
Fターム[5L096FA25]の内容
Fターム[5L096FA25]に分類される特許
101 - 120 / 138
情報呈示装置
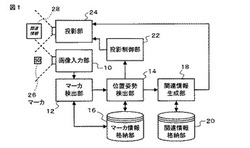
【課題】多数のユーザが同時且つ良好に確認できるように関連情報を呈示すること。
【解決手段】情報呈示装置は、所定の撮影範囲を有し、当該撮影範囲内の対象物に固定された光学的な特徴を有する特徴点の一つであるマーカ26を撮影するカメラを含む画像入力部10と、上記マーカ26と上記カメラの位置姿勢を検出する位置姿勢検出部14と、上記位置姿勢検出部14で検出した位置姿勢に基づいて、上記マーカ26に関連した関連情報を生成する関連情報生成部18と、上記カメラに対して所定の位置姿勢で配置され、上記関連情報生成部18で生成した情報を投影するプロジェクタを含む投影部24と、上記位置姿勢検出部14で検出した位置姿勢に基づいて、上記プロジェクタを制御する投影制御部22と、を備える。
(もっと読む)
部品位置の認識方法

【課題】部品が大きく傾いているときであっても、複素数フィルタを使用してその中心位置及び傾きを正確に求める。
【解決手段】部品の概ねの位置及び傾きを検出し、その後求められた傾きの分だけ画像を回転して該傾きをほぼ0とし、この状態で複素数フィルタをかけ、かけた結果に対して画像を戻し、本来の位置における中心位置及び傾きを求める。
(もっと読む)
推定装置
【課題】非ガウス性雑音が存在する環境でも、精度良くしかもリアルタイムに時系列ベイズ推定を行うことが可能な推定装置を提供する。
【解決手段】混合分布生成部14が、頭部姿勢を表すアフィンパラメータの推定結果に基づく上位予測分布と、顔特徴点の推定結果に基づく下位予測分布とを、混合比αa,t ,αz,t にて混合してなる混合分布に従ったパーティクルを生成し、そのパーティクルの重みを、観測部22が、観測データzt ,テンプレートtpn を用いて算出することにより、重みのあるパーティクルで表現された顔特徴点の位置の推定分布を求める。その推定分布に従うようリサンプルされたパーティクル、混合分布の生成に用いられた両予測分布に基づき、混合比算出部20が、推定分布と最も近似した混合分布が得られるよう事後的に求めた混合比を、次回の推定で使用する混合比αa,t+1 ,αz,t+1 として算出する。
(もっと読む)
データ処理装置
【課題】より少ない計算量でマッチング精度の向上を図る。
【解決手段】本ステレオ画像処理装置では、1フレームの基準画像において、処理対象とする4×4の相関元領域から左右に1画素分ずらした2つの参照領域につきそれぞれ相関演算が行われ、相関値Sn-1,Sn+1が算出され、これら相関値のうち相関のより弱いことを示すものが評価値とされる(ステップ2)。この評価値が所定のしきい値と比較されることによって、処理対象としている相関元領域について自己相関が強いか否かが判定される(ステップ3)。この判定の結果自己相関が強い場合に(ステップ3にてNo)、マッチングサイズを拡大させるよう設定される(ステップ5)。
(もっと読む)
画像処理装置およびその方法
【課題】 顔の特徴点の座標や格子状に分割した座標を用いて主成分分析を行っても、これら物理的特徴の変動には非線形の要素があるため、次元数は減らなかった。
【解決手段】 画像内に存在する物体の二次元画像を合成する際に参照されるモデル画像を合成パラメータに基づいて合成する。このとき、該合成パラメータは、例えば顔画像における目領域等、前記モデル画像を区分した複数の領域内における局所的な座標系に基づいて、該モデル画像の特徴点を示す情報を主成分分析することによって、効率的な次元圧縮がなされている。したがって、モデル画像においてより少ない次元数による形状表現が可能となる。
(もっと読む)
ビデオ前景の分割方法
