
Fターム[5L096AA06]の内容
イメージ分析 (61,341) | 分析対象画像の物理的性質 (6,787) | 量子化レベル (4,407) | 濃淡(多値) (4,289)
Fターム[5L096AA06]に分類される特許
41 - 60 / 4,289
車両用外界認識装置およびそれを用いた車両システム
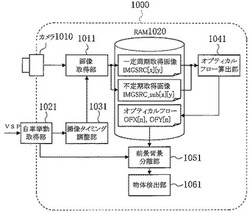
【課題】自車挙動に応じて撮像タイミングを調整することにより、一定の処理周期の中で自車速に応じて効果的、効率的に物体の動きを観測する車両用外界認識装置を提供する。
【解決手段】車両用外界認識装置1000は、カメラ1010等の撮像装置から画像を取り込む画像取得部1011と、カメラから画像を取り込むタイミングを調整する撮像タイミング手段1031とを有し、撮像タイミング手段で設定された一定周期での画像取り込みと、その周期の間に不定期での画像取り込みを行う。自車挙動取得手段1021で自車速を取得し、取得された自車速に応じて不定期での画像取り込みのタイミングを調整し、取り込まれた画像を用いて前景と背景を分離し、前景から衝突の可能性がある物体を検出する。
(もっと読む)
顔画像認証装置

【課題】表情、顔の向きの変動等により本人認証をしにくい状況でも本人受理を確保することができる顔画像認証装置を提供する。
【解決手段】認証候補人物特定手段326は、類似度算出手段325によって算出された類似度に基づいて前記複数の登録人物から認証候補人物を特定する。検出率算出手段327は、顔追跡手段322によって追跡された直近の複数の顔領域画像に対する類似度が最高となったフレームの割合である登録人物検出率を、認証候補人物について計算する。認証閾値決定手段328は、顔領域画像に含まれる顔が認証候補人物として特定された登録人物の顔であるか否かを認証するための基準である認証閾値を、登録人物検出率に応じて決定する。認証判定手段329は、類似度が認証閾値を超えた認証候補人物を監視領域内の人物の顔であると判定する。
(もっと読む)
画像処理装置、画像処理プログラム及び画像処理方法
【課題】鮮鋭且つ自然な画像を生成することを課題とする。
【解決手段】画像処理装置は、特徴量算出部と、生成部と、加算部とを有する。特徴量算出部は、所定範囲内での画素値の変化を表す特徴量を入力画像から算出する。生成部は、学習用画像の特徴量に対する高周波成分を含む学習用画像の特徴量の相対的な値の分布を表す確率分布と、特徴量算出部によって算出された特徴量とに基づいて、画素値の変化のパターンを表す所定画像パターンの重みを求め、求めた重みで該所定画像パターンを重み付けることにより、入力画像に対する高周波成分を生成する。加算部は、入力画像に、生成部によって生成された高周波成分を加算する。
(もっと読む)
画像信号処理装置
【課題】対象物の動き検出の誤判定を抑制する画像信号処理装置を提供する。
【解決手段】画像情報抽出部2が抽出した輝度平均値を参照し、現フレームの画像ブロックの輝度平均値と、現フレームの画像ブロックと同一地点に位置する参照フレームの画像ブロックの輝度平均値との差分が閾値以上であった場合に、現フレームの画像ブロックと参照フレームの画像ブロックとの間で輝度変化が発生したと判定すると共に、画像データの明るさの変化による輝度変化の変化量を差し引くためのオフセット値を算出するオフセット算出部3と、該オフセット値を考慮して、現フレームの画像ブロックの画素値と、現フレームの画像ブロックと同位置の参照フレームの画像ブロックの画素値との差分が閾値以上であるか判定を行い閾値以上であった場合に、当該画像ブロック内に動きを有する対象物が存在すると検出する動き検出判定部4とを備える。
(もっと読む)
ビデオ画像シーケンスにおいて移動物体を検出するための方法および装置
【課題】画像シーケンスにおいて移動物体を検出する方法を提供する。
