
Fターム[5L096EA06]の内容
Fターム[5L096EA06]に分類される特許
41 - 60 / 122
画像分割方法

【課題】画像分割方法を提供する。
【解決手段】本発明の実施の形態は、画像を分割する方法を説明する。画像の初期分割を実施して、先行する分割領域を生成し、該先行する分割領域の形状事前分布に基づいて、空間ランダムウォークを使用して画像を反復的に分割して、次の分割領域を生成する。次の分割領域を先行する分割領域と比較し、先行する分割領及び次の分割領域が収束するまで、分割及び比較を繰り返す。その後、次の分割領域を最終分割領域として選択する。
(もっと読む)
画像処理装置

【課題】複数フレームに跨る画像ブロックの動き検出する場合に、その動き検出の算出を速めて、画像処理を高速化できる画像処理装置を提供する。
【解決手段】特徴点マップ15をラスタ方向に検索し、そこに特徴点が存在している場合には、その特徴点の識別番号を利用し、動き情報テーブル17の識別番号に該当するテーブルブロックを見いだす。このテーブルブロックには、次追跡ブロックID(即ち次に処理すべきテーブルブロックを示す番号)が記憶されているので、次に、次追跡ブロックIDが示すテーブルブロックのデータ(特徴点座標や次追跡座標)を利用して、更に次追跡座標や動きベクトルを算出することができる。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム
【課題】動画像に適用した場合に、短時間で、時間方向に安定した処理結果を得ること。
【解決手段】本発明に係る画像処理装置1は、現フレーム画像と前フレーム画像の相違度に基づいて、現フレーム画像の各ノードの信頼度を算出するノード信頼度算出部14と、前フレーム画像の各領域に付与したタグを、対応する現フレーム画像の各ノードに対して割り当てるノードタグ割り当て部15と、現フレーム画像に含まれる2つのノードが同一の領域に含まれるか否かを判定する評価基準に基づいて、2つのノードを含む領域を算出する領域算出部16を備え、領域算出部16は、2つのノードに対して割り当てられたタグが同一のタグであるか否かを判定し、タグの一致状況とノードの信頼度に応じて、評価基準を補正する。
(もっと読む)
三次元的動き検出装置、三次元的動き検出方法及び三次元的動き検出プログラム
【課題】1台のカメラで撮影された動的対象物の三次元的な動きを精度よく安定的に検出する三次元的動き検出装置、三次元的動き検出方法及び三次元的動き検出プログラムを提供することを課題とする。
【解決手段】座標変換モデルをオプティカルフロー法に融合しているので、1台のカメラで撮影された二次元画像からであっても動的対象物の動きを三次元的に検出することが可能となる。また、三次元的な動きを検出する際に、動的対象物の動きに対する回転成分及び並進成分とを拘束条件に加えているので、動的対象の動きを精度よく安定的に検出することが可能となる。
(もっと読む)
トリミング制御装置及びトリミング制御プログラム
【課題】表示画面が小さい端末等にコンテンツを表示する場合、自然なカメラワークを実現し、視認性を損なわない画面を表示可能なトリミング制御装置及びトリミング制御プログラムを提供する。
【解決手段】トリミング制御装置10が外部から映像及び参照データを入力すると、注目オブジェクト座標検出部12は、入力した参照データに基づいて注目オブジェクト座標を検出する。平滑化処理部13は、注目オブジェクト座標を入力すると、所定フレーム数のオブジェクト座標を記憶する。そして、平滑化処理部13は、記憶したオブジェクト座標に基づいて移動平均を算出し、この移動平均の値をトリミング座標に決定する。トリミング処理部11は、入力した映像のオリジナル画面から、トリミング座標を中心とした所定の大きさの画面を切り出し、トリミング画面を生成する。
(もっと読む)
画像処理装置、画像処理方法およびプログラム
