
Fターム[5L096FA25]の内容
Fターム[5L096FA25]に分類される特許
21 - 40 / 138
ステレオ画像による3次元位置姿勢計測装置、方法およびプログラム
【課題】ステレオ誤対応データが含まれていても、対象物の3次元位置姿勢を計測することができる装置、方法及びプログラムを提供する。
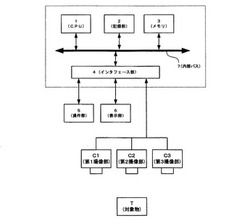
【解決手段】3次元位置姿勢計測装置は、撮像装置C1〜C3によって対象物を撮像して得られた画像データを受信する入力部4と演算部1とを備え、演算部が、重複することなく選択された2枚の画像データのペアに関して、3次元復元点集合および特徴量集合を求め、各ペアに関する3次元復元点集合および特徴量集合を、全て加算して全3次元復元点集合および全特徴量集合を求め、対象物のモデルデータに関するモデル特徴量集合を、全特徴量集合と照合することにより、3次元復元点集合の中から対象物のモデル点に対応する点を決定し、3次元復元点集合が、画像データ中の対象物の境界線を分割したセグメントの3次元位置情報を含み、特徴量集合が、セグメントの頂点に関する3次元情報を含む。
(もっと読む)
ボトリング製品検索装置

【課題】特定の規約に基づくIDコードの設定等を行うことなく製品検索ができるボトリング製品検索装置を提供する。
【解決手段】ボトリング製品のラベル貼付部をカメラにより撮影したカメラ撮影画像から対象ボトリング製品を検索するボトリング製品検索装置であって、ラベルのボトル貼付面への中心投影画像に外接する矩形枠を所定のアスペクト比に座標変換して正規化したインデックス画像をボトリング製品の属性に関連付けて格納するデータ格納部と、前記カメラ撮影画像から抽出したラベル画像に外接する矩形枠を座標変換して前記インデックス画像のアスペクト比に一致させる画像変換部6と、画像変換部6での出力画像をインデックス画像中から検索して撮影したボトリング製品を特定する検索部7と、を有する。
(もっと読む)
画像検索方法およびシステム
【課題】窓や柱などの同一形状物を多数備える建物画像のように、似通った形状物を多く備える被写体の画像を比較する場合でも対応点を正確に識別できる画像検索方法およびシステムを提供する。
【解決手段】図10(a)のクエリ画像Iqおよび図10(b)の類似画像候補(街並画像)Iwcのペアからは2組の対応点候補[q1,w1]および[q2,w2]が抽出されている。一方の対応点候補[q1,w1]については、クエリ画像Iq側の対応点q1の縦位置が出現パターン[N1-N2-N3…]のN1の位置であるのに対して、類似画像候補Iwc側の対応点w1はN3の位置であり、両者はズレ量が多いので破棄される。他方の対応点候補[q2,w2]については、クエリ画像Iq側の対応点q1の縦位置が出現パターン[N1-N2-N3…]のN2の位置であり、類似画像候補Iwc側の対応点w2も同様にN2の位置であり、両者は距離が近いので対応点とされる。
(もっと読む)
動きベクトル検出装置、フレーム補間処理装置およびそれらの方法
【課題】 精度の高いGMVパラメータを取得する。
【解決手段】 展開後動きベクトル手段11は、GMVパラメータが与えられると、各ブロックについてのLMVに展開した展開後LMVを演算する。計算対象ブロック決定手段17は、各ブロックについて、前記展開後LMVと、ブロック別動きベクトル演算手段3が演算したLMVとの差が閾値記憶手段15に記憶された閾値内であるブロックを計算対象ブロックとして決定し、決定した計算対象ブロックについてのブロック別動きベクトル演算手段3が演算したLMVを平行移動パラメータ演算手段6に計算対象ブロックとして与える。繰り返し手段11は、計算対象ブロック決定手段17の処理を所定回数、繰り返す。その際繰り返し回数が増える度に閾値記憶手段15の閾値を小さくして、繰り返し処理を行う。
(もっと読む)
階層マスク生成装置、フレーム補間処理装置
【課題】 高精度で高い演算速度の探索を行う。
【解決手段】 ブロック設定手段511は、代表ブロック座標について、大きさの異なるブロックを設定する。探索範囲候補特定手段521は、前記異なる大きさのブロック毎に第n+αフレームの探索範囲を探索範囲候補として特定する。相対割合演算手段523は、前記代表ブロック座標で特定される第nフレームのブロック内における移動オブジェクトの占める相対割合を演算するとともに、対応する前記第n+αフレームについて、前記各探索範囲候補の探索範囲内における移動オブジェクトの占める相対割合を演算する。決定手段525は、前記相対割合が大きなブロックに対応する探索範囲候補を、前記代表ブロック座標で特定されるブロック探索範囲として決定する。
