
Fターム[5L096EA27]の内容
Fターム[5L096EA27]に分類される特許
81 - 100 / 119
操作情報入力装置

【課題】操作者の撮像画像を解析して操作者が手の動きで示した操作情報を機器へ入力する操作情報入力装置において、手の円軌道の動きを正確に検出・認識できるアルゴリズムを提供し、信頼性の高い操作情報入力を実現する。
【解決手段】撮像画像データをブロックに分けた輝度データに変換し、フレーム間の差分を解析して手の動きによる特徴点を抽出する。操作者が手を円軌道に沿って動かすと、特徴点の空間座標は少なくとも4箇所においてX座標又はY座標のいずれかが極値となるため、その極値位置と検出時刻とを極値情報として記憶させる。そして、時系列的位置関係が円軌道パターンに適合するか否かを判定すると共に、円軌道の回転方向も判定し、その判定結果に基づいて音量調節等の制御信号を機器に入力させる。
(もっと読む)
移動体検出システム、移動体検出装置、移動体検出方法及び移動体検出プログラム

【課題】空間内の移動体位置を正確に特定するとともに、当該位置特定された移動体の時間経過に伴う移動情報を正確に取得できるようにすること。
【解決手段】撮影装置10a、10bにより撮影される時系列的な複数フレームの静止画像に対し、フレーム間差分画像と背景差分画像とを作成及び合成して移動体領域を特定する移動体領域特定手段41と、フレーム間差分画像内の差分領域に3次元座標を割り付ける3次元計測手段42と、左右の静止画像の減色した静止画像と特定された移動体領域とを重ね合わせて各移動体領域に対しラベルと3次元座標とを割り付けて分離する移動体分離手段43と、二つの異なる時間の移動体が同一かを判定して移動体を追跡する移動体追跡手段44と、移動体が静止画像のどの計測エリアをどの順序で通過したかを判別して、移動体の数と移動方向とを計測する移動体計測手段45と、を備えた。
(もっと読む)
物体認識方法、物体認識用のプログラムならびにその記憶媒体、および物体認識装置
【課題】一般化ハフ変換による物体認識処理の高速化および高精度化を実現する。
【解決手段】処理対象画像31上で抽出されたエッジ点E毎に、あらかじめ登録されたN個のモデルエッジ点の情報を用いて、認識対象物の基準点Oの座標(X,Y)および回転角度Θを算出する。さらに、2次元の投票平面S,Cの座標(X,Y)に、それぞれsinΘ,cosΘを投票するとともに、座標毎に投票された値の累計値を算出する。投票処理が終了すると、各平面の累計値を座標毎に対応づけてこれらの自乗和(S(X,Y))2+(C(X,Y))2を求め、これを投票平面Pに投票する。そして、この投票平面Pにおいて最大値が得られる座標(XP,YP)を抽出し、これを基準点Oの座標として認識する。また平面S,Cの前記座標(XP,YP)における累計値を用いて、回転角度を算出する。
(もっと読む)
情報処理装置及びその制御方法、コンピュータプログラム、記憶媒体
【課題】 撮像条件が動的に変化する環境においても高い精度で物体認識を行う技術を提供する。
【解決手段】 情報処理装置に、顔を含む画像データを入力する画像入力部100と、前記画像データより前記顔の特定箇所の位置を検出する顔位置検出部101と、検出された前記特定箇所の位置に基づいて、前記画像データより前記顔の特徴点を検出し、検出された前記特徴点に基づいて前記顔の表情を判定する表情認識部102とを備え、前記特徴点の検出は前記特定箇所の位置検出よりも検出精度が高く、前記特定箇所の位置検出は前記特徴点の検出よりも変動に頑健である。
(もっと読む)
移動体計測装置、信号制御システム、移動体計測方法及びコンピュータプログラム
【課題】 車両の高さにかかわらず、従来よりも正確に移動体(例えば、車両)の速度を計測することができる移動体計測装置、該移動体計測装置を備える信号制御システム、移動体計測方法、及び前記移動体計測装置を実現するコンピュータプログラムを提供する。
【解決手段】 CPU28は、撮像画像の画素の動きベクトルの角度差を算出し、算出した角度差が閾値以下であるか否かを判定し、算出された角度差が閾値以下である画素であって、隣接する画素を連結した連結ブロックを特定する。CPU28は、連結ブロック内の画素の動きベクトルを検索し、検索した動きベクトルから最大値を算出する。CPU28は、動きベクトルの最大値に基づいて、車両の速度を算出する。
(もっと読む)
紙葉類識別装置および紙葉類識別方法
