
Fターム[5L096FA34]の内容
Fターム[5L096FA34]に分類される特許
21 - 40 / 771
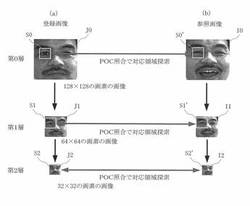
照合装置
【課題】高精度と高速処理を両立させる。
【解決手段】参照画像と登録画像とを照合する際、参照画像について、その原画像を最も解像度の高い高解像度画像(階層画像I0)とし、その下層に第1の低解像度画像(階層画像I1)、さらにその下層に第2の低解像度画像(階層画像I2)を作成する。登録画像を1つずつ読み出し、登録画像の階層画像J0,J1,J2に特徴領域S0,S1,S2を設定し、低解像度画像から高解像度画像へ向けての階層探索によって、参照画像における対応領域S2’,S1’,S0’を探索する。この際、任意の低解像度の階層画像、例えば登録画像の階層画像J2の特徴領域S2と参照画像の階層画像I2の対応領域S2’との類似度に基づいて、読み出した登録画像を参照画像と照合する登録画像候補として選択するか否かを判断し、参照画像と照合する登録画像を絞り込む。
(もっと読む)
画像の照明検出

【課題】画像における照明を分割するための方法を提供する。
【解決手段】好ましくは2個又は3個であるm個の光源を有する画像は、例えばフィルタ処理済の画像とフィルタ未処理の画像とである相異なるフィルタリングを有するペアをなす画像を取得し、事前に計算されたm個のマッピングからなる集合をピクセルレベル又は領域レベルで画像ペアに適用し、最適なものを選択することによって、それぞれがm個の光源の1つのみによって照らされる相異なる領域に分割される。画像の情報のレンダリングはそれに従って調整されてもよい。
(もっと読む)
画像処理装置及びその制御方法
【課題】 レンズの周辺光量落ちの影響が被写体の追尾結果に与える影響を低減し、精度のよい被写体追尾を実現する画像処理装置及びその制御方法を提供する。
【解決手段】 基準画像と、比較先画像における探索領域を構成する複数の部分画像との相関度に基づいて、比較先画像での被写体領域を探索して被写体追尾を行う。基準画像と部分画像との相関度を算出する前に、基準画像と部分画像における、画素の最大輝度値が予め定められた同一の輝度値となるように、各画素の輝度値を補正する。
(もっと読む)
パターン認識装置、パターン認識方法及びプログラム
【課題】より信頼度の高いパターンの認識結果を得ることができるようにする。
【解決手段】入力データから複数の部分データを抽出し、前記抽出した複数の部分データそれぞれに対して、予め登録されている登録データの対応する部分データとの間で類似度を算出し、前記算出された複数の類似度を、学習されたパラメータを用いて、それぞれ複数の変換後類似度に変換する。このとき、入力データが登録データと同一のカテゴリに属するデータである場合に算出される類似度と、入力データが登録データと異なるカテゴリに属するデータである場合に算出される類似度とを差別化させるように学習されたパラメータを用いて変換する。
(もっと読む)
画像識別子抽出装置
【課題】画像の局所領域間の相関が大きい画像や特定の周波数に信号が集中している画像から抽出される画像識別子は異なる画像を識別できる度合いである識別能力が低下すること。
【解決手段】画像を識別する情報である画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から領域特徴量を当該次元毎に算出する算出手段と、次元毎に算出される上記領域特徴量の差分値が所定値より小さいことを示す値を含む複数の値のうちの一つに当該差分値を、上記画像識別子の各次元の値として量子化する量子化手段とを備え、ある次元に関連付けられる2つの部分領域のパターンは、他の少なくとも1つの次元に関連付けられる2つの部分領域のパターンと相違する。
(もっと読む)
画像追尾装置
【課題】テンプレート内の追尾対象が小さい場合であっても、背景の誤検出に伴うテンプレートの更新精度を維持する。
