
Fターム[5L096FA04]の内容
Fターム[5L096FA04]に分類される特許
101 - 120 / 223
気泡像または液滴像の中心位置および形状算出装置

【課題】流体中の気泡または液滴を撮影した画像に含まれる気泡像または液滴像の形状を楕円に近似したときの該楕円の中心位置および楕円パラメーターとして、気泡像または液滴像の中心位置および形状を算出しうる装置を提供する。
【解決手段】本発明の装置は、上記画像の画像記憶手段、この画像を二値化して輪郭線抽出画像を求める輪郭線抽出手段を備え、一対のエッジ点の各エッジ点にハフ変換を施すことにより各エッジ点における輪郭線方向を求めるハフ変換手段、ハフ変換手段によりハフ変換を施したエッジ点の近傍において、共分散行列を求める共分散行列算出手段、共分散行列の最大固有値に対応する固有ベクトルを求め、その方向を接線方向として得る接線方向算出手段、中心位置候補記憶手段を備え、楕円中心位置を求めた各楕円について、該一対のエッジ点を通る楕円の楕円パラメーターを算出する楕円パラメーター算出手段を備えることを特徴とする。
(もっと読む)
レーンマーカ認識装置、車両、及びレーンマーカ認識用プログラム

【課題】道路上に離散的に設けられた鋲型のレーンマーカの認識精度を向上させることができるレーンマーカ認識装置を提供する。
【解決手段】道路画像から、道路上に離散的に設けられた鋲型のレーンマーカを認識するレーンマーカ認識装置1において、道路画像からレーンマーカの画像部分である可能性がある領域をレーンマーカ候補領域として抽出する候補領域抽出手段12と、各レーンマーカ候補領域の代表点を所定条件に従って決定し、該代表点に対応する実空間位置を、実空間代表点として算出する実空間代表点算出手段13と、実空間代表点のうち、相対距離が前記レーンマーカの規定に応じて設定された所定範囲内である実空間代表点を、1つのグループとするグループ化手段14と、グループ化手段14により1つのグループとされた実空間候補点に基づいて、レーンマーカの位置を認識するレーンマーカ位置認識手段17とを備える。
(もっと読む)
信号機認識装置,信号機認識方法および信号機認識プログラム
【課題】画像から信号機を認識する信号機認識装置に関し,撮影環境に左右されずに,精度良く画像から信号機を認識する技術を提供する。
【解決手段】色特徴画像取得部11は,所定のシャッタースピードで撮影された色特徴画像を取得し,色特徴候補領域抽出部12は,色特徴画像から,信号機の青,黄,赤のいずれかの点灯色であり,所定以上の円形度である領域を,色特徴候補領域として抽出する。形状特徴画像取得部13は,色特徴候補領域の周辺の平均輝度に基づいて決定されたシャッタースピードで撮影された形状特徴画像を取得し,形状特徴候補領域抽出部14は,色特徴候補領域の周辺から,所定の信号機の形状とマッチする領域を,形状特徴候補領域として抽出する。信号機検出部16は,形状特徴候補領域を検出された信号機の領域として,また色特徴候補領域の色を信号機の点灯色として認識する。
(もっと読む)
類半円検出装置および類半円検出プログラム
【課題】本発明は、二次元的に配列された画素で表現された画像から半円形に類似した類半円形状を検出するとともに、検出された類半円形状の傾きを得ることのできる類半円検出装置、およびコンピュータをそのような類半円検出装置として動作させる類半円検出プログラムを提供することを目的とする。
【解決手段】所定の注目画素を中心とした円に重なる円弧上の複数の評価画素に対応する複数の画素評価値を総合してその円弧が類半円形状に対応する円弧であるか否かを評価する総合評価値を算出する処理を、その円との重なりの位相が異なる複数の円弧について実行し、この複数の円弧に対応する複数の総合評価値を相互に比較して、上記複数の円弧の中から、類半円形状に最も近いことを表す総合評価値が対応付けられた円弧を抽出する。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】複数の画像間で比較を行う場合に、その比較のための位置合わせの基準となる領域を探索する処理量を削減するようにした画像処理装置を提供する。
