
Fターム[5L096FA34]の内容
Fターム[5L096FA34]に分類される特許
61 - 80 / 771
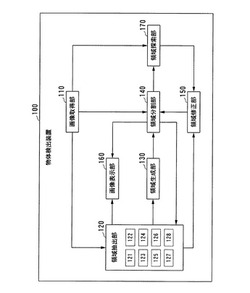
物体検出装置
【課題】走行する車両等から撮像された時系列画像に撮像された物体を、精度良く検出することができる物体検出装置を提供する。
【解決手段】物体検出装置100は、物体が撮像された時系列画像を取得する画像取得部110と、回帰直線により物体の動き量を最適化し、最適化した動き量に基づいて、物体が撮像された領域を時系列画像から抽出し、該領域の分布情報を出力する領域抽出部120と、領域の分布情報と時系列画像とを取得し、分布情報が表す領域を、時空間MRFによって物体毎に分割することにより、該領域に撮像された物体を検出する領域分割部140とを備える。
(もっと読む)
画像処理装置、撮像装置、及びそれらの制御方法

【課題】映像中の対象物の動きの質に応じて、撮像時のボケの低減とランダム感の抑制とを両立可能な技術を提供する。
【解決手段】画像処理装置は、動く対象物を撮像した映像信号であって、前記対象物のぶれを含まない第1の映像信号と前記対象物のぶれを含む第2の映像信号とを入力する入力部と、映像信号を解析して前記対象物の動きを検出する動き検出部と、検出された動きの質に応じて、前記第1の映像信号と前記第2の映像信号を切り換え又は合成することにより出力映像信号を生成する出力制御部と、を有する。出力制御部は、等速度又は等加速度の動きである場合には第1の映像信号を、等速度又は等加速度の動きでない場合には第2の映像信号を出力する。或いは、等速度又は等加速度の動きでない場合には、等速度又は等加速度の動きである場合に比べ、第2の映像信号の重みを大きくする。
(もっと読む)
動画オブジェクト検出装置、方法、及びプログラム
【課題】オブジェクトの誤検出と検出漏れとの双方を抑制する。
【解決手段】オブジェクト検出手段12は、動画像のフレーム画像からオブジェクトを検出し、検出したオブジェクトの位置をオブジェクトリスト記憶部14に記憶する。オブジェクト追跡処理手段13は、オブジェクトリスト記憶部14に記憶されたオブジェクトの位置を、そのオブジェクトが検出された時刻以後、複数フレーム間で追跡し、オブジェクトリスト記憶部14に記憶する。また、オブジェクト追跡処理手段13は、オブジェクト検出手段12でオブジェクトが新たに検出されたとき、その新たに検出されたオブジェクトの位置を、オブジェクトが検出されたフレーム画像の時刻よりも前の時刻に遡って複数フレーム間で追跡し、オブジェクトリスト記憶部14に記憶する。
(もっと読む)
駐車検出装置、駐車検出方法および駐車検出プログラム
【課題】多数の駐車マスを持つ駐車場の各駐車マスの駐車状況を正確に検出することができる駐車検出装置、駐車検出方法および駐車検出プログラムを提供する。
【解決手段】駐車検出装置は、表示パターンが描かれた複数の駐車マスを含む検出対象エリアを撮影する撮影手段と、空車状態の検出対象エリアの画像に対してエッジ抽出処理を施して基準画像データを生成する基準データ生成手段と、対象画像に対してエッジ抽出処理を施して対象画像データを生成する対象データ生成手段と、表示パターンの位置を中心として基準画像データを所定範囲でシフトさせ、その各位置において基準画像データと対象画像データとの相関率を算出することにより、各位置に対する相関率の分布を相関率分布として得る相関率分布算出手段と、相関率分布の特徴に基づいて駐車の有無を判定する判定手段と、を備えている。
(もっと読む)
動作評価装置並びに類似度評価方法及び動作評価・確認方法
【課題】比較的単純な処理によって汎用的に動きのリズム等を評価できる動作評価装置を提供する。
【解決手段】評価対象の映像の時系列をなす各フレームの直接の画素値からなる、特徴量の時系列に対して主成分分析を施し、該特徴量の時系列を固有値毎に、主成分得点の時系列に変換する主成分得点変換部2と、主成分得点の時系列を周波数解析してスペクトル情報を得る周波数解析部3とを備える動作評価装置1を提供する。前記直接の画素値からなる特徴量は、各画素のフレーム内位置に基づく所定の順に、各画素の画素値を並べたベクトルとして与える。