【解決手段】画像追尾装置は、被写界画像を生成する撮像手段と、追尾対象の特徴を示す基準情報を生成する生成手段と、被写界画像内の画像情報が類似する類似領域を抽出する抽出手段と、基準情報に基づいて新たな被写界画像から第1追尾対象候補の位置を検出する第1検出手段と、類似領域に基づいて新たな被写界画像から第2追尾対象候補の位置を検出する第2検出手段と、第1および第2追尾対象候補の位置に基づいて、第1および第2追尾対象候補が同一の追尾対象か否かを判定する判定手段と、判定結果に基づいて、第1および第2追尾対象候補の位置の一方を追尾対象の位置として選択する選択手段と、第1および第2追尾対象候補が異なる場合には、第2追尾対象候補の位置を基準として新たな基準情報を生成する更新手段とを有する。
(もっと読む)
移動量測定装置および方法
【課題】累積的な移動量および1回測定当たりの移動量の測定精度が共に良好な移動量測定装置。
【解決手段】画像を入力する手段と、入力画像を記憶する手段と、記憶された画像の一部をテンプレート画像として抜き出す手段と、入力画像とテンプレート画像との相関計算によりパターンマッチングをする手段と、パターンマッチングの結果を用いて被測定物の移動量を算出する手段と、を備え、移動量を算出する手段は、固定されたテンプレート画像を用いたパターンマッチングにより計算された移動量と、逐次更新されたテンプレート画像を用いたパターンマッチングにより計算された移動量とを比較し、移動量の差が一定値未満の場合は固定されたテンプレート画像に基づく移動量を選択し、移動量の差が一定値以上の場合は両方の移動量を用いて補正計算することによって、被測定物の移動量を算出する移動量測定装置。
(もっと読む)
類似映像出力方法、類似映像出力装置および類似映像出力プログラム
【課題】印象が類似する映像データを出力する。
【解決手段】類似映像出力装置1は、複数の映像データが記憶された映像データ記憶部12と、複数の映像データのそれぞれについて、当該映像データを分割した区間毎の構造的特徴の出現する時間を構造的特徴量として算出し、構造的特徴量に基づいて、映像データ間の構造的特徴類似度を算出して、構造的特徴類似度データを出力する構造的特徴類似度算出手段22と、構造的特徴類似度データに基づいて、映像データ記憶部12から、基準映像データに類似する映像データを抽出する類似映像決定手段24と、を備える。
(もっと読む)
移動量測定装置および移動量測定方法
【課題】移動と停止を繰り返すような動きをする移動体の移動量を測定する場合であっても、高精度に測定する。
【解決手段】測定物の画像を入力する手段と、測定物のテンプレートを取得する手段と、前記取得されたテンプレートを保存する手段と、前記測定物の画像と前記保存されたテンプレートから前記測定物の移動量を算出する手段と、測定物が停止しているかを判定する手段と、を備え、前記保存されたテンプレートは、前記測定物が停止しているかを判定する手段により停止していると判定された場合に保存されたテンプレートを更新することを特徴とする。
(もっと読む)
追尾装置
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
(もっと読む)
階層型構成要素ベースの物体認識
【課題】相互に相手を基準に移動可能な任意数の部分からなる可能性のある、イメージ中の物体を認識するための方法を提供する。
【解決手段】オフライン段階では、本発明は一連の例示イメージから単一の物体の部分の相対的な動きを自動的に学習し、単一の物体の部分の記述、部分間の関係、および効率的な検索戦略を組み込んだ、階層型モデルを構築する。これは、例示イメージ中の単一の物体の部分のポーズ変化を解析することによって実行される。ポーズは、物体認識に関する任意の類似性尺度によって取得できる。オンライン段階では、本発明は、階層型モデルを使用して検索イメージ中の物体全体を効率的に見つける。オンライン段階中には、物体の有効なインスタンスのみが見つけられ、すなわち、物体の部分は全体イメージ中ではなく、効率的な検索を容易にしてその後の妥当性検査ステップを不要にする階層型モデル内の物体部分間の関係によって定義される、パラメータスペースの制限された部分でのみ検索される。
