
Fターム[5L096FA25]の内容
Fターム[5L096FA25]に分類される特許
121 - 138 / 138
画像処理装置及び画像処理方法

【課題】 対象物体の運動状態を高精度に推定可能な画像処理装置及び画像処理方法を提供することを課題とする。
【解決手段】 三次元形状が特定可能な対象物体の運動を求める画像処理装置1であって、撮像手段2と、対象物体の三次元モデルと、撮像手段2で基準の運動状態の対象物体を撮像した基準画像から対象物体の特徴点を検出する特徴点検出手段11と、検出した特徴点を用いて基準画像と三次元モデルとの位置の対応をとり、当該位置の対応がとられた基準画像と三次元モデルを用いて、対象物体の運動に対応する基準の運動状態の対象物体を撮像したときの撮像手段2とは異なる視点からの対象物体の画像を生成する画像生成手段12と、撮像手段2で任意の運動状態の対象物体を撮像した任意画像と画像生成手段12で生成した画像との差が小さくなるような対象物体の運動を推定する推定手段13,14とを備えることを特徴とする。
(もっと読む)
ブレ補正方法および撮像装置

【課題】画像のブレに対する信頼度に応じて動きベクトルを演算処理し、高精度に画像のブレを演算および補正できること。
【解決手段】撮像装置1は、画像信号を処理する画像処理部3を備え、画像処理部3は、画像のブレを補正する対象となる対象画像およびこの補正の基準となる基準画像を選択する画像選択部3bと、対象画像を複数の画素エリアに分割する画素エリア分割部3cと、画素エリアから少なくとも2つの対象画素ブロックを抽出する画素ブロック抽出部3dと、抽出された画素ブロックの動きベクトルを演算する動きベクトル演算部3eと、動きベクトルの信頼度をもとに各対象画素ブロックの重み付け係数を設定する重み設定部3fと、画像のブレに対応するアフィン変換の変換係数を演算する変換係数演算部3gと、この変換係数をもとに対象画像をアフィン変換してブレを補正する画像補正演算部3hと、を備える。
(もっと読む)
移動体追跡のための画像処理方法
【課題】移動体、前方走行車両等を局所的な照明変動下でカメラにより撮影された撮像フレ−ム内で追跡するための画像処理方法を提供する。
【解決手段】本発明による方法では、逐次入力された画像列から抽出された車両領域テンプレートを複数の小ブロックテンプレートに分割し、それぞれのブロックの位置を幾何学変換式により変化させながら、個々のブロックごとに色度を用いた相違度計算を行い、その相違度をもとに有効ブロックか無効ブロックかを判定し、無効ブロックを除いた有効ブロックのみでの有効平均相違度が最小となるブロックテンプレートの位置から車両領域テンプレート全体の照合位置を求める。
(もっと読む)
移動監視装置
【課題】 移動監視装置において監視領域の画像を高速かつ精度良く取得する。
【解決手段】 位置補正部111は位置認識部110で現在位置を把握しながら移動機構102を用いて本装置を監視領域周辺へ移動させる。監視領域周辺において、位置補正部111はセンサ101で取得した画像に基づいて本装置の位置を修正し、センサ101の撮影方向を監視領域へ向ける。さらに、画像補正部112はセンサ101が取得した画像を補正して、監視領域情報記憶部104が記憶する監視領域指示画像との視野の差異を軽減させる。補正後の画像を用いて監視を行う。
(もっと読む)
画像処理方法
【課題】2つの画像の対応点を簡単に自動的に求める。
【解決手段】対象物を、複数の異なる位置から撮影する。第1画像と第2画像のアフィンカメラ近似可能な領域内の平面近似可能曲面上に、人手により初期対応点を3組設定し、三角形を形成する。これらの初期対応点の座標に基づいて、両画像の三角形間のアフィン変換行列を求める。第1画像の三角形の重心(特定点)に対応する点として、第2画像上の対応点候補を求める。特定点の近傍画素群をアフィン変換して、テンプレートとする。第2画像上の対応点候補近傍で、テンプレートと第2画像上の画素群を比較する。最良の比較結果となる点を、特定点の対応点と決定する。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム及び携帯型端末
【課題】オブジェクトの輪郭抽出について、従来は抽出結果が間違っていた場合の影響が考慮されておらず、「できる限り正確に抽出する」だけのアプローチとなっていた。言い換えると、誤差が保証されない輪郭抽出となっていた。
