
Fターム[5L096DA01]の内容
Fターム[5L096DA01]に分類される特許
21 - 40 / 214
オブジェクト判別装置、方法、及びプログラム
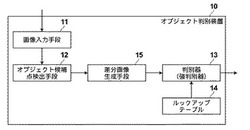
【課題】オブジェクト判別装置において、重複する差分計算を回避する。
【解決手段】判別器13は、それぞれが、入力画像における少なくとも1組の2点間の差分を求め、求めた差分に基づいて検出対象物の存在に関するスコアを求める複数の弱判別器を含む。判別器13では、複数の弱判別器がカスケード接続されている。差分画像生成手段15は、弱判別器で差分を求めるべき画像の2点間の位置関係に応じたずれ量を設定し、入力画像と入力画像を設定したずれ量だけずらした画像との差分画像を生成する。複数の弱判別器のうちの少なくとも一部は、差分画像を参照して差分を取得し、スコアを求める。
(もっと読む)
乗員頭部検知装置

【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
弧検出装置、弧検出プログラム及び携帯端末装置
【課題】弧検出にかかる処理負荷を軽減しつつ、適切に弧を検出すること。
【解決手段】画像を入力する入力部と、画像から複数の線分を検出する線分検出部と、複数の線分のうち、2つの線分のそれぞれの位置及び基準に対する角度に基づき、2つの線分が関連付けられるかを判定する判定部と、判定部の判定結果に応じて関連付けられた2つの線分に基づき、前記複数の線分のうち、該2つの線分を含む線分で近似される弧を検出する弧検出部と、を備える。
(もっと読む)
エッジ方向検出装置またはその方法
【課題】 信頼度の高いエッジ検出をする。
【解決手段】
差分総計値演算手段5は、指定された矩形領域について、前記組み合わせ画素記憶手段における組み合わせ画素の差分の絶対値を、各エッジ方向について総計した差分総計値をエッジ方向毎に演算する。中央近傍画素差分値演算手段11は、前記各エッジ方向について、中央近傍画素値と前記代表画素値との差分を、中央近傍画素差分値として演算する。エッジ検出信頼度演算手段13は、前記各エッジ方向について、前記中央近傍画素差分値および前記差分総計値に基づいて、エッジ検出信頼度を演算する。決定手段15は前記エッジ検出信頼度が高いエッジ方向が前記矩形領域におけるエッジ方向であると決定する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラムを記録した記録媒体
【課題】撮影された時系列画像から、人物らしい領域に対して個人が特定できないように画像変換を行う。
【解決手段】複数フレームの画像を元に、各画素の平均値を算出するステップと、平均値から大きく外れている画素値を取り除くステップと、該当画素から分散値を算出するステップと、分散値に対して、膨張処理、収縮処理を行い、分散値画像を生成し、多次元の変換式により変換を行うステップと、背景画像を更新するステップと、取得した画像から低周波数成分画像を生成するステップと、取得した画像と低周波数成分画像の差分から高周波数成分画像を生成するステップと、背景画像と取得した画像との差異から人物らしさを算出するステップと、高周波数成分画像の各画素の値を人物らしさの各画素の値を用いて抑制した抑制後の高周波数成分画像を生成するステップと、抑制後の高周波数成分画像と低周波数成分画像を合成して結果画像を生成するステップを有する。
(もっと読む)
端末装置、サーバ装置、およびプログラム
【課題】撮影オブジェクトを用いたナビゲーション情報を出力できない。
【解決手段】地図情報とオブジェクト識別子とオブジェクトの領域情報とを有する1以上のオブジェクト情報と、目的地点情報とを格納し、撮影した映像を出力する出力部と、端末装置の位置情報を有する端末情報を取得する端末情報取得部と、位置情報と方向情報と視野角とを、各オブジェクト情報の領域情報に適用し、1以上の撮影オブジェクトを決定する撮影オブジェクト決定部と、位置情報と目的地点情報とを用いて地図情報を経路探索し、経路情報を取得する経路探索部と、1以上の撮影オブジェクトのうちのいずれかのオブジェクトが、経路情報が示す経路に含まれる場合、オブジェクトを用いたナビゲーション情報を取得するナビゲーション情報取得部とを具備し、出力部は経路情報とナビゲーション情報をも出力する端末装置により、撮影オブジェクトを用いたナビゲーション情報を出力できる。
(もっと読む)
画像領域分割装置、画像領域分割方法および画像領域分割プログラム
【課題】画像に含まれるオブジェクトを色特徴に基づいて精度良く分離抽出する画像領域分割装置を提供する。
【解決手段】入力画像を色特徴に基づいて複数の小領域に分割する小領域分割部1と、小領域の各々を内部領域と外部領域とに対応付ける対象領域選択部2と、外部領域うち内部領域と色特徴が類似する領域を内部領域に統合して小領域拡張領域とする小領域拡張部30と、各小領域拡張領域の輪郭上の画素を抽出して輪郭情報を求める輪郭抽出部8と、輪郭情報の総和より各画素が輪郭となった頻度を測定して正規化した輪郭集中頻度を求める輪郭集中頻度測定部9と、輪郭集中頻度が所定基準を満たす画素をオブジェクト間境界候補と判定するオブジェクト間境界判定部10と、オブジェクト間境界候補より閉領域を抽出してオブジェクト間境界を得る閉領域抽出部20とを備えて画像領域分割装置を提供する。