疎な画像特徴の逐次クラスタリングを使用する、完全に自動的で計算が効率的なビデオ分割方法。ビデオ・シーンのエッジの特徴とコーナーの特徴の両方が前景のオブジェクトの輪郭を捕捉するために使用され、任意の形式のオブジェクトと移動/静止カメラについて機能を発揮する運動モデルを基に、特徴クラスタリングは作製される。ここで、カメラ及び/または前景と、前景と背景の間の深度の差とのために、2つのモーション・レイヤが仮定される。前景レイヤ及び背景レイヤに対するアフィン運動パラメータを計算し、同時に時間的な滑らかさを考慮するために、シーケンスならびに画像特徴の即時の置換に対して、逐次線形回帰が応用される。次に、時間的に効率的であり、カルマン・フィルタリングを使用して段階的に精緻化される疎な特徴クラスタリングに基づいて、前景レイヤが抽出される。 (もっと読む)
画像処理装置、および、画像処理方法、プログラム、並びに、記録媒体
【課題】 撮像画像の動きベクトルを、装置の移動に起因したものと回転に起因したものとに分離する。
【解決手段】 動きベクトル検出部は、tとt+1のフレームの動きベクトルを検出し、カメラ移動情報演算部は、カメラ回転動き補正部の処理によりカメラの回転動きが補正されたt−1フレームの画像データを基に、tとt−1のフレームの動きベクトルを検出する。カメラ動き分離部は、動きベクトルを、装置の移動に起因したものと回転に起因したものとに分離する。本発明は、撮像装置に適用できる。
(もっと読む)
顔認識装置および方法、係数生成装置および方法、プログラム、並びに記録媒体
【課題】 時間が経過しても確実に顔を認識することができる。
【解決手段】 顔画像抽出部32は、顔画像入力部31から供給された顔画像から、顔の領域を抽出する。特徴量算出部34は、顔が撮影された時点の日付と時刻、被写体である人の年齢、または顔を登録した時点から顔が撮影された時点までの時間などに対応する特徴量を算出する。認識部35は、特徴量算出部34から供給された特徴量を用いて、顔を認識する。本発明は、顔を認識する顔認識装置に適用できる。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および記録媒体
【課題】画像の識別を、精度良く行う。
【解決手段】ゲート算出部41は、入力画像の特徴的な部分の領域を表すゲート画像を求める。テクスチャ変換部42は、ゲート画像を用いて、入力画像から特徴的な部分の画像である部分画像を抽出し、部分画像を、その部分画像の画素値の統計的な性質を表す統計情報、あるいは部分画像の画素値のみに依存する画素値依存情報というべきテクスチャ情報に変換する。そして、テクスチャ情報を用いて、入力画像の識別が行われる。本発明は、例えば、人の顔が写っている画像を識別する装置などに適用できる。
(もっと読む)
紙葉類識別装置および紙葉類識別方法
【課題】紙葉類のクラスを効率的に推定し、かつ、媒体変動にロバストなパターン識別が可能となる紙葉類識別装置および紙葉類識別方法を提供する。
【解決手段】紙葉類から得られる画像パターンとあらかじめ設定される基準パターンとを比較することにより当該紙葉類の種類や真偽等を識別する紙葉類識別装置において、紙葉類の画像パターンを複数の領域(画素あるいは画素の集合)に分割し、重み付けや選択を行ない、領域ごとに識別結果を得て、その論理的な組み合わせで全体の識別結果を決定する。
(もっと読む)
パターンマッチング方法
【課題】図形テンプレートからの相対的な位置関係に応じてスコア値を設定したポテンシャル空間データを利用することにより、高速なパターンマッチング処理を実現したパターンマッチング方法を提供する。
【解決手段】本発明に係わるパターンマッチング方法は、認識対象物の画像を画像処理して図形テンプレートを生成するステップと、照合対象図形を測定点の集合として表示した測定点データを生成するステップと、図形テンプレートからの相対的な位置関係に応じて設定されたスコア値を記録したポテンシャル空間データを生成するステップと、ポテンシャル空間データと測定点データとを照合して測定点のスコア値を求めるステップと、求められたスコア値に基づいて照合対象図形と図形テンプレートとの類似度を算出して照合対象図形が認識対象物であるか否かを判定するステップとを含むことを特徴とする。