【解決手段】概略抽出部で、原画像中のオブジェクトの大まかな輪郭(概輪郭)を抽出する。概輪郭を基に、形状抽出部で詳細な輪郭(詳細輪郭)を抽出する。概略抽出条件決定部は、テンプレートサイズなどの設定条件と必要な画像処理内容を決定し、概略算出部が設定条件で概輪郭を算出する。形状抽出条件決定部は、詳細輪郭の抽出に必要な条件の設定を行い、形状算出部で詳細輪郭を抽出する。このとき、予め決められた誤差範囲内に抽出結果が収まるよう、テンプレートサイズをはじめとする設定条件や詳細抽出条件などが決定される。
(もっと読む)
リアルタイムビデオ動き解析を通じたビデオコンテンツ理解
カメラ動き解析及び移動物体解析のための方法及び統合システム、並びに、ショットを変更することなく、主として、ビデオ及びビデオセグメントにおけるカメラ動きパラメータからセマンティクスを抽出する方法が説明される。このようなビデオの典型例は、デジタルカメラによって撮影されたホームビデオ及び業務用ビデオ又はフィルムのセグメント、すなわちクリップである。抽出されたセマンティクスは、注釈、ブラウジング、編集、フレーム強調、キーフレーム抽出、パノラマ生成、印刷、検索、要約等の複数のビデオ/画像の理解及び管理のアプリケーションに直接使用することができる。また、移動物体のアプリオリな知識に依拠しない、その移動物体の検出及び追跡を行う自動方法も説明される。これらの方法はリアルタイムで実行することができる。  (もっと読む)
(もっと読む)
オブジェクトのクラスを表す方法
【課題】オブジェクトをより低次元のパラメータを用いて表現する。
【解決手段】方法は、オブジェクトのクラスを表す。クラスのオブジェクトに対しサンプルの集合が取得され、各オブジェクトに対して1つのサンプルがあり、各サンプルは、オブジェクトの特性を表す複数のデータ値を含む。サンプルは、部分集合にグループ化され、各部分集合は、少なくとも1つの他の部分集合と交わる。各部分集合に対し、低次元パラメータ化が確定される。低次元パラメータ化の零空間が平均化され、オブジェクトのクラスの低次元表現を含む零空間を有する行列を取得する。
(もっと読む)
迷路パターン分析方法及びその装置
【課題】 迷路パターンにエンコードされたビットを抽出するために迷路パターンのイメージを分析する処理及び装置を提供すること。
【解決手段】 迷路パターンのグリッド線を判定し、バーの有効ピクセルの方向を推定し、クラスタにグループ化する。選択されたクラスタの有効ピクセルについて線を推定する。他のクラスタのグリッド線を判定する。推定された線を傾き分散分析に基づいて枝刈りし、距離分析に基づいてグループ化し、最もよくあう線を各グループから選択する。最もよくあう線からアフィンパラメータを判定する。迷路パターンの欠けている角のタイプを判定し、迷路パターンの正しい方位を得る。関連する迷路パターンセルのグレイレベル値を処理し、迷路パターンのイメージからビットを抽出する。
(もっと読む)
画像処理装置および方法、記録媒体、並びにプログラム
【課題】画像の拡大縮小に拘らず、物体を確実に認識することができるようにする。
【解決手段】 多重解像度生成部21により、モデル画像から多重解像度画像を生成し、特徴量抽出部23により各解像度の特徴点の特徴量を抽出し、モデル辞書登録部24に登録する。入力されたオブジェクト画像の多重解像度を多重解像度生成部31により生成し、その特徴点と特徴量を特徴量比較部35において、モデル辞書登録部24に登録されている特徴量と比較する。この比較は、kdツリー構築部34により構築されたkdツリーを利用して行われる。モデル姿勢推定部36は、特徴量比較部35による特徴量の比較結果に基づいて、オブジェクト画像に含まれるモデル画像の姿勢を推定し、その物体の姿勢パラメータを出力する。本発明は、ロボットに適用することができる。
(もっと読む)
パターン認識方法、それに用いられる教示データ生成方法およびパターン認識装置
【課題】欠陥データを生成して不足分を補い認識率を高めるパターン認識方法と、それに用いる教示データの生成方法を提供する。
【解決手段】教示ファイルに格納されている多数の教示データに基づいて学習し、パターン認識して欠陥判定をする外観検査装置であって、一のデータを変形して新たな教示データを生成する教示データ生成装置40を備えており、教示ファイル35中の多数の教示データのうち、データ数の少ない特定の教示データについては、その特定の教示データを変形して新たな教示データを生成し、その生成された教示データを前記教示ファイルに補充して欠陥認識させる。生成すべき教示データが画像データであるときは、画像の拡大、縮小、回転を含むアフィン変換と、明るさ、コントラスト、エッジ強度を含む属性変換を行うことにより、新たな教示データを生成する。