(もっと読む)
動き検出装置、動き検出方法及び動き検出プログラム
【課題】より少ない演算量でより正確にマッチングの信頼性を評価することができる動き検出装置を提供する。
【解決手段】動き検出装置は、差分算出部111、信頼度算出部112及び動き判定部113を備える。差分算出部111は、基準画像の注目ブロックと、注目ブロックと同一の大きさとなる比較画像における領域の集合との画素値の差分をそれぞれ算出する。信頼度算出部112は、比較画像において最も差分の小さいブロックを対象ブロックとし、該対象ブロックと注目ブロックとの差分である第1差分、及び、該対象ブロックの周囲に存在するブロックである周囲ブロックと注目ブロックとの差分である第2差分を用いて、注目ブロックにおけるマッチングの信頼度を算出する。動き判定部113は、信頼度に基づいて注目ブロックの動きを判定する。
(もっと読む)
異常パターンの発見
【課題】 異常パターン発見のための方法、システム及び製造物品を提供する。
【解決手段】 複数の異なるグリッドに分割されたビデオ・データ画像フィールドにおいてオブジェクトの移動の軌跡が追跡される。ビデオ・データから軌跡に関する大域的画像特徴を抽出し、これを学習軌跡モデルと比較して、学習軌跡モデルへの適合性の関数として大域的異常検出信頼度判定値を生成する。また、オブジェクト軌跡を含む画像フィールド・グリッドの各々についての局所的画像特徴を抽出し、これをグリッドについての学習特徴モデルと比較して、グリッドの学習特徴モデルへの適合性の関数として各々のグリッドについての局所的異常検出信頼度判定値を生成する。大域的異常検出信頼度判定値をグリッドについての局所的異常検出信頼度判定値に融合させて、追跡されるオブジェクトに関する融合異常判定とする。
(もっと読む)
画像識別子抽出装置
【課題】画像識別子を照合する画像識別子照合装置を提供すること。
【解決手段】画像を識別する情報である画像識別子を照合する照合部を備える。上記画像識別子は、当該画像識別子を構成する各次元に関連付けられる、画像中の、2つの部分領域から領域特徴量が当該次元毎に算出され、次元毎に算出された前記領域特徴量の差分値の絶対値に基づいて、当該差分値が前記画像識別子の各次元の値として量子化されている情報であり、かつ、当該差分値が所定の値より小さい場合には特定の値に量子化されている。照合部は、照合する2つの画像識別子を構成するある次元のそれぞれの値がいずれも上記特定の値の場合に、各次元の値の少なくとも一方が上記特定の値でない場合とは異なる処理を用いて当該2つの画像識別子を照合する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 印刷に現れる特徴に基づいて個々の物品を識別することが可能な個体識別装置、個体識別方法、及びプログラムを提供する。
【解決手段】 個体識別装置1は、基準物品2の印刷部から読み取った画像(基準画像データ21)及び識別対象とする物品3の印刷部から読み取った画像(対象物画像データ31)を色分解し、各色の色分布データ2R,2G,2B(3R,3G,3B)から色毎の相関値を求める。対象物画像データの読取範囲Bは基準画像データの読取範囲Aより広い範囲とし、読み取った範囲Bから基準画像データと同一形状及び同一面積の領域33を切出し、切出し位置を順次移動させながら各切出し領域について各色の色分布データの相関値を求める。そして、相関値が最大となる切出し位置のばらつきが各色で所定許容範囲内に収まるか否かを判定し、収まる場合は同一個体と判定する。
(もっと読む)
