム
【課題】映像コンテンツを視聴する人物の当該コンテンツに対する注目度を計測する注目度推定装置を提供する。
【解決手段】注目度推定装置1は、モーションキャプチャで計測された人物の骨格位置から身体動作量を計測する身体動作量計測手段11と、カメラ映像から人物の瞬目間隔時間を計測する瞬目間隔計測手段13と、カメラ映像から視線変動量を計測する視線変動量計測手段14と、身体動作量、視線変動量および瞬目間隔時間のそれぞれについて、予め定めた映像区間における統計特徴量を生成する統計特徴量生成手段30と、統計特徴量と注目度との対応関係を学習データとして予め記憶した学習データ記憶手段40と、学習データに基づいて、統計特徴量生成手段30で生成された統計特徴量に対応する注目度を、当該映像区間に対する注目度として特定する注目度特定手段50と、を備えることを特徴とする。
(もっと読む)
ジェスチャ認識装置、その方法、及び、そのプログラム
【課題】指先動きに応じた動作の誤判定を軽減できるジェスチャ認識装置を提供する。
【解決手段】取得した動画像からユーザの指先位置の軌跡を検出する検出部12と、前記指先位置の軌跡から送り動作か否かの判定を行うための有効範囲を設定する設定部15と、前記指先位置の軌跡が、前記有効範囲に含まれている場合に、前記指先位置の軌跡が送り動作か否かを判定する判定部14と、前記指先位置の軌跡が前記送り動作の場合に、前記送り動作から前記ユーザのジェスチャを認識する認識部16とを有する。
(もっと読む)
マーカの検出および追跡装置
【課題】カメラからマーカまでの距離が近傍から遠方までの広範囲に変化した場合においても、画像処理によりマーカを検出し、そのマーカを追跡する装置を提供する。
【解決手段】マーカとしては、赤外光を反射する反射シート1を下地として、マーカ模様2a,2bを印刷した透明シート2を下地に貼り付けて構成するか、又は、マーカ模様の切り抜きを反射シート1に直接貼り付けて構成し、撮影部としては、マーカを撮影するカメラの前に赤外線透過フィルタを設置すると共にカメラの近傍に赤外線照明手段を設置してなり、演算処理部としては、近距離のときにはカメラにより撮影された入力画像の画像特徴量によりマーカを検出する画像特徴量方法と、遠距離においてはカメラにより撮影された入力画像の赤外光を基にマーカを追跡する赤外光方法とを切り替えて適用する演算処理を行う。
(もっと読む)
画像処理方法、装置及びプログラム
【課題】本発明は、様々な画質(明るさのばらつきが大きい、エッジが不鮮明、ノイズが多いなど)の画像において、目的のオブジェクトを高精度で検出することができる新規な方法を提供する。
【解決手段】目的のオブジェクトの検出対象となる1つの画像に対して、予め定義されたn個の閾値を順番に設定してn回の2値化処理を実行し、各2値画像における連結画素領域の特徴量が所定の条件を満たすか否かを判定する。その結果、各2値画像において、所定の条件を満たさない領域の画素値をゼロクリアしたのちにこれらをマージして結果画像を生成する。
(もっと読む)
物体認識システム及び物体認識装置
【課題】ラインセンサ等の撮像装置を用いて取得した物体の撮像データを用いてその物体を認識する物体認識システムにおいて、物体の通過速度によって撮像データに含まれる物体の画像が歪むため対象物のテンプレートデータとのマッチングの精度が低下し物体の認識精度が低下するという課題があった。
【解決手段】物体認識部34は、速度検出部32で検出された物体の速度に応じて、撮像装置1、2で取得された撮像データに含まれる物体の画像をサイズ変更し、その変更後の撮像データとテンプレートデータとをマッチングして物体を認識するので、精度高く物体認識ができる。
(もっと読む)
運転支援システム、運転支援方法、及び、プログラム
【課題】比較的軽い処理で運転者の支援を行う運転支援システムを提供する。
【解決手段】 運転支援システム1は、動領域抽出によって、領域分割(撮影画像を画像要素に分割する処理)と、視差情報の抽出(視差マップの生成処理)とを行うため、ブロックマッチングを用いる方法に比べて、処理負荷を抑えることができる。また、右画像と左画像の同一画像要素を特定し、視差を算出する場合には、精細なカメラの校正と画像の補正が必要であるが、本運転支援システム1では、これらは不要である。さらに、本運転支援システム1によれば、動きや形の変化を推定するため、他の移動体に相当する画像要素の多様な動きや、形の変化にも対応できる。
(もっと読む)
画像処理装置、方法、及び画像表示装置
【課題】対象物の三次元位置を高精度で算出する。
【解決手段】実施形態の画像処理装置は、実施形態の画像処理装置は、第1取得部、第2取得部、第1設定部、第2設定部、第1算出部、及び第2算出部を備える。第1取得部は、対象物が複数の位置から撮像された複数の撮像画像を取得する。第2取得部は、前記対象物の仮三次元位置と、前記対象物の仮サイズを取得する。第1設定部は、実空間における前記仮三次元位置の近傍に少なくとも1つの探索候補点を設定する。第2設定部は、前記探索候補点を前記撮像画像に射影した射影位置毎に、前記対象物を探索するための探索窓であって、前記探索候補点の位置と前記仮サイズとに基づくサイズの前記探索窓を設定する。第1算出部は、前記探索窓内において、前記対象物が含まれるかどうかを示す評価値を算出する。第2算出部は、前記評価値に基づいて前記対象物の三次元位置を算出する。
(もっと読む)
情報処理装置、及び、情報処理方法
【課題】効率的に動領域抽出処理を行う動領域抽出プロセッサを提供する。
【解決手段】 動領域抽出プロセッサ5は、領域毎のアフィン動きモデルを推定する動きモデル推定処理と、領域を表すラベルを画素に割り当てる領域ラベリング処理との間の連携を強化し、境界更新処理と新領域検出処理の択一化により画素単位のパイプライン処理を実現し、要素処理(輝度勾配の算出など)の共通化と簡単化を行うことによって、比較例と比較して、アーキテクチャの50%削減、及び、4.2倍のスループットを実現している。
(もっと読む)
画像処理装置、及び画像処理方法
【課題】処理負担を軽減する。
【解決手段】実施形態の画像処理装置は、特徴算出手段と、探索手段と、推定手段と、生成手段と、重畳手段と、を備える。特徴算出手段は、第1のフレーム画像情報について、所定の表示領域単位で、表示領域に含まれる特徴情報を算出する。探索手段は、第1のフレーム画像情報と、第1のフレーム画像情報より後の第2のフレーム画像情報と、の間の、画素の動きを探索する。推定手段は、探索された画素の動きと、第1のフレーム画像情報の表示領域単位の特徴情報と、に基づいて、第2のフレーム画像情報の表示領域単位の特徴情報を推定する。生成手段は、第2のフレーム画像情報の表示領域単位の特徴情報に従って高周波成分を異ならせた高周波画像情報を生成する。重畳手段は、第2のフレーム画像情報に高周波画像情報を重畳する。
(もっと読む)
21 - 40 / 4,289
[ Back to top ]