【課題】紙葉類のクラスを効率的に推定し、かつ、媒体変動にロバストなパターン識別が可能となる紙葉類識別装置および紙葉類識別方法を提供する。
【解決手段】紙葉類から得られる画像パターンとあらかじめ設定される基準パターンとを比較することにより当該紙葉類の種類や真偽等を識別する紙葉類識別装置において、紙葉類の画像パターンを複数の領域(画素あるいは画素の集合)に分割し、重み付けや選択を行ない、領域ごとに識別結果を得て、その論理的な組み合わせで全体の識別結果を決定する。
(もっと読む)
エッジ検出装置
【課題】 エッジの検出が、被検出物のエッジの実情に合わせて精度よくできるようにする。
【解決手段】 エッジ検出装置14は、被検出物17が有するエッジ18を含むエッジ検出領域19が撮影部21により撮像された画像20につき、ある一方向であるX方向で上記エッジ18を検出するものである。エッジ検出装置14は画像処理部24を備え、この画像処理部24は、画像20における被検出物17のX方向での第1部位から、X方向でエッジ18を越えた第n部位のそれぞれについて、X方向に直交するY方向の複数点で輝度を検出してその平均値を演算し、これら各平均値によりX方向での各階調についてヒストグラム30を作成し、このヒストグラム30において、X方向での第x部位における階調の変化量がエッジ検出しきい値以上のとき、第x部位をエッジ18として検出する。
(もっと読む)
障害物検出装置
【課題】 あらかじめ車両などが写っていない背景画像を用意する必要がなく、物体領域の情報を背景画像の更新に必要とせず、遠方にある車両を止まっている障害物と誤判断しない障害物検出装置を提供する。
【解決手段】 所望の対象領域以外の画像領域をマスクするマスク処理手段102と、マスクされた画像信号から所定の周波数成分の信号を抽出する抽出手段106と、抽出された信号の出力レベルと所定の閾値に基づき画像の画素を2値化する2値化手段107と、2値化された画素から画素の集合領域を生成する集合領域生成手段108と、生成された集合領域の所定の情報を集合領域ごとに算出する情報算出手段109と、現時点の画像の画素の集合領域の所定の情報と現時点より前の画像の画素の集合領域の所定の情報に基づき、集合領域間の対応付けを行う対応付け手段110と、対応付けの情報に基づき障害物の存否を判断する判断手段111とを備える。
(もっと読む)
文書処理装置、方法およびプログラム
【課題】 文書処理の負担を軽減可能な文書ファイルを作成することができる文書処理装置、方法およびプログラムを提供すること。
【解決手段】 文書処理装置は、文書ファイルに含まれるテキスト文書領域と非テキスト文書領域を抽出する領域抽出部20と、領域抽出部20によって抽出された非テキスト文書領域に含まれる1つ以上の部分画像を抽出する領域内グループ分析部42と、領域内グループ分析部42によって抽出された部分画像に対して関数化近似処理を行って特徴量を抽出する関数化処理部44と、テキスト文書領域に対応するテキスト情報とともに、関数化処理部44によって抽出された特徴量を格納する文書ファイル格納部50とを備えている。
(もっと読む)
記号認識方法及び装置
【課題】電子化された図面画像からの記号認識を、ユーザーが任意に登録した記号で高速かつ高精度に行う。
【解決手段】紙図面を図面画像入力装置から読み込み、図面画像記憶装置4に格納する。あらかじめ与えられた記号ベクトルデータベース2から、ユーザーが認識したい記号を記号ベクトル装置5に格納する。次に、特徴点照合手段7でベクトル記号の特徴点を抽出し、図面画像と特徴点を照合して、記号の位置、向きおよび大きさを含む記号データを候補として特定し、記号データ記憶措置8に格納する。また、認識したいベクトル記号をラスタ変換手段9で記号画像に変換し、記号画像記憶装置6に格納する。特徴量照合手段10は、記号画像記憶装置6に格納された記号画像から特徴量を抽出し、図面画像記憶装置4に格納された図面画像内で、記号データ記憶装置8に格納された記号データによって特定される範囲における特徴量と照合し、記号を認識する。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】 補正限界に達する確率を低くして、かつ手ぶれなどによる画像ぶれを軽減することができる画像処理装置、画像処理方法、画像処理プログラムを提供する。
