
Fターム[5L096FA04]の内容
Fターム[5L096FA04]に分類される特許
121 - 140 / 223
路面判別装置および路面判別方法
【課題】撮像画像内にエッジ強度が大きい線分が検出されない場合であっても、撮像画像に存在する路面や立体物の判別を行うことができるようにする。
【解決手段】画像処理部10が、車両に搭載されたカメラCで取得した車両の周囲の路面の画像から撮像画像を生成し、領域設定部21が、撮像画像を区画して、エッジ強度が第1の閾値以上となる強エッジの線分を含まない弱エッジ領域を設定し、特徴抽出部22が、エッジ強度が第1の閾値よりも小さい第2の閾値以上となる弱エッジを、弱エッジ領域内において検索すると共に、検索された弱エッジからなるテクスチャの特徴を抽出し、領域判定部23が、車両の直進走行時におけるテクスチャの特徴の経時的変化に基づいて、弱エッジ領域が路面領域と立体物の領域とのうちの何れであるのかを判定し、路面判別部24が、判定結果に基づいて、撮像画像における路面の判別を行う構成とした。
(もっと読む)
入眠状態検知方法、入眠状態検知装置、入眠状態検知システム及びコンピュータプログラム

【課題】入眠状態を正確に検知することができる入眠状態検知方法、該入眠状態検知方法を実施する入眠状態検知装置を提供する。
【解決手段】時系列的に得られる顔の画像データから眼の開度を算出し、入眠状態及び該入眠状態と眼の開度が異なる第1覚醒状態を判別することにより入眠状態を検知する入眠状態検知装置2に、時系列的に得られる画像データから下瞼を検出する下瞼検出手段と、該下瞼検出手段にて検出された下瞼の湾曲度を算出する湾曲度算出手段と、眼の開度が第1覚醒状態より入眠状態に近い第2覚醒状態及び入眠状態を、算出された下瞼の湾曲度に基づいて判別する判別手段とを備える。
(もっと読む)
人口推定装置およびプログラム
【課題】地図上で指定された範囲内の人口を推定する。
【解決手段】画像取得部14は、空中写真画像記憶部50からユーザによって指定された範囲の空中写真画像を選択する。建物抽出部16は、選択された空中写真画像を画像処理して地上の建物を抽出する。照合部20は、指定された範囲の空中写真画像を同範囲の用途地域図画像と比較し、特定の用途地域にある建物を非住宅と判定する。内包判定部22は、建物の平面形状に基づいて建物を住宅と非住宅とに分類する。住宅確率算出部24は、画像処理によって建物の輪郭線を抽出し、輪郭線で囲まれた面積と外周長とを算出し、面積と外周長との関係に応じて建物が住宅である確率を算出する。居住人数算出部30は、住宅の容積を推定し、容積に用途係数と住宅確率とを乗じることで各住宅における居住人数を算出し、指定範囲内の全ての住宅についての居住人数を合計する。
(もっと読む)
色分割および形状解析によってサッカービデオの関心対象を検出するための方法と装置
【課題】
サッカー・ビデオ・フレームのプレーヤを検出し、かつその場所を検出するための方法が開示されている。
【解決手段】
本方法は、色分割および連結構成要素分析によって大まかに抽出された前景からプレーヤ、および、ボールを特定するために形状解析に基づくアプローチによるアーチファクトによって生じる誤差を回避する。このために、あらゆる前景の小塊のスケルトンを抽出するためにユークリッドの距離変換を実行し、フォールスアラーム(ノンプレーヤ、および、ノンボール)を取り除くために形状解析を実行する。そして、スケルトンプルーニング、および逆ユークリッドの距離変換を実行することによって、主にプレーフィールドラインによって生じたアーチファクトを切り離す。  (もっと読む)
(もっと読む)
デジタル画像取込装置における顔検索及び検出
画像における顔の検出方法は、第1位置にある画像の第1窓内において顔検出を実施することを含む。信頼水準は顔検出から得られ、第1位置に又はその付近に画像が顔を含む確率を示す。次に、顔検出は第2位置にある第2窓内において実施され、この場合、第2位置は信頼水準に基づき決定される。 (もっと読む)
複数のキューを使用する複数の個人の自動検出および追跡のための方法およびコンピュータ可読な記憶媒体