【解決手段】画像処理装置の領域抽出手段は、画像内の連結領域を抽出し、形状判定手段は、前記領域抽出手段によって抽出された連結領域の形状を判定し、領域選択手段は、前記形状判定手段によって判定された形状に基づいて、他の画像と比較するための位置合わせに用いる領域を選択し、画像比較手段は、前記領域選択手段によって選択された領域を用いて、前記画像と前記他の画像との比較を行う。
(もっと読む)
画素間の類似尺度をリアルタイムで計算するための装置及びプログラム
【課題】画素間の類似尺度を高い信頼性で計算する。
【解決手段】類似尺度計算装置は、第1の画素250と第2の画素270との間の類似尺度を計算する。この装置は、それぞれ第1及び第2の画素を中心とする第1及び第2の円形ウィンドウ252及び272の各々の半径の各々上の画素の画素値を平均化する平均化計算部と、平均化された画素値の第1及び第2の列のフーリエ係数の第1及び第2のシーケンスを出力するFFT変換部と、第1及び第2のシーケンスの各々を正規化するための正規化ブロックと、FFT係数の第1及び第2の正規化されたシーケンス間の距離を計算する距離計算部と、を含む。
(もっと読む)
中空糸膜モジュールの検査方法及び検査装置
【課題】中空糸膜モジュールの欠陥検査方法では、検査精度を高めるためには、画像の分解能をあげなければならない。しかし、画像の分解能を上げると、画像データ量が増える。すると画像撮影のために時間がかかり、検査時間が増大するという課題があった。
【解決手段】比較的低い分解能で中空糸膜モジュールの端面の映像を撮り、画像補間によって情報量を増やす。その上で2値化した画像データを用いて欠陥検査を行う。このようにすることで、撮影時間を短くすることができ、またデータ補間と2値化によって、誤検出や過検出といったことのない精度よい欠陥検出をすることができる。
(もっと読む)
動的アラインメント・ビーム校正のためのシステムおよび方法
【課題】動的アラインメント・ビーム校正のためのシステムおよび方法
【解決手段】プラズマ処理システムにおいてDA(動的アラインメント)ビーム校正を実施するための方法が提供される。方法は、位置差を取得することを含み、位置差は、光学的撮像手法を使用して取得される。光学的撮像手法は、ウエハをエンドエフェクタ上に位置決めすることと、エンドエフェクタ上のウエハの静止画像を撮影することと、ウエハの中心およびエンドエフェクタによって定められたエンドエフェクタ規定中心を決定するために静止画像を処理することと、ウエハの中心とエンドエフェクタによって定められたエンドエフェクタ規定中心との間の位置差を決定することとを含む。方法は、また、ウエハとエンドエフェクタとの間の位置差をロボット移動補償によって補償することによってウエハをエンドエフェクタに対して中心合わせすることを含む。方法は、ウエハおよびエンドエフェクタに、プラズマ処理モジュールに付随するDAビームを通らせることを含む。方法は、また、DAビームの遮断−回復パターンを記録することによって基準DAビームパターンを得ることを含む。遮断−回復パターンは、ウエハおよびエンドエフェクタがDAビームを通って移動するのに伴って生じる。
(もっと読む)
拡張画像識別
画像の表現を導出する方法を説明する。この方法は、画像に対応する信号を処理することを含む。画像の3次元表現が導出される。画像の3次元表現は、画像の表現を導出するのに使用される。1つの実施の形態では、画像の各線は第1のパラメータ(d)と第2のパラメータ(θ)によって定義され、各線上の位置は第3のパラメータ(t)によって定義される。これらの第1のパラメータ、第2のパラメータ、及び第3のパラメータによって3次元表現がパラメータ化される。第1のパラメータの或る値において3次元表現から値の集合を抽出し、抽出値の集合における線又は線の一部に沿って汎関数を適用する。それらの線は第2のパラメータ又は第3のパラメータの値に沿って延在する。 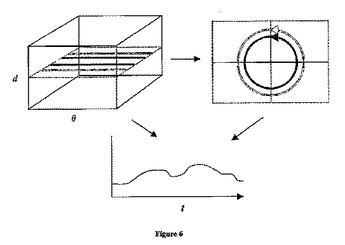 (もっと読む)
