
Fターム[5L096EA27]の内容
Fターム[5L096EA27]に分類される特許
101 - 119 / 119
生体情報の特徴量変換方法および生体認証システム
【課題】
指紋認証に適用可能な、精度の劣化のないキャンセラブル生体認証を実現する。
【解決手段】
キャンセラブル生体認証における指紋情報の変換手段として、指紋特徴点の座標と方向の対称変換と、座標の回転変換と、方向の回転と、特徴点種別の反転を組み合わせた変換を用いる。また対称変換の有無と、座標の回転角度と、方向の回転角度と、特徴点種別の反転の有無を、変換パラメータとして用いる。この変換は指紋照合アルゴリズムの特徴量空間における等長変換であり、従って二つの特徴量を同一の変換パラメータで変換しても特徴量同士の照合結果は変化せず、従って精度劣化のないキャンセラブル指紋認証が実現される。
(もっと読む)
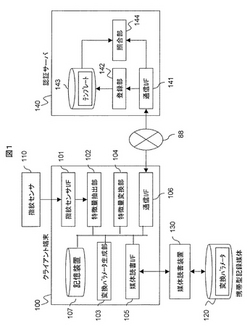
車両周辺監視装置

【課題】車両に搭載された撮像手段の取り付け角度を正確に求める。
【解決手段】ナイトビジョンシステム10におけるECU14は、仮ターゲットを撮像した小画像を赤外線カメラ16R、16Lからの距離に応じてテンプレートTP1〜TP6として6枚記憶し、実際の対象物距離に応じてテンプレートTP1〜TP6から1つのテンプレートを選択する。選択されたテンプレートを用いて、赤外線カメラ16R、16Lで撮像された画像に対してテンプレートマッチングを行い、検査用のターゲットの座標を算出する。算出されたターゲットの座標と予め記憶された基準座標とを比較して赤外線カメラ16R、16Lの取り付け角を求める。
(もっと読む)
2次元画像の表現方法、画像表現、画像の比較方法、画像シーケンスを処理する方法、動き表現を導出する方法、動き表現、画像の位置を求める方法、表現の使用、制御デバイス、装置、コンピュータプログラム、システム、及びコンピュータ読み取り可能な記憶媒体
【課題】画像シーケンス又はビデオシーケンス中のフレーム間の主要な動きを推定する。
【解決手段】2次元画像を表現する方法は、画像を少なくとも1つの軸上に投影することによって画像の少なくとも1つの1次元表現を導出すること、及びこの1次元表現にフーリエ変換を適用することを含む。この表現は、画像間の主要な動きの推定に用いることができる。
(もっと読む)
動体認識装置
【課題】 動画像中に映された人物等の動体をその同一性を保持して追跡記録する。
【解決手段】 カメラCで撮影された動画像から、特徴抽出手段2が人物画像領域M1、M2や人物を特徴付ける顔画像部分T1、T2を抽出し、位置検出手段3が当該人物の位置情報を時系列に検出する。そして、判定手段4が人物画像領域M1、M2毎の顔画像部分T1、T2の同一性を判定し、追跡情報保持手段5が同一性のある人物(人物ID)と時系列位置情報とを対応付けてデータベース6に保持する。これにより、動画像中に複数の人物が映されている場合でも各人物を識別した追跡情報を得ることができる
した追跡情報を得ることができる。
(もっと読む)
撮像素子の画素中心位置の検出方法
【課題】 精密に撮像素子の有効画素中心位置を検出できる撮像素子の画素中心位置の検出方法を提供する。
【解決手段】 素子チップの4つの素子チップ辺を画像認識する工程(S1)と、4つの素子チップ辺近傍の濃淡画像の画素間を補間する工程(S2)と、素子チップ辺上の複数のエッジ位置をサブピクセル単位で4辺分割り出す工程(S3)と、複数のエッジ位置を通る画像座標上における4つの素子チップ辺の直線の方程式を割り出す工程(S4)と、直交する2辺の交点とそれに対向する他の2辺の交点との座標をそれぞれ求める工程(S5)と、2つの交点の座標の中心を素子チップの中心として認識する工程(S6)と、素子チップの中心と素子チップ上の有効画素部の中心との位置の差に予め測定されたカメラの倍率をかけた量だけ素子チップの中心をオフセットさせ、この位置を撮像素子の画素中心位置として認識する工程(S7)とを有することを特徴とする。