(もっと読む)
画像のシーケンス内のオブジェクトのリアルタイム表現のハイブリッド型追跡のための方法、コンピュータプログラム、および装置
本発明は、具体的には、少なくとも1つのキー画像(key image)を使用する、画像のシーケンス内のオブジェクトの表現のハイブリッド型追跡に関する。追跡されるオブジェクトの表現を含む第1の画像および第2の画像を得た後、第1の画像部分が第1の画像内で識別され、第2の画像部分がキー画像から取り出される。第1の画像の第1の画像部分に類似する、第2の画像の第1の画像部分の相対姿勢が推定される。キー画像の第2の画像部分に類似する、第1の画像または第2の画像の第2の画像部分が探し出される。次に、オブジェクトの相対姿勢が、第1の画像部分および第2の画像部分の相対姿勢に従って推定される。  (もっと読む)
(もっと読む)
画像処理装置
【課題】顔画像に重なっている遮蔽領域を正確に検出することが困難であった。また、遮蔽領域を正確に検出できないために、各種処理において遮蔽領域の影響を受けた不適切な処理結果が生じていた。
【解決手段】注目画像に含まれる顔の少なくとも一部を含む領域の画像を顔画像として取得する顔画像取得部と、遮蔽領域の検出のための基準画像として用いられる基準顔画像を取得する基準顔画像取得部と、上記顔画像と基準顔画像とを比較することにより、上記顔画像内において、顔を構成する要素以外の要素によって遮蔽された遮蔽領域を検出する遮蔽領域検出部とを備える構成とした。
(もっと読む)
画像処理装置及びコンピュータプログラム
【課題】枠を有する画像を特徴づける特徴量を求めるにあたり、例えば当該画像が回転・平行移動・拡大縮小等による歪みを受けている場合であっても、枠を構成する線分の配置を正しく求め、当該線分の配置に基づいて特徴量を導出すること。
【解決手段】本発明に係る画像処理装置1は、画像に含まれる線分を抽出する線分抽出手段と、抽出された前記線分のうち、予め定められた基準に基づき線分を選別する線分選別手段と、選別された前記線分のうち、前記画像の各端縁にそれぞれ略平行である線分を該各端縁からの距離に基づき選び、前記画像を特徴づける特徴量を導出する特徴量導出手段と、前記特徴量導出手段により選ばれた線分により囲まれる領域の大きさに基づき選定された一の画像の特徴量に他の画像の特徴量を一致させる線形写像を導出する線形写像導出手段と、前記一の画像と、前記線形写像導出手段により導出された線形写像により変換された他の画像とを比較する画像比較手段と、を有する。
(もっと読む)
画像における物体の変位可能な特徴を正規化するための方法
【課題】画像における物体の変位可能な特徴を正規化するための方法を提供する。
【解決手段】方法は、画像における物体の特徴を正規化する。物体の特徴は、2D画像又は3D画像から抽出される。特徴は、物体における変位ゾーン内で変位可能であり、特徴は、変位ゾーン内のロケーションを有する。特徴の関連付けられた記述子が求められる。次に、特徴は、変位ゾーンにおける最良のロケーションに変位されて、正規化された特徴が作成される。
(もっと読む)
画像認識装置、撮像装置及び画像認識方法
【課題】画像に含まれる人物の表情や個人を高精度に識別できるようにする。
【解決手段】パラメータ設定部1300は、顔検出部1100による顔検出結果に基づいて、画素値の勾配方向及び勾配強度を示す勾配ヒストグラムを生成するためのパラメータを設定する。さらに、勾配ヒストグラム特徴ベクトル生成部1400は、検出された顔の領域から、勾配ヒストグラムを生成する対象となる領域(1セル)を設定し、その領域毎に勾配ヒストグラムを生成して特徴ベクトルを生成する。そして、表情識別部1500において、検出された顔の表情を、SVMを用いて識別する。
(もっと読む)
画像検索装置およびその方法
【課題】幾何的に対称な部分が存在する画像の検索に関して、類似する特徴点の組み合わせを適切にし、無為に対応点候補個数を増やすことなく検索することを可能にする。