(もっと読む)
回転不変量2Dスケッチ記述子
記述子を求めるための方法であって、扇形内の複数の各ポイントと起点との間の最大距離を計算するステップと、前記最大距離を開始値として、前記複数のポイントのうち1つのポイントとターゲット線との最小距離を計算するステップと、前記最小距離から複数のフーリエ係数を計算するステップと、前記フーリエ係数から不変量の記述子を定義するステップとを実施することを特徴とする方法と、相応の手段を含むシステムと、相応のコンピュータ読出し可能命令を含むコンピュータプログラム。  (もっと読む)
(もっと読む)
3次元飲料容器位置決定装置
【課題】単一視点画像から対象物の幾何学的特徴を正確に検出する。
【解決手段】単一視点画像を使用することによって、平面上の対象物が特定され、その位置が決定される。斜視投影された単一視点画像は、疑似平面図内の正規化画像に変換され、対象物の上部形状又は下部形状の検出の精度を向上する。正規化画像を処理することによって正規化画像から1又は複数の幾何学的特徴が検出される。検出された幾何学的特徴は分析され平面上の対象物の正体及び位置を決定する。
(もっと読む)
情報処理装置、プログラム及び情報処理方法
【課題】容易な構成で精度良く円運動を検出でき、かつ、操作の切り替えをシームレスに行うことが可能な情報処理装置、プログラム及び情報処理方法を提供する。
【解決手段】手が写った入力画像から画像内の手の位置を検出し、複数の過去データについてこれらが回転運動を示していると仮定したときに、手の位置がこの回転運動で予測した角度範囲にあるならば最新の手の位置における回転角度を求めると共に、あらかじめ定めた手の動きに対応する処理を実行する。
(もっと読む)
輪郭検出装置、それを用いた視線検出装置、偽の輪郭データの除去をコンピュータに実行させるためのプログラム、視線方向の検出をコンピュータに実行させるためのプログラムおよびそのプログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】輪郭形状に関係なく、正確な輪郭形状を少ない計算量で求めることができる輪郭検出装置を提供する。
【解決手段】輪郭検出手段2は、撮像デバイス1により撮影された画像から複数の仮の輪郭データを検出する。演算手段3は、輪郭検出手段2によって検出された複数の仮の輪郭データを母集団としたときの複数の仮の輪郭データと母集団の重心との複数の第1の距離のばらつきを検出し、その検出したばらつきの重心と複数の仮の輪郭データとの複数の第2の距離と複数の第2の距離の平均とを演算する。判定手段4は、演算手段3によって演算された複数の第2の距離と複数の第2の距離の平均とを用いて第2の距離が複数の第2の距離の平均から相対的に離れている仮の輪郭データを偽の輪郭データとして複数の仮の輪郭データから除去して真の輪郭データを求める。
(もっと読む)
画像処理装置
【課題】輪郭線の形状の特徴として、特定条件の窪みを効果的に抽出することができると共に、複数の窪みが入り組んでいる構造の特徴も把握することができるようにし、又同様にして、輪郭線の形状の特徴としてその突起も抽出及び構造特徴把握可能とする。
【解決手段】2次元画像に含まれる輪郭線1の、窪みの特徴を示す抽象データを生成するために、輪郭線1上で開始点Sを定め、開始点Sから、探索点T1、T2のような探査点を該輪郭線1上において順次移動させる。又、移動後に、例えば探索点T2において、該移動方向に膨らむ形状の、折れ線又は曲線による探索弧20−2を、探索点の移動方向に対して所定の相互位置関係で発生する。探索弧20−2が、探索点以外で輪郭線1に接触乃至所定基準内まで接近するか否か判定しつつ、輪郭線1の窪みの有無を判定する。
(もっと読む)
円形状検出装置