【課題】 画像の中から画素値が急激に変化する点を特徴点として抽出し、この特徴点及び/又は特徴点に関する情報を用いて画像処理をするシステムにおいて、コーナから抽出した特徴点と、コーナと比べて抽出される再現性の低いコーナ以外のエッジから抽出した特徴点との区別をしていなかった。
【解決手段】 入力画像からエッジを抽出し、エッジからセグメントを抽出し、セグメントごとに勾配方向を計算して勾配方向グラフを生成し、この勾配方向グラフを調べて勾配方向の変動点を特徴点として抽出するようにした。
(もっと読む)
パターンマッチング方法、及び画像処理装置
【課題】
本発明は、三次元的に形成されたパターンの深部の状況や試料の帯電の状況に依らず、安定した位置合わせ、或いは特定層の選択的な情報抽出を行うことを目的とした方法、及び当該目的を達成するための装置の提供を目的とする。
【解決手段】
上記目的を達成するために、パターン上部の形状が選択的に表現された第1のテンプレートを用いて、複数層が表現された画像情報上で第1のパターンマッチングを行う方法、及び装置を提案する。また、特定層の選択的な抽出を行うために、上記複数層が表現された画像情報、或いは形状情報から、パターン上部の形状に関する情報を差し引く方法、及び装置を提供する。
(もっと読む)
肌のシミュレーション画像形成方法
【課題】コンピュータを用いた画像処理により、肌の自然な質感や色を保持しつつシミ等の色ムラを増減させたシミュレーション画像を形成する。
【解決手段】被験者の肌について内部反射光画像と表面反射光画像を取得し、内部反射光画像から独立成分分析により少なくとも1つの色素成分の成分画像(例えば、メラニン成分内部反射光画像)を抽出し、抽出した色素成分画像を複数の空間周波数帯域に分解し、該一又は複数の帯域の画像について、画素強度の度数分布求め、
その度数分布を、ピークを含む中央部領域とその外側の端部領域の少なくとも2つの領域に分け、
端部領域の度数分布を変化させ、次いで各画像を再合成することにより肌の色ムラ又はテクスチュアを変化させたシミュレーション画像を形成する。
(もっと読む)
車両環境認識装置
【課題】車両の周囲における光照射状態の相違の影響を軽減または解消して、色認識精度の向上を図ることができる装置を提供する。
【解決手段】車両環境認識装置10によれば、色付きの原画像において車両1の前方道路に相当する基準領域Sを構成する画素のRGB値の平均値を当該基準領域Sの実空間における標準的な色、すなわち、道路の標準的な色を表わすRGB値に一致させるような補正係数が算出される。そして、色補正画像から指定色を有する領域が抽出されることにより、標準的な光照射状態において指定色またはこれに近い色を有する領域が高精度で抽出されうる。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】動画像に含まれるジャーキネス劣化を低減させる画像処理装置を提供する。
【解決手段】
記録媒体200に記録された動画像から、動きベクトルを生成する動きベクトル生成処理部140と、代表的動きベクトルを求める代表的動きベクトル生成処理部170と、動いている画素を判定する動きピクセル判定処理部180と、生成された動きベクトルに応じて、動きぼけを付加する動きぼけ付加処理部150とを備え、動きぼけを付加する動きぼけ付加処理部150は、動きベクトルに近い代表的動きベクトルを基準ベクトルとしてボケを付加することにより、より自然にジャーキネス効果を低減した動画像を出力できるようにする。
(もっと読む)
エッジ抽出装置、測量機、およびプログラム
【課題】対象物の輪郭以外のノイズ検出を低減すると共に、その操作性を向上する。
【解決手段】