【解決手段】画像検索装置は、クエリ画像より互いに対応する特徴点の対を取得し、取得された特徴点の対に基づいて対称性を有する部分画像を抽出し、部分画像をその対称軸で分割して得られる2つの部分領域のそれぞれを、当該部分画像における画像特徴の傾向に基づいて第1領域と第2領域に決定する。クエリ画像と比較先画像の類似性の判定においては、両画像の第1領域に決定されている部分領域から抽出された特徴点の対に基づいて座標変換処理のための座標変換係数が設定され、当該両画像の第1領域以外の領域を含む領域から抽出された特徴点の対に対して上記座標変換係数を用いた座標変換処理を適用して、座標変換処理後の特徴点の対の座標が比較される。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、および、印刷装置
【課題】本発明は、複数の表情を精度よく判別することを目的とする。
【解決手段】注目画像に含まれる顔の表情を判定するにあたり、前記注目画像から顔画像の少なくとも一部を含む画像領域を顔領域として検出し、複数の特徴量に基づいて少なくとも顔の特徴部位の位置を再現する顔モデルを設定し、前記顔モデルによって再現される前記特徴部位の位置が、前記顔領域に近似するように前記特徴量を補正し、前記補正された前記特徴量に基づいて複数の表情ごとに判定値を算出し、各表情についての判定値を総合して顔の表情を判定する。
(もっと読む)
画像検索装置およびその方法
【課題】処理負荷を多くする事無くクエリからの特徴点の選択の反復回数を大きい数にすることを可能にする。
【解決手段】入力されたクエリ画像と登録されている比較先画像との類似を判定して、該クエリ画像に類似する画像を検索する画像検索装置は、クエリ画像から選択された特徴点と比較先画像の特徴点とをそれら特徴点の特徴量に基づいて対応付けることにより、2つの画像において対応する複数対の特徴点を抽出する。そして、複数対の特徴点から、少なくとも2対の特徴点を取得し、それらの各対に関して、2つの画像のうちの一方の画像の特徴点の座標が他方の画像の特徴点の座標と一致するように座標変換処理するための座標変換係数を決定する。そして、上記座標変換係数を用いた座標変換処理による座標の変換量があらかじめ指定された制約条件を満足する場合にのみ、2つの画像の類似判定のために、上記複数対の特徴点に関して上記座標変換係数を用いた座標変換処理を施し、一方の画像の変換後の特徴点の座標と他方の画像の対応する特徴点の座標とを比較する。
(もっと読む)
認証装置
【課題】多様性の影響が小さくて認証精度が高い認証装置を提供する。
【解決手段】中央演算処理装置と、入力部と、形状主成分、テクスチャ主成分及び母音(あ、い、う、え、お)又は撥音(ん)の特徴量を表すパラメータが関係付けられたデータベース並びに第1の文字列を含む記憶装置と、出力部とを備え、中央演算処理装置は、顎と唇を含む顔の下半分形状を表す画像データ列から特徴量を表すパラメータ計算し、そのパラメータとデータベースを基に画像データを母音(あ、い、う、え、お)及び撥音(ん)のいずれか一つに対応付けすることにより第2の文字列を生成し、第1及び第2の文字列が一致する場合に認証を許可する結果を出力部に出力するステップを実行させるプログラムを備える。
(もっと読む)
特徴区間判定装置、特徴区間判定方法、およびプログラム
【課題】カメラ動作の速度に依存せずに、画像の特徴区間を適切に判定可能な、特徴区間判定装置、特徴区間判定方法、およびプログラムを提供する。
【解決手段】画像における所定の分割領域の時系列データから画像の動き量aを算定する動き量算定部111と、画像の時系列データから画像の特徴区間を判定するための判定区間Laを設定する判定区間設定部113と、判定区間の特性に応じて、画像の特徴区間を判定するための判定基準Taを適応的に設定する判定基準設定部115と、判定区間内における画像の動き量を判定基準と比較し、判定区間が画像の特徴区間であるかを判定する特徴区間判定部117と、を備える。これにより、判定区間の特性に応じて判定基準を適応的に設定し、動き量と比較して判定区間が特徴区間であるかを判定するので、カメラ動作の速度に依存せずに、画像の特徴区間を適切に判定することができる。
(もっと読む)
顔の特徴部位の座標位置を検出する画像処理装置
【課題】本発明は、画像に含まれる顔の特徴部位の位置を検出する処理の効率化・高速化を図ることを目的とする。