【課題】複数の個人の自動的な検出および追跡を提供すること。
【解決手段】複数の個人の自動的な検出および追跡に、ビデオおよび/またはオーディオ内容のフレームを受け取ることと、フレーム内で新しい顔領域に関する候補区域を識別することが含まれる。1つまたは複数の階層検証レベルを使用して、人間の顔が候補区域内にあるかどうかを検証し、1つまたは複数の階層検証レベルで人間の顔が候補区域内にあることが検証される場合に、候補区域に顔が含まれることの指示を行う。複数のオーディオキューおよび/またはビデオキューを使用して、フレームからフレームへとビデオ内容内の検証された顔のそれぞれを追跡する。
(もっと読む)
物体認識方法および装置
【課題】任意の輪郭線を有する物体であっても、抽出された輪郭線を用いて信頼性よく、しかも確実に物体を認識することを可能にする。
【解決手段】物体2の学習時、学習すべき輪郭線3を抽出する領域R1、R2を指示してこの指示した領域において輪郭線を抽出し、この抽出した輪郭線ごとに該輪郭線を抽出した領域を示すコードを付与して輪郭線を記録する。物体認識時にも、認識すべき輪郭線を抽出する領域を指示し、該指示した領域において抽出した輪郭線に対してこの輪郭線を抽出した領域を示すコードを付与し、認識時に付与された輪郭線抽出領域を示すコードと学習時に付与されたコードが一致している輪郭線を用いて物体を認識する。このような構成では、物体認識時に付与した輪郭線抽出領域コードが学習時のものと一致することが確かめられてから輪郭線の照合が行われるので、物体の認識精度が向上する。
(もっと読む)
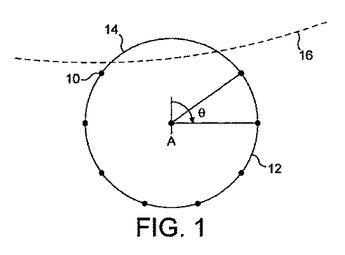
コサイン変換を使用する形状表現
虹彩の内側または外側境界を近似する方法は、最小二乗近似を含む近似境界表現(20)を、固定点(A)からの境界上の計測点(10)の距離の、固定点(A)に関する角度(θ)の関数のコサイン変換級数によって生成する段階を含む。より広義には、方法は、任意の二次元曲線または模様の形状を近似するために使用することができる。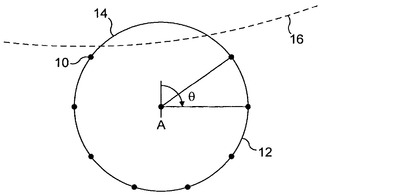
 (もっと読む)
(もっと読む)
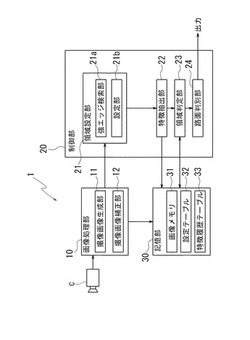
カメラからのカメラ画像に基づいて位置を判定する装置、方法およびコンピュータ・プログラム
カメラからのカメラ画像に基づいて位置を判定する装置は、ハフ変換器、位置記述設定器およびデータベース比較器を含む。
ハフ変換器は、カメラ画像またはそれから引き出される前処理されたバージョンのなかで円弧または楕円弧を識別し、カメラ画像または前処理されたバージョンをさまざまな方向に通過する複数のまっすぐなストレッチを識別するように形成される。
位置記述設定器は、識別された円弧または楕円弧および識別されたまっすぐなストレッチに基づいて、識別された円弧または楕円弧および識別されたまっすぐなストレッチをパラメータによって記述する位置記述を得るように形成される。
データベース比較器は、更に、位置記述を複数の比較用位置記述と比較し、比較の結果として、位置に関する情報を得るように形成される。
(もっと読む)
画像処理方法および画像処理装置
【課題】被検物の中心位置をより正確に計測することが可能な画像処理方法を提供する。
【解決手段】本発明は、画像内で輪郭形状が円形状となる被検物の中心位置を計測するための画像処理方法であって、画像内において被検物の輪郭部分を構成する複数の点の位置を算出し(ステップS103)、算出した複数の点の位置から円近似を行って被検物の中心位置および半径を算出し(ステップS104)、円近似により算出した被検物の中心位置から複数の点までのそれぞれの距離と、円近似により算出した被検物の半径との間の残差をそれぞれ算出して、算出した残差が所定値よりも大きい点を複数の点から除外し(ステップS105)、除外した残りの点の位置から円近似を行って被検物の中心位置および半径を算出する(ステップS112)。
(もっと読む)
画像の道路標識を確認するためのデバイス、方法およびコンピュータ・プログラム