(もっと読む)
画像処理装置、画像処理方法、および画像処理プログラム
【課題】対象画像から対象物の輪郭エッジを精度良く検出すること。
【解決手段】本発明のある実施の形態の画像処理装置1は、粘膜構造を撮像した管腔内画像の画素値をもとに、各画素の勾配強度を算出する勾配強度算出部16と、各画素の勾配強度をもとに輪郭候補エッジ位置を検出する候補エッジ検出部17と、各画素の勾配強度をもとに、輪郭候補エッジ位置の中から輪郭エッジ位置を選択する際に参照する参照範囲を設定する参照範囲設定部18と、参照範囲内の輪郭候補エッジ位置の中から1つを選択し、輪郭エッジ位置とする輪郭エッジ選択部19とを備える。
(もっと読む)
画像処理装置、画像処理方法
【課題】 表示画面内で映像酔いを引き起こす可能性のある部分領域に対して、映像酔い防止を目的とする補正処理を行うための技術を提供すること。
【解決手段】 表示画面におけるユーザの注視領域を特定する(S101)。注視領域に対して比較的大きく且つ画素値の分散値が閾値以上となる候補オブジェクトを特定する(S102〜105)。候補オブジェクトのうち、フレーム画像間の動きの周期が規定範囲内且つ動きの量が閾値以上となる補正対象オブジェクトを特定する(S106,S107)。補正対象オブジェクトが注視領域内に位置する更新対象フレーム画像上で補正対象オブジェクトを再配置させて表示画面に表示させる。
(もっと読む)
画像処理装置、画像処理方法、撮像装置、および画像処理プログラム
【課題】画像中の被写体の主要度をより的確に判定することを可能とする。
【解決手段】画像処理装置100は、時系列に撮像して得られた一連の複数フレームの画像を入力する画像入力部102と、画像入力部102で入力された複数フレームの画像から、主要度の判定をする対象である判定対象領域を抽出する判定対象領域抽出部104と、複数フレームの画像中における判定対象領域の出現頻度に基づいて判定対象領域の主要度を判定する判定部106とを備える。
(もっと読む)
複数形状の識別方法およびその装置
【課題】従来の光アナログ法は、画像情報の並列実時間処理には適するが光学装置の小型化が困難で装置構成に利便性を欠いていた。そのために複数画像の識別に、小型で並列画像処理を可能とする光アナログ画像処理法と装置を提供する。
【解決手段】識別物体導入手段または識別物体形状写出手段を、フーリエ変換レンズの前側で前焦点面に限定することなく設置し、多重マッチトフィルタ作成光学系の光路を短縮し、鮮明な光回折パターン取得光学系で多重マッチトフィルタの作成を容易にした。複数形状の同時並列実時間識別の小型簡便な方法と装置を提供した。
(もっと読む)
画像処理装置、画像処理方法、プログラムおよび記録媒体
【課題】空間的な連続性を確保した人物対象の検出を行うこと。
【解決手段】時系列に連続する画像データの画像内に存在する移動対象を当該画像データの分散値に基づき検出する画像処理装置において、前記時系列に連続する画像データに基づき画素毎の分散値を算出するとともに、各画素の分散値に対して当該画素の周辺にある画素の分散値に応じた割合で当該画素の分散値を膨張させる膨張処理と、各画素の分散値に対して当該画素の周辺にある画素の分散値に応じた割合で当該画素の分散値を収縮させる収縮処理を行い、前記膨張処理および収縮処理がなされた分散値を含む分散値画像データを生成する分散値画像生成部と、を備えることを特徴とする。
(もっと読む)
スクリーン領域検知方法及びシステム
【課題】スクリーン領域を検知する方法及びシステムを提供する。
【解決手段】該方法は、スクリーン領域を含む画像を取得し、画像における各画素の輝度値の変化により、スクリーン領域の候補エッジを取得し、候補エッジを直線に変換し、画像に2値化処理を施し、ターゲット領域と非ターゲット領域に分割し、最大のターゲット領域の境界画素点を取得し、すべての境界画素点を集合させて最大のターゲット領域の輪郭とし、輪郭上の各画素点から、変換された各直線までの最小距離及び変換された各直線の方向により、変換された各直線から輪郭上の直線を選択し、選択された直線の座標位置関係により、選択され直線を上、下、左、右の4つのグループに仕分け、4つのグループのうち同一グループにおける複数の直線を1つの直線にすることにより、スクリーン領域の4つのエッジを得る工程を含む。
(もっと読む)
係数学習装置および方法、画像処理装置および方法、プログラム、並びに記録媒体
【課題】画質を向上させるとともに、簡単な構成で多様な変換パターンに対応できる画質変換処理を実現することができるようにする。