【解決手段】注目画像に含まれる顔の特徴部位の座標位置を検出する画像処理装置は、注目画像より時間的に前に座標位置の検出がなされた画像である被検出画像の座標位置の検出に関連する情報である検出情報を記憶する記憶部と、座標位置の検出に用いられる特徴点の注目画像における初期位置を設定するために注目画像上に規定される注目画像規定領域を、注目画像に含まれる顔画像に基づいて検出するか、もしくは、被検出画像における初期位置を設定するために被検出画像上に規定された被検出画像規定領域に基づいて特定するかを検出情報に基づいて、判定する処理判定部と、初期位置に設定された特徴点の設定位置を座標位置に近づけるように更新し、更新された設定位置を座標位置として検出する特徴位置検出部と、を備える。
(もっと読む)
画像処理装置、それを備えたデジタルカメラ及び画像処理プログラム
【課題】 動画等の時系列的に前後する画像間の位置ずれ量の検出を高精度に行える画像処理装置、それを備えたデジタルカメラ及び画像処理プログラムを提供する。
【解決手段】 画像処理装置(16,20)は、時系列的に前後する画像1と画像2との間の変化量を検出する為、手段A(20)が、入力の位置ずれ量をパラメータにして画像1での画素群αに幾何変換を実施し、変換後の画像1における画素群αの画素と、該画素群αの画素と同一座標にある画像2中の画素との輝度差に基づきゲインを算出する。また手段B(20)が、入力のゲインを画像2に乗算し、画像1から画素群βを抽出し、画像1とゲイン乗算後の画像2との間における画素群βの位置の変化量を推定して位置ずれ量を算出する。そして検出手段(20)が、手段Aに手段B算出の位置ずれ量を入力し、手段Bに手段A算出のゲインを入力して、手段Aと手段Bとを少なくとも1回以上実行する。
(もっと読む)
画像処理装置、カメラモーション成分算出方法、画像処理プログラム及び記録媒体
【課題】フレーム画像データの品質を向上させる。
【解決手段】フレーム画像からなるフレーム画像データから、フレーム画像全体の動きを表す動きベクトルであるグローバル動きベクトルGMVを検出する。画像処理部は、未知の成分パラメータθ、s、h、v、e及びbを用いることにより、検出されたグローバル動きベクトルGMVを成分分離式にモデル化する。成分分離式では、カメラの動きを表すカメラモーション成分CM及びフォーカルプレーン歪みの変化量を表すフォーカルプレーン歪み成分CFが分離されている。成分分離式において用いられた成分パラメータθ、s、h、v、e及びbを算出することにより、グローバル動きベクトルGMVにおけるカメラモーション成分CMを算出する。
(もっと読む)
顔画像の所定のテクスチャー特徴量を変更する画像処理
【課題】顔画像における所定のテクスチャー特徴量を変更する画像処理のさらなる質の向上を実現する。
【解決手段】画像処理装置は、互いに異なる顔画像サイズに対応する複数の基準形状と互いに異なる顔画像サイズに対応する複数のテクスチャーモデルとを特定する情報を記憶する記憶部と、対象画像における顔の特徴部位の位置を特定する顔特徴位置特定部と、対象画像における顔画像サイズに基づき基準形状とテクスチャーモデルとを選択するモデル選択部と、対象画像における顔形状が選択基準形状と等しくなるようにて第1の変換を行う第1の画像変換部と、選択テクスチャーモデルを用いて第1の変換後の対象画像における所定のテクスチャー特徴量を変更する特徴量処理部と、特徴量変更後の対象画像に対して第1の変換の逆変換を行う第2の画像変換部と、を備える。
(もっと読む)
画像処理プログラム、画像処理装置、および撮像装置
【課題】 複数のディジタル画像の位置合わせにおいて、局所解に陥る可能性を低減しつつ、高精度な位置合わせを実現すること。
【解決手段】 2つの画像の位置合わせをコンピュータで実現するための画像処理プログラムであって、2つの画像を取得する取得ステップと、複数のパラメータを用いて、位置合わせに関する評価値を、2つの画像に基づいて算出する算出ステップと、複数のパラメータのそれぞれの重みを設定する設定ステップと、設定ステップにおいて設定された異なるパラメータを用いて算出ステップにおいて算出された複数の評価値を比較して、2つの画像の相対的な位置を検出する検出ステップとを備える。
(もっと読む)
21 - 40 / 138
[ Back to top ]