(もっと読む)
開閉眼判定装置
【課題】 開眼時に閉眼であると誤判定しないようにすることが可能な開閉眼判定装置を提供する。
【解決手段】 開閉眼判定装置1は、上瞼の座標群とこの座標群に近似された二次以上の曲線との相関値を求める。そして、開閉眼判定装置1は、相関値が基準値よりも高い場合、基準値以下の場合よりも、開閉眼判定閾値を大きく設定する。次いで、開閉眼判定装置1は、上瞼の曲率を求めて、この曲率が開閉眼判定閾値より大きいときに開眼と判定し、開閉眼判定閾値以下のときに、閉眼と判定する。ここで、相関値が小さい場合には、上瞼の曲率の検出精度が落ちる。このため、開眼時にあっては上瞼の曲率を小さく検出してしまうことがあるが、開閉眼判定閾値についても小さくしているため、開眼時に閉眼と誤判定してしまう可能性を減じることができる。
(もっと読む)
画像解析方法及び装置、画像処理方法及びシステム、これらの動作プログラム
【課題】ページ厚さがある文書や枠板を有するホワイトボードが被写体とされた画像であっても、正確に文書領域やホワイトボード領域を検出できるようにする。
【解決手段】 ホワイトボードを含む解析対象画像Sから、ホワイトボードに由来するエッジ画像を作成すると共に、そのエッジ画素についてハフ変換投票処理を行い傾き−切片座標データを求める。該データから、累積度数が所定値以上であって、且つ傾きが所定値以内であるとの条件を満たす直線情報h11,h12を直線候補として抽出し、さらに累積度数が最大となる直線情報を求める。そして、前記累積度数最大直線よりも解析対象画像の中心側方向の所定値Kc以内に存在する直線h12を検出して第1辺を求める。同様にして、他の辺も特定し、その4辺で区画される領域を特定領域として抽出する。
(もっと読む)
データ処理装置及びプログラム
【課題】撮像手段により撮像された被写体の移動に基づいて、従来のポインティングデバイスに近い操作指示を行う。
【解決手段】撮像部14の光軸方向と垂直な方向(X軸方向又はY軸方向)における指の移動を検出し、この移動に基づいて、表示画面上のポインタの表示位置を移動させる。また、撮像部14の光軸方向(Z軸方向)における指の移動を検出し、指が撮像部14に近づき、規定の範囲内に入った場合に、表示画面上のポインタの表示位置で指定されている項目の選択操作を検出する。
(もっと読む)
画像測定装置
【課題】 エッジの位置検出の精度を向上させることができる画像測定装置を提供する。
【解決手段】 線ツール69を置きたい位置として入力された座標が、線ツール69が延びる方向の直交方向で隣り合うピクセルの一方を示す第1座標(26、0)と他方を示す第2座標(27、0)との間のピクセル間座標(26.5、0)か否か判断される。ピクセル間座標の場合、第1座標(26、0)及び第2座標(27、0)を始点にして、それぞれ、エッジEの位置を検出する。これらを基にして、線ツール69を置きたい位置の座標を始点にした場合のエッジEの位置を演算する。
(もっと読む)
画像領域分類装置
【課題】撮像画像上における同一物が写されている領域を判定する。
【解決手段】追跡可能領域検出部30は、撮像部10により撮像された画像を複数の領域に区分し、各領域ごとに、移動体を追跡可能な追跡可能領域を検出する。高さ比算出部60は、追跡可能領域検出部30により検出された異なる2つの追跡可能領域の撮像画像上のy座標の比を算出する。領域分類部70は、高さ比算出部60によって算出されたy座標の比の時間変化量が所定のしきい値以下の領域を同一物が写っている領域として検出する。