行動認識装置、行動認識方法及びプログラム
【課題】実験動物の各部位の行動をより詳細に定量化する。
【解決手段】輪郭情報取得部10は、撮像部で撮像されるマウスの撮像画像に基づいて、その撮像画像におけるマウスの重心位置を基準として極座標変換されたマウスの輪郭情報を逐次取得する。変動情報算出部11は、輪郭情報取得部10により逐次取得されたマウスの輪郭情報を、例えば、頭部、尾部、右胴体部、左胴体部等の部位単位で分割し、分割された部位毎にマウスの輪郭情報の変動に関する情報を算出する。行動判別部12は、変動情報算出部11によって算出された各部位の輪郭情報の変動に関する情報に基づいて、マウスの行動を判別する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】画像内の物体を安定して追尾すること。
【解決手段】画像処理装置100は、追尾対象となる物体の複数の部分テンプレートと、テンプレート画像とを比較して、領域毎の相関値を算出する。画像処理装置100は、相関値に基づいて、部分テンプレートに類似する画像領域を仮説領域として抽出する。画像処理装置100は、複数の仮説領域を重複しないように組み合わせた全体仮説を生成し、相関値や誤差を基にして、全体仮説の評価値を算出する。画像処理装置100は、評価値を基にして、複数の全体仮説から最適な全体仮説を判定する。
(もっと読む)
画像照合装置または画像照合方法
【課題】 二つの画像がSAR画像と光学画像とで異種である場合に、特徴点やエッジが明確に検出できない場合であっても画像の照合をおこなうことを目的とする。
【解決手段】 本発明によれば、異種画像と光学画像について各々フーリエ変換を行う周波数成分検出手段105a、105bと、異種画像と光学画像の各々の区間の画素列を周波数変換後の周波数成分を照合することによって異種画像と光学画像との位置あわせをおこなう位相照合手段106を備えた。
(もっと読む)
ロボット装置、位置姿勢検出装置、位置姿勢検出プログラム、および位置姿勢検出方法
【課題】平面画像により表現された対象物体の、立体空間における位置および姿勢を高精度に検出する。
【解決手段】対象物体を撮像して画像データを生成する撮像装置11と、撮像装置11を可動に支持するロボット本体12と、リファレンスに対する撮像装置11からの視線方向ごとに、視線方向に対する面のテンプレート画像データとロボット座標系における面の位置および姿勢を表す情報とロボット座標系における撮像装置11の位置および姿勢を表す情報とを有するテンプレート情報を記憶するテンプレート情報記憶部と、撮像装置11が生成した画像データに含まれる対象物体の画像から可視である面を検出し、テンプレート情報記憶部から、可視である面に対応するテンプレート情報を読み込み、テンプレート情報に基づいてロボット座標系における対象物体の位置および姿勢を表す位置姿勢データを生成する位置姿勢データ生成部とを備えた。
(もっと読む)
パターン認識装置、パターン認識方法
【課題】相互部分空間法を用いた競合学習により、パターン認識性能を向上できるパターン認識装置、パターン認識方法を提供する。
【解決手段】パターン認識装置は、辞書記憶部、認識部、辞書更新部を備える。前記辞書記憶部には認識対象の本来のパターンのカテゴリと各カテゴリ毎に特徴ベクトル空間の部分空間とを対応付けて記憶したパターン認識用の辞書が記憶されている。前記認識部は前記入力パターンの部分空間と前記辞書内の部分空間とのなす正準角から前記入力パターンのカテゴリを特定する。前記辞書更新部はパターン認識時に互いのカテゴリが一致したか否かに応じて類似度を増減させ、前記入力部分空間のベクトルのうち、前記辞書内の部分空間と正準角をなすベクトルに、前記辞書内の部分空間を近づけまたは遠ざけるように新たな部分空間を計算し、求めた部分空間で前記辞書内の部分空間を更新する。
(もっと読む)
21 - 40 / 771
[ Back to top ]