(もっと読む)
非線形の複数の動きモデル及び移動境界を抽出する方法及び装置
非線形の複数の動きモデル及び移動境界抽出のための方法(300)及び装置が開示されている。一実施形態においては、入力画像が受け取られ、その入力画像は領域/ブロックに分割され、新しい複数の動きモデルは、動き及び関連した移動境界(312)の抽出(308)のために、各領域に適用される。  (もっと読む)
(もっと読む)
撮影装置、撮影画像の画像処理方法及びプログラム
【課題】台座画像の輪郭を原稿画像の輪郭と誤判定しないようにして、原稿画像の輪郭を正しく取得する。
【解決手段】書画カメラ1に備えられた画像処理装置は、予め、台座13に原稿4が載置されていない状態で撮影を行って比較画像を取得する。そして、画像処理装置は、台座13に原稿4が載置された状態の縮小画像と比較画像とを比較して、その差分画像を取得する。画像処理装置は、差分画像を用いて台座画像の輪郭を除去し、原稿画像の輪郭を取得する。
(もっと読む)
画像処理方法、画像処理装置
【課題】 簡便に対象の個別同定を行うための技術を提供すること。
【解決手段】 特徴抽出部23は画像に含まれている注目対象の各特徴を検出し、局所領域設定部24は検出した特徴のうち、対象の形状を得るための特徴群を包含する局所領域、位置関係を得るための特徴群を包含する局所領域を設定し、特徴ベクトル生成部25は設定された局所領域内の特徴ベクトルデータを求め、物体認識部26は特徴ベクトルに基づいて注目対象がそれぞれ異なる対象の何れであるかの特定を行う。
(もっと読む)
距離、局所線形構造およびアフィン対称を用いた画像クラスタリング
異なる視点位置から見られるオブジェクトのクラスタリング画像に関するシステムおよび方法を開示する。すなわち、未分類のn個のオブジェクトの画像セットが与えられた場合に、教師なしアルゴリズムが、各サブセットが単一のオブジェクトの画像のみを含むように、画像をN個のバラバラのサブセットにグループ化する。クラスタリング方法は、外観多様体の幾何学と二次元アフィン群の対称性との間の相互作用を利用した広範な幾何学的枠組みを利用する。  (もっと読む)
(もっと読む)
部分空間の逐次更新を伴う適応型確率的画像追跡
動画ビデオ内においてオブジェクトの適応型確率的追跡を行うためのシステムおよび方法(図2)を開示する。本方法では、時間によって変化する固有基底218と、動的モデル224と、観測モデル230と、推論モデル236とを利用する。固有基底218は、オブジェクトのモデルとして利用される。動的モデル224は、オブジェクトの動きを表現し、前の位置に基づいてオブジェクトの予想位置を定義する。観測モデル230は、現在の固有基底218とオブジェクトの観測結果との距離を測定する。推論モデル236は、過去と現在の観測結果に基づいて、オブジェクトの最も可能性の高い位置を予測する。  (もっと読む)
(もっと読む)
画像間のアフィン関係を推定する方法
第1の画像と第2の画像とのアフィン関係を推定する方法(400)が開示される。第1の画像及び第2の画像の各々は、少なくとも4本の互いに平行でない線を有する。方法(400)は、各々の画像の中に現れる線の複数組の交点を識別すること(406)により開始される。次に、方法(400)は、第1の組の交点及び第2の組の交点から、交点間に関係が存在するか否かを判定する(412)。関係が存在する場合、第1の画像及び第2の画像はアフィン関係にあり、アフィン歪は反転されてもよい(418)。 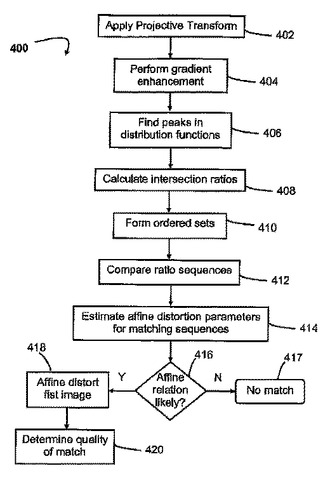 (もっと読む)
(もっと読む)
画像位置合わせ方法の改良
【解決手段】 2つの画像を関連付ける変換の少なくとも回転パラメータ及び変倍パラメータを判定する方法(200)が開示される。方法(200)は、画像の平行移動に対して不変量である各画像の空間領域表現を形成することにより開始する。次に、Log−Polar領域における相関が、表現の間で実行される。相関における大きさのピークの検出後、方法(200)は、大きさのピークの位置から、回転パラメータ及び変倍パラメータを判定する。 (もっと読む)
121 - 138 / 138
[ Back to top ]