【解決手段】a)画像シーケンスの一対の連続画像の一方の画像での特徴点を決定し、b)決定した特徴点を用いて、一対の画像の一方を、他方に投影する数学的変換を決定し、c)決定した変換により、互いへ変換される一対の画像の複数の画像の間の差として差分画像を決定し、d)決定した差分画像において特有の画像変化点を決定し、e)決定した特有の画像変化点から物点を決定するステップとを含む方法である。ステップd)は、d1)画像変化の閾値を確立し、閾値を超える画像変化点を、差分画像内のそれらの点として決定し、d2)所定の品質基準に基づいて、画像変化点の質を分析し、d3)品質基準が満たされている場合、d1)で決定した画像変化点をステップd)で決定する画像変化点として確立し、さもなければ、d1)で確立される閾値でd1)及びd2)を繰り返すステップを含む。
(もっと読む)
注視位置推定システム、注視位置推定システムの制御方法、注視位置推定装置、注視位置推定装置の制御方法、プログラム、及び情報記憶媒体
【課題】虹彩中心位置を検出したり、眼球中心の投影位置を推定したりすることなく、ユーザの注視位置を推定することが可能な注視位置推定システムを提供すること。
【解決手段】撮影部17は、表示手段に表示される画面を見るユーザの顔を撮影する。領域検出部32は、ユーザの顔領域と、ユーザの目以外の所定部位領域と、の少なくとも一方と、ユーザの目領域と、を撮影部17の撮影画像から検出する。面積/位置情報取得部60は、目領域の面積情報及び位置情報と、顔領域と所定部位領域との少なくとも一方の面積情報及び位置情報と、を取得する。注視位置推定部62は、面積/位置情報取得部60によって取得された面積情報及び位置情報に基づいて、ユーザが注視している画面内の位置を推定する。
(もっと読む)
画像処理装置およびデジタルカメラ
【課題】背景に動きがある場合でも適切に前景候補を判断し得る画像処理装置を提供すること。
【解決手段】画像処理装置は、nフレーム目の画像と、(n−1)フレーム目の画像において背景を示す画像とをそれぞれ用いて該nフレーム目の画像において背景を示す画像を合成する画像合成手段20と、(n+1)フレーム目の画像と、画像合成手段20により合成された画像とをそれぞれ用いて該(n+1)フレーム目の画像において前景を示す画像を生成する画像生成手段20とを備える。
(もっと読む)
勾配推定装置、勾配推定方法、及び勾配推定プログラム
【課題】路面が他の物体に覆われていても路面の勾配を算出することができる勾配推定装置、勾配推定方法、及び勾配推定プログラムを提供する。
【解決手段】特徴点抽出部は、撮影手段が撮影した画像上の特徴点を抽出し、物体検知部は、前記撮影手段が撮影した画像から物体を表す画像を検知し、勾配算出部は、物体検知部が検知した物体を表す画像における特徴点抽出部が抽出した特徴点の座標と、特徴点の座標の予め定められた時間における移動量と、に基づいて、物体が位置する路面の勾配を算出する。
(もっと読む)
特徴量生成装置、方法及びプログラム
【課題】高い認識精度を維持しつつ特徴量の次元数を削減することができる特徴量生成装置、方法及びプログラムを提供する。
【解決手段】特徴量生成装置は、入力画像を分割し、分割された各部分領域から、例えば勾配方向をヒストグラム化した特徴量を抽出し、分割された部分領域を複数選択し、選択された部分領域を処理単位として、部分領域の位置に応じた重み付けを行い、特徴量を次元ごとに合算することにより特徴量の次元削除を行う。
(もっと読む)
警告表示方法および警告表示プログラム
【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
車線認識装置
【課題】車線認識の誤検出を防止する車線認識装置を提供することを課題とする。