(もっと読む)
動きベクトル検出装置、動きベクトル検出方法、および、動きベクトル検出プログラム
【課題】撮像装置または照度変化に由来して複数の画像間に輝度差が生じる場合でも、精度良く動きベクトルを検出する。
【解決手段】第一の画像上の複数の領域について、第一の画像とは異なる第二の画像との間の動きベクトルを検出する動きベクトル検出装置は、複数の領域ごとに、第二の画像上で相関性の高い領域を求めることによって、第一の画像と第二の画像との間の第一の動きベクトルを算出する第一動きベクトル算出部101と、第一の動きベクトルの信頼性を判定する信頼性判定部102と、第一の動きベクトルの信頼性が高いと判定された領域内の画素について、第一の画像と第二の画像との間の輝度差を算出する輝度差算出部104と、輝度差を用いて、第一の動きベクトルの信頼性が低いと判定された領域の第二の動きベクトルを算出する第二動きベクトル算出部106とを備える。
(もっと読む)
重み付きテンプレートマッチング実行装置およびプログラム
【課題】マスキングを含む、重み付き相関を高速にかつ精度良く計算する。
【解決手段】FFTを用いて高速に演算する。テンプレート登録画像(テンプレート表示部102に表示)と、テンプレート側の重み(テンプレート側重み表示部103に表示)を持って、参照画像(参照画像表示部104に表示)と重み付きマッチングを行い、所定の閾値よりマッチングの評価値が高い位置(検知位置109の枠で表示)を検知する。重み付き相関はFFTを用いた高速な方法で行う。その他、参照画像側にも重みを付けることができ、FFTを用いた高速な方法で演算できる。
(もっと読む)
目立ち画像生成装置及び目立ち画像生成プログラム
【課題】評価対象の目立ちを色の差異を反映して定量的に評価する。
【解決手段】評価対象を撮像した撮像画像に対し、前記評価対象と周囲との色差が無い場合に目立ちが無いと評価し、前記評価対象と前記周囲との色差対比量が大の場合に、その大きさの度合いに応じて前記評価対象の目立ちを高く評価する色差目立ち評価部29と、前記色差目立ち評価部29の評価結果に基づいて、前記撮像画像の色差による目立ちの分布を示す目立ち画像を生成する画像化部25とを備える目立ち画像生成装置11を構成した。
(もっと読む)
駐車検出装置、駐車検出方法および駐車検出プログラム
【課題】多数の駐車マスを持つ駐車場の各駐車マスの駐車状況を正確に検出することができる駐車検出装置、駐車検出方法および駐車検出プログラムを提供する。
【解決手段】駐車検出装置1は、表示パターンが描かれた複数の駐車マスを含む検出対象エリアを撮影する撮影手段(カメラ10)と、空車状態の検出対象エリアの画像に対してPrewittエッジ処理を施して基準画像データ23dを生成するとともに画素毎の積和値が最大となったマスクパターンをエッジオペレータとして記憶する基準データ生成手段(エッジ抽出処理部24)と、判定対象の画像に対してエッジオペレータによるエッジ抽出処理を施した被検査画像データ(エッジ抽出処理画像データ23c)を生成する検査データ生成手段(エッジ抽出処理部24)と、被検査画像データと基準画像データとの相関から駐車の有無を判定する判定手段(相関率算出部25、相関率判定処理部26)と、を備える。
(もっと読む)
物体検出装置および物体検出方法
【課題】姿勢変動を伴う対象物について当該対象物を構成する各部の相対位置を考慮せずに当該対象物を高い検出率で検出可能にする。
【解決手段】物体検出方法は、前記特定の物体に関する姿勢パラメータと、画像の部分特徴と、該姿勢パラメータにおいて該部分特徴の局所画像が画像に存在する確率とを対応付けて記憶する記憶部を用いる。この物体検出方法では、検出対象の画像より局所画像を抽出して部分特徴を取得し、検出対象の画像とは無関係に複数の姿勢パラメータを入力する。そして、当該方法は、複数の姿勢パラメータの各々について記憶部に記憶された確率の順に所定数の部分特徴を選択し、取得された部分特徴と選択された所定数の部分特徴との相関の度合いを示す照合度を算出する。生成された複数の姿勢パラメータに関して算出された照合度に基づいて、検出対象の画像に特定の物体が存在するか否かが判定される。