【課題】検出対象に含まれる円形状を検出する。
【解決手段】画像情報から抽出したエッジ上に指定した複数の画素を中心としかつエッジの半径と同じ半径の仮想円を求めて当該仮想円を構成する画素について投票パラメータ空間に投票し、又は画像情報から抽出したエッジ上に指定した複数の画素を通る法線についてエッジから当該エッジの半径と同じ長さ位置を端点として求めて当該端点の画素について投票パラメータ空間に投票し、投票数が十分に大きい画素の位置をエッジの中心位置として判定し、補助投票空間の投票数データのうち、最大値投票数データ及び極大値投票数データを抑制空間に取り込んで検出対象円の中心位置を抽出するようにしたことにより、検出対象の円形状を一段と高速度で検出することができる。
(もっと読む)
電子的に会話を解析する方法および対応するシステム
本発明は、少なくとも2人の人の間の会話を電子的に評価するための方法に関し、オーディオデータを受けるステップと、会話の進行において少なくとも2人の人の発言の再区分を決定するためにオーディオデータを解析するステップと、解析するステップの結果を予め定められたコミュニケーションパターンと比較するステップとを備える。  (もっと読む)
(もっと読む)
マシンビジョンシステムの操作方法
【課題】本発明は、複数の異なる画像特性に基づいたエッジ位置を正確に検出することができるマシンビジョンシステムの操作方法を提供する。
【解決手段】マシンビジョンシステムの操作方法は、テクスチャ、強度、色等の複数の異なる画像特性に基づいてエッジ又は境界の位置を正確に検出し位置決めする。ユーザは、例えば、テクスチャに基づいてエッジ発見演算(又は作動)を、場合によっては、従来の強度勾配エッジ位置決め作動によって実行する境界検出ツールを起動することができる。境界検出ツールは、捕捉された対象物の画像のエッジ又は境界を含む主な注目領域を規定する。境界検出ツールは、現在の対象物のエッジを位置決めし、また迅速且つ確実に将来の類似対象物の対応エッジを位置決めするのに用いることができる。
(もっと読む)
イメージ分析方法
【課題】
本発明はイメージ分析方法に関する。
【解決手段】
イメージに含まれる複数のイメージブロックの起点及び終点座標を入力することによって、イメージブロック配列表を構成すると共に、前記イメージブロック配列表に基づいて前記イメージを分析する。
(もっと読む)
カラー画像を用いた看板および標識の認識方法
【課題】本発明は、撮像されたカラー画像を用いて道路標識等の対象物の認識性能を向上させたカラー画像を用いた看板および標識を認識する方法を提供する。
【解決手段】本発明のカラー画像を用いた看板および標識を認識する方法は、色情報の中の色相に着目してその範囲を3分割し、各分割領域において彩度情報が所定の閾値を超え、かつ円形度が所定の値となる場合に看板を抽出するものであり、円形度の情報により看板以外の領域の棄却を行い、看板は背景色と文字色のコントラストが高いことに着目して看板内の文字列領域を抽出し、予め用意した辞書データとの比較により看板を認識するものである。
(もっと読む)
欠陥分類装置
【課題】主に半導体ウェハ及び液晶パネルのマクロ検査におけるレジストの塗付ムラや露光不良、キズ、塵埃の付着などの欠陥に関して、欠陥データの登録を必要とせず、より人間の判断に近い分類を可能にする欠陥分類装置を提供する。
【解決手段】被検体の画像を基に検出された欠陥の種類を判別する欠陥分類装置において、検出された欠陥領域の画像より特徴量を抽出する手段であって、少なくとも2つ以上の検出領域の配置形状に基づく特徴量を抽出する手段を含む特徴抽出手段102と、この特徴抽出手段102により抽出された特徴量に基づき、欠陥種を判別する推論判別手段106と、この推論判別手段106により判別された欠陥種が確定した領域を前記欠陥領域の画像から除外する確定領域除外手段107とを具備する。
(もっと読む)
101 - 120 / 223
[ Back to top ]