【解決手段】自車両が走行中の車線を認識し(例えば、画像による車線認識)、認識した車線の情報(例えば、車線幅Ws)を取得し、自車両が走行中の車線の構造情報(例えば、車線幅Wm)を取得し、認識した車線の情報と取得した車線の構造情報とを比較して車線認識が誤認識か否かを判定し、車線認識が誤認識と判定した場合、自車両に対する先行車両又は/及び後続車両を認識し、先行車両又は/及び後続車両の自車両に対する横位置Xcを取得し、先行車両又は/及び後続車両の横位置Xcに基づいて車線の右側の区画線と左側の区画線のうちのいずれの側の区画線を誤認識したかを判別し、その判別結果に応じて認識した車線の情報を修正する。
(もっと読む)
画像処理装置、方法及びプログラム
【課題】高速かつ自動的に画像から物体を切り出すことができる画像処理装置、方法及びプログラムを提供する。
【解決手段】画像処理装置は、画像について画素単位にクラスタリングを行うことにより複数のクラスタを生成し、生成されたクラスタの中から、クラスタに属する画素の位置に基づいて、前景の判定基準となる基準クラスタと、背景の判定基準となる基準クラスタとを選択し、生成されたクラスタを、基準クラスタとの類似度に基づいて前景又は背景に分類し、各クラスタの画素を、クラスタの分類結果に基づいて画素単位で前景又は背景に分類する。
(もっと読む)
画像処理装置及びその制御方法
【課題】 撮影機能を持つ携帯デバイスが増えているが、それぞれが持つ演算能力や搭載メモリは異なり、局所特徴量の算出処理やその特徴量記述サイズはこれらの機器のリソースに応じたものが好ましい。他方、PCやサーバーにおいては、携帯端末ほど局所特徴量の算出処理やその特徴量記述サイズの制約は受けない。この様な環境下において、検索精度を犠牲にすることなく、機器リソースに応じた特徴量記述サイズの制御が必要である。
【解決手段】 局所特徴点の個数が画像の局所特徴量記述サイズの支配的なファクターになると考え、局所特徴点および局所特徴量の再現性を評価し、再現性の高いものから順に局所特徴量記述サイズになるまで記述することで、局所特徴量記述サイズと検索精度の両立を図る。
(もっと読む)
自車移動推定方法および自車移動推定プログラム
【課題】画像内に大きな物体が存在しても正確に自車移動パラメータを推定することができる自車移動推定方法および自車移動推定プログラムを提供する。
【解決手段】本発明の一実施形態に係る自車移動推定方法は、車両に設けられたカメラが所定のフレーム周期で前記車両の周囲を撮像するステップと、前記カメラにより撮像された複数の画像間の動きベクトルを検出するステップと、検出された動きベクトルから自車の移動パラメータを求めるステップと、前記自車の移動パラメータを求める際に利用された前記複数の画像の撮像の後に前記カメラにより撮像された画像を用いて新たに動きベクトルを検出するステップと、前記新たに検出された動きベクトルのうち、前記自車の移動パラメータに対応する自車の移動ベクトルとの比較で所定の閾値以内であるものを背景ベクトルとして検出するステップと、この背景ベクトルを用いて新たに自車の移動パラメータを求めるステップと、を有する方法である。
(もっと読む)
画像ワープ方法及びそのコンピュータプログラム製品
【課題】画像ワープ方法及びそのコンピュータプログラム製品を提供する。
【解決手段】この画像ワープ方法は、元の視線角に対応する元の画像の複数の元の特徴点を決定するステップと、該元の画像内の該複数の元の特徴点の元の画素座標を計算するステップと、該複数の元の特徴点にそれぞれ対応する該元の画像の複数の新しい特徴点を決定するステップと、該元の画像上に射影された該複数の新しい特徴点の新しい画素座標を計算するステップと、該元の画像内の該元の特徴点の該元の画素座標をそれぞれ対応する該新しい特徴点の該新しい画素座標に近づけて、該元の画像を新しい視線角に対応する新しい画像に変形させるステップとを含む。
(もっと読む)
映像解析装置及びシステム
【課題】 多様な動的物体が現れるシーンを高速に解析する映像解析装置を提供する。