【解決手段】 動き軌跡算出部120は、取得されたフレーム画像の動きベクトルを算出し、動きベクトルを用いてフレーム画像の動き軌跡を算出する。補正動き軌跡算出部130では、動き軌跡にローパスフィルタをかけて、高い周波数成分を減衰させた補正動き軌跡を算出する。補正位置ベクトル算出部140は、動き軌跡と補正動き軌跡の差から補正位置ベクトルを算出する。補正位置ベクトルが補正可能な範囲を超えているフレームが存在する場合、補正動き軌跡算出部は、ローパスフィルターの遮断周波数を高くして、補正限界を超えている付近の補正動き軌跡を更新する。補正フレーム画像生成部150は、算出された補正位置ベクトルに基づいて補正フレーム画像を生成する。
(もっと読む)
画像検索方法及び画像検索装置ならびにプログラム
【課題】
大量のデータ画像の中からクエリー画像に類似する画像を漏れなく抽出する画像検索方法、装置およびプログラムを提供する。
【解決手段】データ画像に属する画素を3次元の色空間に写像する写像手段7と、前記色空間に写像されたクエリー画像に属する全ての画素の集合の重心と前記色空間の原点を通る直線を回転軸とし、前記原点を頂点とする円錐であって、前記クエリー画像に属する全ての画素をその内側の領域に包含する最小の円錐(以下クエリー円錐と言う。)の外側の領域に存在する前記データ画像の画素の数(以下、「画素の数」と言う。)を計数する計数手段8と、前記画素の数が所定の閾値より小さい場合に前記データ画像を前記クエリー画像に近似する画像と判定する閾値判定手段9とを備える
(もっと読む)
オンライン座標値修正装置およびオンライン座標値修正プログラム
【課題】 自動処理により検出される検出対象の座標値の修正を手動処理により行う場合に、修正された座標値の連続性を損なうことなく、時間的に滑らかに修正を行うことが可能なオンライン座標値修正装置を提供する。
【解決手段】 オンライン座標値修正装置1は、位置検出装置2から、検出座標値とその検出座標値に対する信頼性値とを入力する検出情報入力手段10と、操作者によって操作される座標指示装置3から、操作者が指示する位置を示す指示座標値と、操作者が座標指示装置3に対して加えた加圧値とを入力する指示情報入力手段20と、信頼性値と加圧値とに基づいて、検出座標値と指示座標値とを加重合成することで、検出座標値を修正した修正座標値を算出する加重合成手段30とを備える構成とした。
(もっと読む)
測量機器において画像処理を行う方法と装置
本発明は、少なくとも測量対象の物体(1)の記録画像(4)を捕捉する記録手段(3)を備える測量機器(2)を用いて、物体(1)を測量する方法に関する。記録手段(3)の帯状カバレージ領域(5)への角度方向を求めた後、記録画像(4)を捕捉し、少なくともその一部を表示画像(6)として表示する。続いて、記録画像座標(7)を特定するが、これは割り当てられた少なくとも1つの表示画像座標(8)を確定することにより行う。そして、記録画像座標(7)を、少なくとも1つの測定量に、特には立体角に変換する。テンプレート(10)は、表示画像上におくことができるモデルであって、物体(1)の少なくとも一部を記述する。ユーザは目標点確定の際にこのテンプレートにサポートされる。テンプレート(10)を呼び出して位置決めした後、テンプレートは記録された物体(1a)に適合され、テンプレート(10)の特性点(11)を用いて記録画像座標(7)が求められる。その他本発明は、電子的な表示・制御装置(31)、測量機器(2)、本方法実行のためのコンピュータプログラム製品に関する。  (もっと読む)
(もっと読む)
画像処理方法および画像処理装置およびコンピュータプログラムおよび記憶媒体
【課題】定型に近い文書の位置合わせを行いたい。
【解決手段】文書画像において指定された指定領域をテンプレートとして保持するとともに、前記テンプレートを作るための画像について指定領域の内部及び周辺の特徴情報を取得してその特徴を保持し、入力画像に対して前記指定領域と同じ位置を抽出する画像処理方法において、前記テンプレート作成画像上で、指定領域が表枠の一部であるかどうかを判定し、表であった場合には、前記指定領域を囲む枠を含む表の内部を解析して、表の構造上でどの位置が指定されたのかを認識し、保持するようにした。
(もっと読む)
動きベクトル検出方法、動きベクトル検出装置、動きベクトル検出プログラム及びプログラム記録媒体
【課題】抽出した画面全体の動き特徴に基づいて初期変位ベクトルを補正することにより、少ない演算回数で被写体の動きベクトルを正しく検出可能とする。