(もっと読む)
画像生成装置及び画像生成方法
【課題】 画像中に存在する関節物体が持つ形状、服装、動きなどのパラメータを反映した新たな画像を生成する画像生成装置等を提供する。
【解決手段】 関節物体を撮像した画像から、関節物体の特性を反映した新たな画像を生成する画像生成装置であって、関節物体を撮像した画像を取得する画像入力部101と、取得された画像中の関節物体に対して、あらかじめ保持した関節を有するモデルを当てはめることによって、関節物体の関節又は関節間部位の位置に関する第1パラメータを算出するパラメータ算出部102と、第1パラメータを用いて、関節物体の関節間部位の形状情報、第1パラメータには含まれない関節の位置及び動きに関する第2パラメータを推定するモデル変換を行うモデル変換部103と、第2パラメータを用いて、関節物体の特性を反映した新たな画像を生成する画像生成部104とを備える。
(もっと読む)
対象パターン検出方法及びその装置
【課題】対象パターンが与えられた場合に、画像中に存在するパターンを検出する対象パターン検出方法において、検出率を高く、誤検出率を低くする。
【解決手段】変換パラメータ加算器1004、変換パラメータ投票バッファ1006、出力変換パラメータ決定器1007を有し、対象物と非対象物の2値ビットマップ1002、輪郭候補点1003の2つを入力として変換パラメータ加算器1004が受理し、予め登録した2値ビットマップのテンプレート1001と照合を行って対象パターンを検出し、出力変換パラメータ決定器1007が変換パラメータを出力する。
(もっと読む)
車線認識装置
【課題】撮像された車輌前方の画像中から自車輌が走行する車線を的確に検出し、特に、急なカーブ等の複雑な道路形状や路面の汚れ、雨天等に影響され難く安定して車線を検出するとともに、車線分岐等をも的確に認識可能な車線認識装置を提供する。
【解決手段】車線認識装置1は、自車輌の進行路を撮像する撮像手段2と、撮像画像の設定領域における実空間上の距離Lを算出する画像処理手段6と、車線を検出する検出手段9とを備え、検出手段9は、輝度pnijと距離Lに基づいて道路面上の画素を車線候補点として検出し、車線候補点に対してハフ変換を行い、ハフ変換により得られる直線の中から少なくとも自車輌の位置又は挙動に基づいて車線としてふさわしい直線r1、l1を自車輌の左右に1本ずつ検出し、直線r1、l1を基準として車線候補点の中から車線ポジションを記録していくことで直線状または曲線状の車線LR、LLを検出する。
(もっと読む)
画像抽出方法、装置、および証明書用写真生成装置
【課題】カメラの視点、視線が6軸自由度を有する場合にも対応可能な、対象画像切り出し方法、および装置を提供することを目的とする。
【解決手段】第一の視点、視線で第一の画像を撮影し、第一の画像から少なくとも3点の特徴点を抽出し、任意の第二の視点、視線で第二の画像を撮影し、第一の画像内の特徴点に対応する第二の画像内の点を、少なくとも3点推定して対応する特徴点の組を3組抽出し、抽出した3組の特徴点の座標を基に、第一の画像と第二の画像とのずれ量を算出して第二の画像の座標を第一の画像に正規化し、第一の画像と正規化した第二の画像の対応する画素について画素値の差分を算出し、算出した差分が、予め設定した所定の閾値よりも大きい画素を、対象領域として抽出する。
(もっと読む)
画像計測方法、装置、プログラム及び記録媒体
【課題】ステレオ視を用い、1枚の画像上で測定範囲を設定するだけで画像内オブジェクトの実寸を算出する。