(もっと読む)
画像検索装置、画像検索方法及び画像検索プログラム
【課題】検索対象画像内でテンプレート画像と類似している画像領域を高速に検索することができる画像検索装置を提供する。
【解決手段】検索対象画像内において、テンプレート画像と類似している画像領域を検索する画像検索装置であって、検索対象画像とテンプレート画像とを入力する画像入力手段と、テンプレート画像と検索対象画像間において検索位置を移動しながら、粗い類似尺度の値を求め、求めた類似尺度の値が最良となる検索位置を特定し、該検索位置における詳細な類似尺度の値を求める初期閾値設定手段と、初期閾値設定手段により求めた検索位置における詳細な類似尺度の値を検索閾値の初期値として用いて、画像領域の検索を行う画像検索手段とを備えた。
(もっと読む)
衝突時間算出装置、衝突時間算出方法及びプログラム
【課題】適切なタイミングで、ドライバーに警報を発する。
【解決手段】自車に接近する接近車両についてのオプティカルフローを用いて、接近車両が、自車に搭載された撮影装置20の光学中心を含む面に到達するまでの到達時間を算出する。そして、この到達時間に基づいて、接近車両が自車に衝突するまでの衝突予測時間を算出する。この衝突予測時間は、接近車両が自車から離れていても、接近車両の移動軌跡を示すベクトルの大きさと、オプティカルフローの大きさとの間に生じる誤差の影響を大きく受けることなく算出される。したがって、事前に自車と接近車両とが衝突するまでの衝突予測時間を算出することで、適切なタイミングで、ドライバーに衝突を回避するための警報を発することが可能となる。
(もっと読む)
動画像処理装置、動画像情報処理プログラム、及び動画像処理方法
【課題】少ない演算量でもカメラ移動量を算出することができる動画像処理装置、動画像情報処理プログラム、及び動画像処理方法を提供すること。
【解決手段】移動する撮像装置によって撮像された動画像から撮像装置の移動量を算出する動画像処理装置1であって、動画像の画面表示を複数の矩形領域に分割してそれぞれ直交変換する分割処理部7と、矩形領域に隣接する複数の矩形領域の交流成分を加算しながら順次相関ブロックを生成するブロック算出部8と、相関ブロックのうち、前景画像に相当する相関ブロックと、背景画像に相当する相関ブロックのうち、空間周波数の上位側及び下位側となる相関ブロックと、をそれぞれ排除するブロック選定部10と、残った相関ブロックにて連続する画像間の相関量を算出する相関演算部11と、最も相関量の高いものから移動量を算出する移動量算出部12と、を備えている。
(もっと読む)
パターンに基づくコンピュータビジョンを用いるコンピュータ装置のための入力
【課題】ユーザの足や手の近接度を追跡する技術を提供する。
【解決手段】カメラから取得した、面上に形成された構造的に符号化されたパターンの少なくとも一部の画像を解析してカメラの位置を決定する。前記構造的に符号化されたパターンは複数の要素を含む。各要素には前記面に関する前記要素の位置および向きを特定する情報が符号化されている。コンピュータプログラムが、前記画像中の一またはそれ以上の要素の少なくとも一部を特定し、前記画像中の前記一またはそれ以上のパターン要素に符号化されている前記情報から、前記面に対する前記カメラの位置を決定する。
(もっと読む)
対応点探索のための画像処理方法
【課題】
対応点探索において、NCCフィルタリングに関するジレンマを解決する。
【解決手段】
画像パッチ間の類似性を比較する方法であって、それぞれが少なくとも一つの画像パッチを供給する少なくとも2つの画像供給源から、少なくとも2つの画像パッチを受信するステップと、受信された画像パッチを比較するステップと、を有し、前記比較するステップは、各画像パッチから複数の対応関係にある部分画像ペアを抽出するステップと、すべての前記部分画像ペアの間で正規化局所類似度スコアを算出するステップと、すべての前記部分画像ペアの局所類似度スコアの総和を計算して総マッチングスコアを算出するステップと、総マッチングスコアを画像パッチの類似度指標として用いて、総マッチングスコアに基づき、対応関係を持つ類似画像パッチを決定するステップとを有する。