【解決手段】 入力された映像のフレーム画像102から、動的な物体が存在する領域を検出する動的物体領域検出部103と、この検出された動的物体領域検出部で検出された物体のカテゴリを判別する物体カテゴリ判別部104とを有し、この物体領域と物体カテゴリ判別部で判別されたカテゴリから、映像中の各座標において物体が現れる確率を表す「存在確率マップ」を生成し、それを時系列データで保存することで、一定のタイムスパンにおける各カテゴリの存在確率マップを生成する。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】カラー画像またはカラー画像から生成した白黒画像と単波長画像間での対応点検出精度を向上させる。
【解決手段】分光反射率画像生成部11で、カラー画像の画素値、RGBカメラ20の分光感度、観察照明光のスペクトル、及び被写体の統計的性質から求められた先見情報を用いて、ウィナー推定により画素毎の分光反射率を推定し、推定した分光反射率を画素値とする分光反射率画像を生成する。単波長画像生成部12で、生成された分光反射率画像、観察照明光のスペクトル、狭帯域バンドパスフィルタの分光透過率、及びRGBカメラ20の分光感度を用いた撮影シミュレーションにより、撮影単波長画像と同じ波長帯域の単波長画像を生成する。位相画像生成部13a、13b、相関画像生成部14、及び対応点検出部15で、生成された単波長画像と撮影された単波長画像との対応点を検出する。
(もっと読む)
IDカードの真贋判定システム、端末装置、IDカード。
【課題】近年、物理的特徴のコピー技術が発達しているので、それに対抗する認証システム及び端末装置が求められていた。
【解決手段】
IDカードの真贋判定システムにおいて、IDカードは、固有の物理的特徴を有した認証物を有し、端末装置には、ID入力部と、外光を遮蔽する暗空部と、カメラと、それぞれが異なる波長の光を発光する複数の光源を選択して発光させる複数の発光パターンを有し、この発光パターンによるチップ解析データ(画像データ)をチップデータとして予め記憶し、このチップデータと、新たに撮影されたチップ解析データによって認証物の真贋を判定する。
この判定時に、前記チップ解析データと前記チップデータとによる認証物の真贋の判定を前記発光パターンを変えて複数回行い、何れの判定においても前記認証物が適合した際に前記認証物が真と判定されるとした。
(もっと読む)
動きベクトル算出装置
【課題】映像信号の動きベクトル算出のための演算量を著しく低減するとともに、固定小数点処理をし易くする。
【解決手段】動画像の画像ブロック毎の動きベクトルを算出するために、3次元で定義された一〜三番目の固有値λ1〜λ3のうち、固有値λ1,λ2は近似する静止画の固有値λ'1,λ'2を代用することで、2次固定方程式で求め、精度を必要とする固有値λ3は、通常の分散式で求めている。このように、3次固定方程式を用いることなく動きベクトルを求めることで、演算量を少なくして時間内の処理と動きベクトルの算出精度を向上させることが可能となる。
(もっと読む)
車線判別装置
【課題】登坂車線を簡易に且つ確実に判別することができる車線判別装置を提供する。
【解決手段】車両2に搭載される車線判別装置であって、車両2の走行中に走行する道路上の車線境界線を含む車両2の前方の画像を所定期間連続して取得する画像取得手部30と、連続する画像の各画像内に同一の車線境界線が存在するか否かを判定する境界線判定部43と、同一の車線境界線が存在すると境界線判定部43が判定した場合、画像の車線境界線上において画像濃度が所定値以上変化する点を車線境界線のエッジ点として画像毎に抽出するエッジ点抽出部44と、抽出された車線境界線のエッジ点の数を画像毎に集計する集計部45と、連続する画像において、集計したエッジ点の数の所定期間における周期的な変化に基づいて、車線境界線が登坂車線と走行車線との車線境界線であるか否かを判別する境界線判別部46と、を備える。
(もっと読む)
41 - 60 / 4,289
[ Back to top ]