【解決手段】画像計測装置は、測定対象及び参照物体が同時に撮影された2枚の画像の撮影時のアフィン射影行列及び透視射影行列と、両画像間の拘束関係を与える行列とを算出する撮影情報算出部200と、一方の画像において対象領域を囲んで指定された矩形の辺を、参照物体の像の3つの辺の像の線形結合で表した際の結合係数を算出し、矩形の形状を修正する対象領域決定部300と、他方の画像において、矩形に対応する領域を対応対象領域として算出する対応対象領域決定部400と、透視射影行列と、対象領域での矩形の頂点位置と、対応対象領域での矩形の頂点位置を用いて、対象領域へのカメラ中心からの奥行と参照物体へのカメラ中心からの奥行を比較し、対象領域の頂点の3次元座標を算出する対象領域実寸算出部500と、を有する。
(もっと読む)
画像処理装置
【課題】各種画像フィルタを木構造状に組み合わせた処理プログラムを遺伝的プログラミングにより自動的に最適化できるACTITの手法を動画像中からの特定対象の抽出に拡張するとともに、オプティカルフローの手法を取り入れて動画像中から移動物体を精度良く抽出可能な画像処理装置を提供する。また、このような処理プログラムを容易に得ることができる汎用性の高い画像処理装置を提供する。
【解決手段】撮像装置21により撮像された画像に画像処理を施して画像中から特定の対象を抽出する画像処理装置1において、画像フィルタを木構造状に組み合わせた処理プログラムに従って、撮像装置21により撮像された動画像を構成する複数の画像およびそれらの画像から生成したオプティカルフロー画像に対して画像処理を施し、前記特定の対象が抽出された出力画像を形成するための画像処理部3を備える。
(もっと読む)
画像処理装置、および画像処理方法、並びにコンピュータ・プログラム
【課題】 画像間のずれの算出、画像補正処理を正確に実行する装置、および方法を提供する。
【解決手段】 複数の画像間のずれを算出するために実行する対応連結領域選択処理を、選択条件を変更して複数回実行する。例えば検索範囲を、広い設定から順次狭い設定に変更し、比較対象の特徴量情報の種類数は、多い設定から少ない設定に変更し、比較対象の特徴量情報の一致度は、厳しい設定から緩い設定に変更する。初期的に実行する粗調処理においては、2画像のずれ量が大きくても対応連結領域を発見できる。また、後半で実行する微調処理では、狭い範囲で、かつ緩い一致条件の下で、対応連結領域選択処理を実行するので、対応関係のある連結領域を効率的に抽出できる。本構成により、正確で効率的な画像間のずれ量算出、調整処理が可能となる。
(もっと読む)
画像処理装置、および画像処理方法、並びにコンピュータ・プログラム
【課題】 xy方向によって異なる倍率変動を持つ画像データについて正確な画像補正処理を実行する装置、および方法を提供する。
【解決手段】 複数の画像間のずれを補正する画像変換処理構成において、x方向とy方向それぞれの並行移動に対応した補正係数、(Δx,Δy)と、回転補正係数(θ)と、x方向とy方向それぞれの独立した倍率補正例数(βx,βy)の5種類の補正係数を生成し、これらの5種類の補正係数に基づく画像変換処理を実行する。本構成により、例えばスキャン画像など、原本画像に対して、x方向とy方向とで異なる倍率変動を持つ画像についても、xy各方向の独立した倍率補正係数に基づく正確な画像補正を行なうことができる。
(もっと読む)
不変視点からの画像照合および2次元画像からの3次元モデルの生成
複数の特徴を含む3次元ソースオブジェクトにおける特徴に対して、特徴付けを行い、かつ、基準オブジェクト間で不変視点検索を実行することにより、そのようなオブジェクトの基準データベースの中から最もマッチングする3次元オブジェクトを探索する方法およびシステムを提供する。本発明はさらに、基準オブジェクトを変形することによりソースオブジェクトの3次元表現を作成することを含む。  (もっと読む)
(もっと読む)
101 - 120 / 138
[ Back to top ]