エッジ抽出装置は、画像からエッジ強度を算出してエッジ検出を行うエッジ検出部と、エッジ検出部が検出したエッジをラベリング処理し、かつ、エッジの長さを求めるラベリング処理部と、ラベリング処理部が求めたエッジの長さとエッジ検出部が算出したエッジ強度とを対応付けた値によってエッジの強調処理を行うエッジ強調処理部と、エッジ強調処理部によって強調された画像に対して、調整可能とされる閾値により2値化処理を施し、エッジを抽出するエッジ抽出部とを備える。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、記録媒体、及び画像処理システム
【課題】画像データの円中心を求める場合に、円の中心を精度良く、短時間で決定し得る画像処理装置・方法・プログラム、記録媒体、及び画像処理システムを提供する。
【解決手段】画像データに対してハフ(Hough )変換を行い、検出した円の中心位置を仮設定し(S2)、仮設定した円の中心位置の座標を中心とする所定の範囲を設定し、所定の範囲に存在する各座標を原点として検出した円を極座標変換する(S5)。各座標を原点として検出した円を極座標変換したときに得られる円の半径rを中心角θ軸方向に各々1次元投影し(S6)、1次元投影にて得られる円の半径rにおける中心角θ軸方向の分布から、円の半径rの中心角θ軸方向に対する直線性を示す評価値を求める(S7)。所定の範囲に存在する各座標を原点として検出した円を極座標変換して求めた円の半径rの分布からの各評価値の最も高くなる原点の座標を円の中心位置として決定する(S9)。
(もっと読む)
車両用画像処理装置、車両、及び車両用画像処理プログラム
【課題】車両の周辺を撮像した画像を、路面上の局所的な輝度や色の変動の影響を低減するように処理して、該画像から車両が走行している道路上のレーンマークを精度良く検出可能な車両用画像処理装置、車両、及び車両用画像処理プログラムを提供する。
【解決手段】車両用画像処理装置10は、取得された画像に対して、所定方向の幅がレーンマークの画像部分の該所定方向の幅よりも大きい所定範囲内となるカーネルのサイズを設定するカーネル設定手段12と、取得された画像を設定されたサイズの平滑化用のカーネルを用いたフィルタ処理により平滑化する平滑化手段13と、平滑化された後の画像に対する取得された画像の各画素の画素値の変化度合を算出する変化度合算出手段14と、取得された画像の、変化度合が所定値以下となる画素の画素値を、平滑化された後の画像の該画素に対応する画素の画素値に置換する画素値置換手段15とを備える。
(もっと読む)
動的特徴検出の方法およびシステム
センサの視野内にある対象物の物理的特徴の動的特徴検出のためのシステムおよび方法が開示される。動的特徴検出は、複数のアラインメントに対応する複数の画像を捕捉および処理するために、対象物または材料の視野内の運動および/または視野を横切る運動を使用することにより、物理的特徴とピクセルグリッドとの偶発的アラインメントの効果を実質的に低減する。ある特徴の位置、重みおよびその他の属性の評価は、当該特徴が視野内を移動して複数のピクセルグリッドアラインメントに現れるときの当該特徴の外観の解析に基づいている。この結果得られる信頼性および正確性は先行技術の静的特徴検出システムおよび方法より優れている。 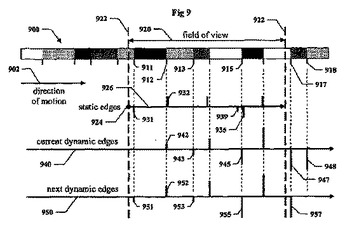 (もっと読む)
(もっと読む)
車両用画像処理装置、車両、及び車両用画像処理プログラム
【課題】車両の周辺を撮像した画像を、路面上の輝度や色の変動の影響を低減するように処理して、該画像から車両が走行している道路上のレーンマークを精度良く検出可能な車両用画像処理装置、車両、及び車両用画像処理プログラムを提供する。
【解決手段】車両用画像処理装置10は、撮像手段2を介して取得された画像に対して、レーンマークの幅と道路の幅との間と想定される幅を有する複数の平滑化用のカーネルを設定するカーネル設定手段12と、取得された画像を、前記設定された平滑化用のカーネルを用いたフィルタ処理により平滑化する平滑化手段13と、取得された画像と平滑化後の画像との間で、各画素の画素値の変化量を算出する変化度合算出手段14と、取得された画像の、変化量が所定値以下となる画素の画素値を、予め定められた一定値に変換する画素値置換手段15とを備える。