(もっと読む)
物体認識装置、物体認識方法、及びコンピュータプログラム
【課題】 物体認識に対して大きな影響を与えない特徴点を間引き、演算量を低減する。
【解決手段】 領域aにフィルタ(分布密度フィルタ)1を作用させた場合は、特徴点の密度が低いため特徴点は間引かれる。一方、領域bにフィルタ1を作用させた場合は、特徴点の分布密度が高いため特徴点は残る。また領域cにフィルタ(縦線フィルタ)3を作用させた場合、特徴点は横線の分布を示し特徴点の分布密度が小さくなるため、ここでは間引き候補であるが、フィルタ(横線フィルタ)を適用する際に大きな値を示すので特徴点が残る。また、領域dにフィルタ(縦線フィルタ)3を作用させた場合、特徴点は縦線の分布を示し分布密度が大きくなるため、特徴点は残る。このように、特徴点に対してフィルタリング処理を行うことにより、物体認識に対して大きな影響を与えない特徴点を、効果的に間引くことができる。
(もっと読む)
画像分類装置及びプログラム
【課題】画像の空間周波数スペクトルに基づいて画像を分類する画像分類装置及びプログラムを提供する。
【解決手段】本発明の画像分類装置(1)は、入力される画像をスペクトルのデータに変換するスペクトル演算部(10)と、所定の正規化情報に基づいてスペクトルのデータに対して正規化処理を施し、正規化処理で得られる正規化データに対して回帰演算を実行して回帰パラメータを抽出するパラメータ化処理部(20)と、回帰パラメータを構成する各成分で表す空間について予め分割した複数の部分領域にて、当該正規化パラメータがいずれの部分領域に所属するかを判定し、入力される画像を分類する分類処理部(30)とを備える。
(もっと読む)
情報処理装置および方法ならびにプログラム
【課題】精度良く効率的に入力データのモダリティを検出する。
【解決手段】 入力データを複数の各変換行列U1・(Σ12U2T)を用いて複数の射影データP10を生成し、生成した複数の射影データP10に対し変換行列の逆射影を行うことにより逆射影データP20を生成し、入力データP1と逆射影データP20との相関を変換行列U1・(Σ12U2T)毎に算出し、算出した相関が最も高い変換行列U1・(Σ12U2T)が示すモダリティを入力データのモダリティとして識別する。
(もっと読む)
係数学習装置および方法、画像処理装置および方法、プログラム、並びに記録媒体
【課題】画質を向上させるとともに、簡単な構成で多様な変換パターンに対応できる画質変換処理を実現することができるようにする。
【解決手段】回帰予測演算および判別予測演算において、入力画像の注目画素に対応する複数の画素の値またはそれらの値から得られる特徴量をパラメータとして与える。本発明では、入力画像の注目画素に対応する複数の画素の値と、それらの値から得られる3つの特徴量である4つの抽出値を用いる。4つの抽出値はそれぞれ、動き方向に従って抽出した画素値、抽出した画素値の最大値および最小値、抽出した画素値の動き方向に従った微分特徴量の絶対値、並びに抽出した画素値の動き方向に従った微分特徴量の絶対値の最大値とされる。
(もっと読む)
移動物体検出装置及び方法、並びにプログラム
【課題】誤検出を低減し、充分な検出精度を得られることができるようにする。
【解決手段】 画像入力処理部11は、解析画像のデータを入力し、解析画像内で指定領域を設定する処理を実行する。ヒストグラム相関判定処理部14、伸縮ヒストグラム相関判定処理部15、及び正規化相互相関判定処理部16には、設定された指定領域を移動する移動物体の像の有無を判定する判定手法として相異なるものをそれぞれ適用し、適用した判定手法に従って移動物体の像の有無を判定する。結果統合部17は、これらの判定結果のうち任意の数の任意の種類を統合することによって、移動物体の像を検出する。本発明は、監視カメラに適用することができる。
(もっと読む)
61 - 80 / 771
[ Back to top ]