画像の道路標識を確認するデバイスは、画像またはそれから得られるエッジ画像における画像を異なる方向に通る複数の線部分を確認するハフ変換器を含む。さらに、デバイスは、確認された線部分に基づいて、画像またはそれから得られるエッジ画像の所定の形状を検出するための形状検出器を含む。それとは別に、デバイスは、検出された所定の形状に基づいて検出された所定の形状に対応する画像部分を選択して、選択された画像部分に基づいて道路標識を確認するためのパターン識別器を含む。  (もっと読む)
(もっと読む)
図形群画像認識方法
【課題】悪条件下でも図形群画像認識を可能とする方法を提供する。
【解決手段】図形群画像認識方法であって、視覚装置などから取り込んだ画像データに対して、2値化処理から特徴抽出までの処理(図1中の符号S1からS4)を行い、対象領域を得る。次に、第1段階として、前記の対象領域に対して一次図形判定(即ち、図形の面積,形状特性,個数の条件に基づく判定)を行い、一次候補図形群を選択する(符号S5からS7)。さらに、第2段階として、前記の一次候補図形群に対して二次図形判定(即ち、図形間の距離条件に基づく判定)を行い、二次候補図形群を選択する(符号S8からS9)。また、前記第一、第二判定条件のどちらかが失敗の判定だった場合、2値化処理の閾値を変更し、第1段階に戻る手順も備える(符号S13)。
(もっと読む)
動体追跡装置,動体追跡方法,その方法を記述した動体追跡プログラム及びそのプログラムを格納した記録媒体
【課題】複数の動体を撮像する1又は複数の撮像装置から送られる画像を統合し、各動体の動きを安定して追跡する。
【解決手段】1又は複数の撮像装置を用いて動体を撮像した複数画像データに基づき、各時刻に複数の前記動体の対象状態を予測する手段11と、前記画像データを取得する手段12と、前記動体を写した領域を抽出したシルエット画像を作成する手段13と、シルエット画像,実世界の三次元構造,前記撮像装置の内部パラメータ及び外部パラメータ,変化タイプ,確率分布更新回数に基づいて対象状態分布を推定する手段14と、現時刻において最大確率になる対象状態と前時刻において最大確率になる対象状態に基づいて変化ベクトルを計算する手段15と、実世界の三次元構造と前記内部パラメータ及び外部パラメータを保存する手段21と、対象状態の確率的分布を記憶する手段22と、前記変化ベクトルを記憶する手段23と、を用いて、動体を追跡する。
(もっと読む)
位置姿勢計測方法及び装置
【課題】 誤検出指標や検出精度の低い指標による影響を減少させ、高精度かつより安定な撮像装置の位置姿勢計測を行う。
【解決手段】 指標検出部2030は、物体上に配置または設定された指標を撮像画像から検出する。評価量算出部2060は評価量を、この指標の画像上での2次元幾何特徴及び/又はこの指標の3次元空間中における撮像装置2010と指標との間の関係を表す3次元幾何特徴を利用して算出する。信頼度算出部2070は、算出した指標の評価量に応じてこの指標の信頼度を算出する。位置姿勢算出部2080は、算出された指標の信頼度と、検出された夫々の指標の画像座標に関する情報とを少なくとも用いて、物体または撮像装置2010の位置姿勢を求める。
(もっと読む)
医用画像処理装置、医用画像処理方法及びプログラム
【課題】脳動脈瘤と偽陽性候補領域との識別精度を向上し得ること。
【解決手段】処理対象画像に存在する脳動脈瘤の候補領域が検出され、また、処理対象画像の位置座標系が予め定められた基準位置座標系に変換される。そして、変換された処理対象画像に存在する脳動脈瘤の候補領域の位置座標を示す変換済脳動脈瘤位置座標を含む特徴量が算出され、算出された変換済脳動脈瘤位置座標と予め定められた識別境界情報とに基づいて、脳動脈瘤の候補領域に含まれる偽陽性候補領域が削除される医用画像処理装置10。
(もっと読む)
動体検出装置
【課題】 色等の情報を事前に登録することなく、危険範囲に存在する作業者や建物を高精度に検出する。