(もっと読む)
指紋プリビュー品質ならびに細分化
【課題】品質指標は、最大解像度を使ったスキャンイングが要求されるので、ライブスキャン型装置のプリビュー機能用には適さない。そこで、プリビュー機能を持つライブスキャン型装置を提供する。
【解決手段】解像度に関係なく、画像の品質をリッジフローに基づいて決定するものであって、リアルタイムで処理でき、指紋の細分化等の細分化を含み、これにより、4指の平面、2本の親指又は全指の画像を有する独立した指紋について画像品質の判断を提供するものである。指紋品質モジュールは、一以上のスキャン装置から、一以上の品質、掌性、履歴情報分析およびバウンディングボックスの割り当てについて後に判断が行われる、リッジフローを含んだ画像を受け取る。
(もっと読む)
デジタル画像の赤目欠陥の検出
目を含んでいるデジタル画像の赤目欠陥を検出する方法は、デジタル画像を強度画像に変換し、該強度画像を各々局所的な最大の強度を有するセグメントへセグメント化することを含む。別個に、元のデジタル画像は、相対的に高い強度及び予め定められた範囲内にあるサイズの領域を識別するために閾値化される。これらのうち、実質的に最大の平均強度を有している領域が選択され、また、強度画像のセグメント化から、当該選択された領域に最大値が位置するセグメントが識別される。 (もっと読む)
画像処理装置および照合システム
【課題】記録媒体に含有される被検出体の分布の特徴量を検出して、それを記憶されているものと照合する。
【解決手段】制御部は、オブジェクトの総数が一致または1個だけ異なる用紙IDを特定し(Sd1)、これらのうち、印刷物から算出した「領域別本数」、「重なり本数別本数」おおよび「角度範囲別本数」が一致する領域数および項目数の一致数を算出する(Sd3〜Sd6)。制御部は、この一致数が閾値を以上で(Sd7;YES)、かつ、一致数が最大値であれば(Sd8;YES)、この用紙IDを特定する(Sd9)。制御部は、すべての用紙IDとの照合が終了すれば(Sd2;YES)、最後に選択した用紙IDに対応する用紙が印刷物と同一物であると判断する(Sd11)。
(もっと読む)
画像処理装置およびプログラム
【課題】多値画像からの罫線抽出時に、偽の罫線を排除して過抽出を抑制し、適正な罫線のみを複雑な計算を用いることなく効率的に抽出できるようにする。
【解決手段】多値画像取得部9が取得した多値画像から二値画像生成部11により二値画像を生成し、罫線候補抽出部12によって二値画像から罫線を構成し得る画素である罫線候補画素を抽出し、エッジ検出部13が罫線候補画素の周囲のエッジに関する情報を同じ多値画像の対応する座標位置から検出し、罫線候補の境界画素毎に空間フィルタを施し、その絶対値が所定の閾値より大きいものをエッジと判断する。罫線取得部14では、エッジと判断された画素数が罫線候補画素の周囲の境界画素総数に対して一定の割合に達していれば、正当な罫線と判断して取得し、罫線登録部15に登録する。
(もっと読む)
画像特徴抽出装置,画像特徴抽出方法,画像特徴抽出プログラム及びそのプログラムを格納した記録媒体、画像類似度計算装置,画像類似度計算方法,画像類似度計算プログラム及びそのプログラムを記録した記録媒体
【課題】特徴抽出におけるエッジ処理において、照明の変動を受けやすい、はずれ値の影響を受けやすい、精度が向上しない。
【解決手段】入力画像データD11に対して画像補正を行い、該補正された画像を出力する(11)。次に、前記補正された画像の各画素位置に対して、方向毎の変化をグラジエントベクトルとして計算し出力する(12)。そして、前記計算されたグラジエントベクトルに対して、グラジエントベクトルの大きさ,向きのいずれかを変化させる非線形処理を行って画像特徴D12を抽出する(13)。
(もっと読む)
41 - 60 / 122
[ Back to top ]