(もっと読む)
制御システム
【課題】顔画像の認識結果に基づいてMIDIメッセージを生成し、当該MIDIメッセージによりMIDI機器を制御することで、当該顔画像の変化に対応した音声出力をなすこと。
【解決手段】本発明の制御システムは、入力された画像データの中で顔の所定部位の位置を検出し数値データとして出力する第1の機能と、この数値データを指定されたアルゴリズムを利用して変換処理しMIDIメッセージを生成する第2の機能と、予め所定の表現効果や所定のMIDI機器の操作に係るパラメータをプリセットする第3の機能と、を備え、上顔の所定部位の位置の変化に基づいてMIDI機器の音声出力を制御する制御手段を有し、制御手段は、MIDIメッセージの少なくとも一部を顔の所定部位の位置の変化に連動して動的に変更し、上記第3の機能により所定のパラメータが指定された場合には上記MIDIメッセージの生成に際して当該パラメータを参照する。
(もっと読む)
線状光データ処理装置、表面形状測定システム、線状光データ処理方法、線状光データ処理装置の制御プログラム、および、コンピュータ読み取り可能な記録媒体
【課題】 光切断法を用いて、計測精度よく広範囲の形状計測と表面粗さ計測とを同時に実現することができる線状光データ処理装置を提供する。
【解決手段】 座標特定部22が、画像データにおける線状光の長手方向に沿ったへり部分の画像面での2次元座標を特定する。表面形状算出部23は、座標特定部22が特定した画像面での2次元座標を基に光切断法により物体表面の3次元座標を求め、物体表面の形状を算出する。
(もっと読む)
動き検出方法及び装置,プログラム,車両用監視システム
【課題】 演算量を削減でき、しかも複数の検出対象が存在しても個々の動きを検出可能な動き検出方法及び装置、並びにこれを利用した車両用監視システムを提供する。
【解決手段】 撮像装置3からの入力画像と予め設定された背景画像とに基づいて、背景画像に対して変化のある対象領域と変化のない背景領域とからなる二値化画像をフレーム毎に生成し(S120)、この二値化画像をフレーム間で比較することで、対象領域のまま変化のない重なり領域、背景領域から対象領域に変化した増加領域、対象領域から背景領域に変化した減少領域を抽出する(S130)。そして、互いに隣接する増加領域,減少領域,重なり領域を一つの統合領域として抽出し、その抽出した統合領域、及び増加領域,減少領域のそれぞれについて領域パラメータ(領域面積,X座標和,Y座標和)を求め(S140)、この領域パラメータに基づいて、統合領域毎にその統合領域に示された物体(対象領域)の動きを求める(S150)。
(もっと読む)
ゴルフボールの画像を処理するための方法、装置、およびコンピュータプログラム製品
ゴルフボールのバックスピンとサイドスピンとを含むゴルフショットに関連する様々なパラメータが確実に測定できるようにする、ゴルフボールの画像を取り込んで解析するための方法、装置、およびコンピュータプログラム製品を提供する。さらに、これらの方法、装置、およびコンピュータプログラム製品は、取り込まれたそれぞれの画像をタイムリーに個別的に較正するよう構成されうる。  (もっと読む)
(もっと読む)
物体追跡装置および物体追跡方法
【課題】広角カメラで撮影された監視すべき領域の画像中に侵入物体が検出され、望遠カメラがその侵入物体を追跡して撮影を始めた後に、監視すべき領域内に別の物体が侵入したような場合にも、その別の物体について追跡を行うことのできる物体追跡装置および物体追跡方法を提供する。