【解決手段】 動体検出装置は、入力画像P及び参照画像データに基づいて動体を検出する。動体検出装置は、旋回体3に設置された撮像手段6と、撮像手段6からの入力画像Pを参照画像データとして一時的に記憶する画像メモリ56を有する制御手段52と、を有する。制御手段52は、画像メモリ56に記憶されている参照画像データと撮像手段6から出力された前記入力画像Pを比較することにより旋回体3の旋回角度を検出する。制御手段52は、画像メモリ56に記憶されている参照画像データと撮像手段6から出力された入力画像Pを差分処理することによって動体を検出する。
(もっと読む)
画像処理方法および画像処理装置、並びに光学装置
【課題】ノイズに強い特徴を有しながら、被検出物の大きさや形状の変化に強く、検出に必要な演算を高速に行うことが可能な画像処理方法を提供する。
【解決手段】本発明は、画像に含まれる回転対称性を有した所定形状を検出するための画像処理方法であって、所定の形状を有した輝度測定領域内の輝度分布を、測定点を中心に輝度測定領域を所定角度ずつ回転させて測定し(ステップS103)、このように測定した輝度分布を積算して輝度測定領域に対応する回転方向積算輝度分布を算出し(ステップS104)、輝度測定領域における所定部分領域内の測定輝度値をそれぞれ積算して、所定角度の回転に応じて部分領域を円環状に繋げた円環状測定領域における半径方向積算輝度分布を算出し(ステップS107)、算出した回転方向積算輝度分布および半径方向積算輝度分布に基づいて、画像内の所定形状を検出するように構成される。
(もっと読む)
転倒検知装置、プログラム、転倒検知方法、及び転倒検知システム
【課題】人物の倒れ検知を精度良く行うことができる技術を提供する。
【解決手段】カメラで撮影された動画を構成する各フレームの画像データ(撮影画像)に対して制御部12の各処理部で種々の処理が施された後に、肩位置検出/追跡部160において、撮影画像に含まれる輪郭の近似曲線である上に凸の半円の中心位置が検出される。そして、倒れ途中検出部180によって、中心位置の垂直方向への経時的な変化を評価するための評価値(垂直変化評価値)が算出され、少なくとも当該垂直変化評価値に基づいて人物の転倒が検知される。
(もっと読む)
特定形状領域の抽出装置及び方法、特定領域の抽出装置及び方法、複写条件決定装置及び方法
【課題】画像中に存在する抽出すべき領域を高速かつ精度良く抽出する。
【解決手段】画像を測光し、微分フィルタを用いて各画素毎にエッジ強度及びエッジ方向を求める。次にエッジの追跡を開始する追跡開始点(基準点)を求め、抽出すべき領域の輪郭としての人物に相当する領域の輪郭に特有の丸みを帯びた形状の輪郭線のみが抽出されるように基準点に対するエッジの探索範囲を設定し((A)参照)、基準点におけるエッジ方向に基づいて探索すべきエッジ方向のパターンを設定し((B)参照)、探索範囲内に存在し前記パターンに合致するエッジ方向を有しかつ所定値以上のエッジ強度のエッジを探索し、前記条件に合致する複数のエッジ((C)にハッチングで示す)のうちエッジ強度が最大のエッジを次の基準点として選択する((D)参照)。上記処理を繰り返すことにより人物の輪郭に相当すると推定される輪郭線を抽出する。
(もっと読む)
アニメーション作成システムおよび方法
【課題】動いている被写体を撮影した映像から抽出した特徴点の編集作業を、円滑に行うことを可能にすること。
【解決手段】アニメーション作成システム1は、動いている被写体を撮影した映像19から、特徴点を抽出することで動きを抽出し、この特徴点を用いてアニメーションを作成するシステムであり、映像入力部3、特徴点抽出部5、検索部7、特徴点記憶部9、合成部11、特徴点編集部13、動作データ作成部15、アニメーション作成部17、および出力部21を含んでいる。検索部7は、抽出されなかった特徴点を含むフレームを特定する。合成部11は、特定されたフレームの合成画像を、特定されなかったフレームの合成画像とは、表示形態が異なるように作成する。よって編集者が、抽出されなかった特徴点を含むフレームを一目で把握することが可能になり、編集作業を円滑に進めることが可能になる。
(もっと読む)
121 - 140 / 223
[ Back to top ]