【解決手段】ベクトルメモリ4から現フィールドの被検出ブロックの近傍に位置する複数のブロックの動きベクトルを第1の候補ベクトル群として読み出し、理論動きベクトル演算部3で、撮影時のカメラの向きなどを含むカメラパラメータに基づいて画面上の座標変化を被検出ブロック毎に又は予め定めた特定ブロックについて第2の候補ベクトルとして求め、該第2の候補ベクトルと前記第1の候補ベクトル群のうち、現フィールドの被検出ブロックの動きに最もふさわしい値の動きベクトルを初期変位ベクトル選択部5で初期変位ベクトルとして選択し、該初期変位ベクトルを起点として動きベクトル演算部6で被検出ブロックの動きベクトルを1乃至複数回の演算により求める。
(もっと読む)
人数検出装置及び方法
【課題】測定環境の影響を受けることなく、人物の人数を比較的簡単な信号処理によって判定することを目的とするものである。
【解決手段】所定の監視領域内に存在する人物の人数を判定する装置であって、前記所定の監視領域内にレーザ光を走査状に照射すると共に該レーザ光の反射光を検出することにより、前記監視領域の各位置における距離情報を取得するレーザレーダと、前記各位置における距離情報に基づいて人物の高さを判定し、当該高さを標準的な体格を有する人物の首から頭部までの高さ範囲に相当する閾値と比較することにより監視領域内に存在する人物の人数を判定する人数判定部とを具備する、という手段を採用する。
(もっと読む)
物体検出装置、物体検出方法、物体検出プログラム、距離センサ
観測対象空間に存在する少なくとも1つの物体を検出する物体検出装置であって、検出対象物体の形状を表す画像である物体モデルを算出して記録する物体モデル記録部3と、一度に観測対象空間の全体をカバーするミリ波を照射し、物体候補の距離の算出を行うミリ波距離センサ1と、視点の異なる特徴画像と距離画像を算出するステレオ画像センサ2と、物体候補を選択する制御部7と、物体モデルから照合モデルを算出するモデル変換部4と、特徴画像と距離画像から照合画像を抽出する照合画像抽出部5と、照合モデルと照合画像の類似度を算出し、最大類似度が所定の範囲内となった場合、照合画像の座標と物体候補の距離から前記物体の3次元位置を算出し、前記物体の3次元位置を外部へ出力する類似度照合部6とを備えてなる。 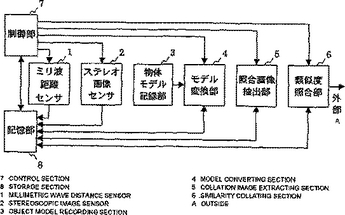 (もっと読む)
(もっと読む)
柱状入力装置およびゲームプログラムにおけるアクションを制御するために二次元カメラ画像から三次元空間にオブジェクトをマッピングする方法
【課題】照明の条件に依存してシステムを較正することが不要な柱状入力装置を提供する。
【解決手段】手によって操作される柱状オブジェクトは、一台のビデオカメラによって捕捉され、オブジェクトに係わる画像の部分を分離させ、オブジェクトの位置および方向を三次元空間にマッピングする。オブジェクトの三次元的な情報はメモリに格納され、ビデオ画面上のシーンにおける仮想オブジェクトのゲームプログラムにおけるアクションの制御に用いられる。種々の柱状オブジェクトについての三次元的な情報を得るためのアルゴリズムには、領域情報計算、エッジ検出および/または色遷移位置の特定を含むジオメトリ処理が用いられ、二次元的な画素データから柱状オブジェクトの位置と方向が求められる。柱状オブジェクトに付けられるストライプの色は、大幅な色遷移が検出されるように、二次元的なクロミナンス色空間における分離度が最大となるように決められる。
(もっと読む)
座標系分離記録再生装置
【課題】 動画映像として取得される現実空間を静止座標系と移動体毎に固有の座標系とに分解し、複数の座標系に分類して座標系毎に分割して記録し、再生時にそれぞれの座標系を合成して配置することでバーチャル空間を構成して動画映像を生成することにより、効率よく、精度よく、現実世界をバーチャル空間に記録再生し、動画データを極限まで圧縮可能とする。
【解決手段】 座標系分離記録再生装置1は、現実世界を撮影した動画映像に含まれる複数の座標系を検出し、座標系毎に対象物を記録する座標系分解記録構成部10と、座標系分解記録構成部10で記録された信号を再生し、各座標系毎に対象物を構築し、複数の座標系を合成して動画映像を再生し、現実世界をバーチャル世界に再構築する座標系合成再生構成部20と、を備えている。
(もっと読む)
81 - 100 / 119
[ Back to top ]