【解決手段】Wカメラ装置2およびNカメラ装置3と、Wカメラ装置2で撮影された広角画像から複数の物体を検出する物体検出部5と、複数の物体それぞれの広角画像における位置情報を含む履歴情報を作成する履歴情報作成部7と、追跡すべき物体の履歴情報の条件を設定する条件設定部11と、条件設定部11で設定された条件に適合する履歴情報を有する物体を追跡すべき物体として複数の物体から選択する物体選択部10と、物体選択部10で選択された物体を撮影するようにNカメラ装置3を駆動する駆動部4とを備えた。
(もっと読む)
画像処理による移動物体計測方法及び装置
【課題】計測誤差をより小さくする。
【解決手段】移動物体を撮像するビデオカメラ10から遠ざかる方向へ移動物体が移動するときには移動物体の略後端を代表点とし、ビデオカメラ10へ近づく方向に移動物体が移動するときには移動物体の略前端を代表点とし、代表点に関する物理量を計測する。移動物体の領域に対する相対位置を移動物体の代表点として予め定めておいてもよい。移動物体が他の移動物体と重なっていないと判定した場合には、移動物体の幾何学的重心を代表点として求め、移動物体が他の移動物体と重なっていることを検出した場合には、移動物体の動きベクトルに基づいて、重なりがないとしたときの幾何学的重心に相当する点を代表点として求めてもよい。
(もっと読む)
幾何学的特徴データを確定すること、および使用すること
本発明は物体の形状に関する情報を表す特徴データを確定する方法に関する。少なくともいくつかのセル(p)がそれぞれ物体の対応する部分を含むように、物体が位置する空間内の複数のセル(p)を定義する分割スキーム(RP)が確定され、該複数のセル(p)に含まれる物体の対応する部分の少なくとも一つのプロパティに基づいて、物体の特徴データが確定される。本発明の第一の態様によると、複数のセル(p)の少なくとも二つが少なくとも部分的に互いに重なり合い、本発明の第二の態様によると、複数の区域(r)に含まれる物体の対応する部分が所定の測定基準に関して互いにほぼ等しいように、セル(p)の少なくともいくつかの境界が物体が位置する空間内の該複数の区域(r)を区切る。本方法は、類似探索を実行したり類似分類を実行したりするのに使用することができる。コンピュータープログラム製品および装置は対応する特徴から成る。本発明は、幾何学特徴データを確定する先行技術の方法の正確さ、および/又は効力、および/又は性能、および/又は有用性を改善する技術を提供する。  (もっと読む)
(もっと読む)
低照度の深度に適応可能なコンピュータ視覚を用いた移動物体検出
移動物体検出は距離又は深度情報を含む低照度画像に基づいている。視覚システムは、並進運動が支配的で少量の回転運動を伴うプラットフォーム上で動作する。運動が背景の移動と一致しない移動物体の検出は、形状に基づいたアプローチを補足する。低照度でのコンピュータに基づいた視覚支援では、同時およびその次のフレームブロブの対応を求めるために二段階技術が用いられる。平均風景視差を用いることにより、陽にエゴモーションを計算することなく、運動が検出される。これらの技術は、熱放射物体がホットスポットとして現れる赤外感光ビデオデータの特性を利用する。 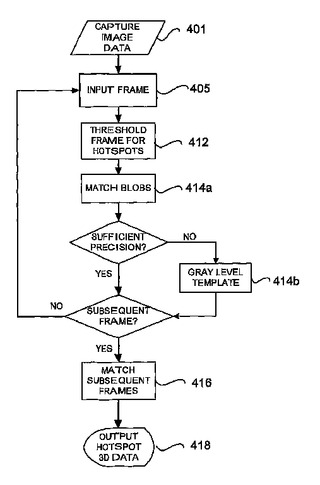 (もっと読む)
(もっと読む)
目標物の自動識別システム
第二輪郭(CM)と第一輪郭(CI)との近接性の測定方法は、第一輪郭の各点に関して、最も近いと決定された第二輪郭点と関連付けるステップ、及び前記第二輪郭点と関連付けられた第一輪郭点(I24、I28、I29)の集合の中から最も近い第一輪郭点(I24)を決定することにより、第二輪郭の各点(M15)と第一輪郭の一つ又はゼロの点との組合せステップを含む。
目標物の自動識別方法はこの近接性の測定プロセスを、第二輪郭として適用されるテンプレート輪郭の近接性の尺度を決定するために、第一輪郭として適用される画像輪郭に適用する。
(もっと読む)
101 - 119 / 119
[ Back to top ]