【解決手段】回帰予測演算および判別予測演算において、入力画像の注目画素に対応する複数の画素の値またはそれらの値から得られる特徴量をパラメータとして与える。本発明では、入力画像の注目画素に対応する複数の画素の値と、それらの値から得られる3つの特徴量である4つの抽出値を用いる。4つの抽出値はそれぞれ、動き方向に従って抽出した画素値、抽出した画素値の最大値および最小値、抽出した画素値の動き方向に従った微分特徴量の絶対値、並びに抽出した画素値の動き方向に従った微分特徴量の絶対値の最大値とされる。
(もっと読む)
画像処理装置および方法並びにプログラム
【課題】画像に含まれる線状構造物と面状構造物との誤判別を防止する。
【解決手段】フィルタリング部32が、画像中の任意の画素位置における画素値の二階偏微分行列および一階偏微分値を算出する。評価部34が、二階偏微分行列値に基づいて、画素位置における線状構造らしさおよび面状構造らしさの評価値を算出する。この際、一階偏微分値が大きいほど評価値を小さくする。
(もっと読む)
画像処理システム及び画像処理方法
【課題】テンプレート・マッチングのような画像処理に要する最大処理時間を短縮することが可能な画像処理システムを提供する。
【解決手段】画像処理システムは、探索対象画像の中からテンプレート画像と一致する一致領域を探索する。操作処理部501と、抽出処理部502と、計算処理部503と、特定処理部504とを具備する。操作処理部501は、連続した複数の第1ビットの各々を順次操作して、不連続な複数の第2ビットの各々を順次生成する。抽出処理部502は、順次生成される第2ビット毎に、探索対象画像の中の連続的な探索順の位置のうち、第2ビットに対応した探索位置で部分領域を抽出する。計算処理部503は、抽出された部分領域とテンプレート画像との類似性に関する指標を算出する。特定処理部504は、複数の第2ビットに対応した複数の部分領域について算出された複数の指標に基づいて、複数の部分領域から一致領域を特定し、一致領域の位置としての合致位置を特定する。
(もっと読む)
通路検出方法、装置、及びプログラム
【課題】轍の検出精度を高めることによって、従来よりも精確に通路を検出することができる通路検出方法、装置、及びプログラムを提供する。
【解決手段】通路検出装置1は、入力画像に対する画像処理を行って入力画像に含まれる通路領域を検出するものであり、入力画像に含まれる通路領域のおおよその位置を示す中心ブロックを抽出する中心ブロック抽出部と、入力画像に対して複数種類のフィルタ処理を行って入力画像の評価に用いる特徴量をフィルタ処理の種類毎に求める特徴量算出部32と、中心ブロック抽出部31で抽出された中心ブロックにおける特徴量と同様の特徴量を有する領域を入力画像から抽出することによって通路領域を検出する通路領域検出部34とを備える。
(もっと読む)
ヒューマンインタラクションによる軌跡に基づいたシステム
ユーザインタフェースによるヒューマンインタラクションを取り入れた、ビデオ系列において動くオブジェクトを検出する軌跡に基づいた技術を使用する方法及び関連する装置に関する。本方法は、ビデオフレームにおいて、接続されたコンポーネントのセットを識別及び評価し、接続されたコンポーネントの特徴を予め決定された基準と比較することで接続されたコンポーネントのリストをフィルタリングし、複数のフレームにわたり候補となる軌跡を識別し、候補となる軌跡を評価して選択された軌跡を決定し、インタフェースの使用により誤った軌跡を除き、評価及び除くステップに応じて、ビデオ系列における画像を処理する。  (もっと読む)
(もっと読む)
動きベクトル検出装置、動きベクトル検出方法およびプログラム
【課題】動きベクトル検出装置が動き探索を行う際に、擾乱の影響を受けにくくし、かつ、動き探索の演算量を削減する。
【解決手段】一次探索器6がマクロブロック単位で一次探索を行い、近傍探索器8は、一次探索の結果得られる一次動きベクトル周辺およびゼロベクトル周辺等の近傍探索を、マクロブロックサイズ未満のブロック単位で行う。ブロック統合器11は、ブロック毎の動きベクトルに応じて互いに隣接するブロックを結合することにより、マクロブロックに適用するブロックサイズを決定し、各ブロックの動きベクトルを決定する。
(もっと読む)
マップ作成方法および装置とそのマップを利用した定位方法
【課題】レンジデータと画像特徴点とを連合させるマップ作成および定位方法を提供し、作成された環境デジタルマップをパーソナルナビゲーション装置(PND)にも提供できるようにする。
【解決手段】マップ作成方法が提供される。環境が走査されて環境障害物の深さ情報を獲得する。環境の画像が捕捉されて画像平面が生成される。環境障害物の深さ情報が画像平面に投影されて、投影位置を獲得する。少なくとも1つの特徴ベクトルが、画像平面中の各投影位置周辺の予め決定された範囲から計算される。環境障害物の深さ情報および特徴ベクトルが合併されて、一時点に対するサブマップが生成される。全時点でのサブマップが連合されてマップを生成する。また、マップを使用する定位方法も提供される。
(もっと読む)
21 - 40 / 214
[ Back to top ]