
Fターム[5L096FA67]の内容
Fターム[5L096FA67]に分類される特許
201 - 220 / 1,697
位置姿勢計測装置及び位置姿勢計測方法
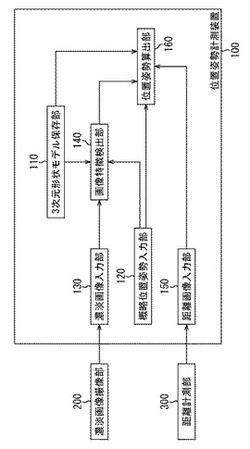
【課題】画像と3次元形状モデルの誤対応を減らし、高速でロバストな物体の位置及び姿勢の計測を実現する。
【解決手段】物体の3次元形状モデルを保存する保存部110と、物体の濃淡画像を入力する濃淡画像入力部130と、物体の距離画像を入力する距離画像入力部150と、位置姿勢計測装置100に対する物体の概略の位置及び姿勢を入力する概略位置姿勢入力部120と、濃淡画像の情報を利用して、物体の概略の位置及び姿勢をもとに物体の第1の位置及び姿勢を算出するとともに、第1の位置及び姿勢を用いて算出される3次元形状モデルの画像面上での投影位置をもとに、距離画像から得られる3次元点群または当該3次元点群及び濃淡画像の画像特徴群と、3次元形状モデルとの対応付けを行い、当該対応付け結果に基づいて第2の位置及び姿勢を算出する位置姿勢算出部160を備える。
(もっと読む)
異常検知装置

【課題】拘束シーンのように複数人が密着して生じる異常を検知するのは困難だった。
【解決手段】互いに姿勢が異なる人物の形状を模した複数の姿勢別人物モデル211と、背景画像210とが予め記憶部21に記憶されている。撮像部20は監視空間を撮像して監視画像を出力し、変化領域抽出部220は背景画像210との比較により監視画像から変化領域を抽出し、姿勢判定部222は姿勢別人物モデル211のうち2以上を重ね合わせた複合形状を変化領域と形状比較して適合度を算出し、適合度が所定基準を超える姿勢の組み合わせを判定する。異常判定部223は姿勢判定部222により判定された姿勢の組み合わせが予め設定された異常な組み合わせと合致するときに異常信号を出力する。
(もっと読む)
デジタルイメージ安定化装置及び方法
【課題】デジタルイメージ安定化装置及び方法を提供する。
【解決手段】デジタルイメージ安定化(DIS)方法は、最適の特徴点を選択するための特徴点分類アルゴリズム、選択された特徴点のモーションベクトルを得るための計算的に効率的なタイルベクトル基盤の階層的ブロックマッチング検索アルゴリズム、ベクトルサイズ比率及びアングル差に基づいて選択された特徴点をグループ化するための特徴点モーションベクトルグループ化/比較処理を含む。
(もっと読む)
回転検出システム及び三次元ブラウジング装置
【課題】 撮影面に垂直な面内での被写体の回転を検出できる回転検出システムを提供することである。
【解決手段】 イメージセンサ25は、その撮影面43に垂直な面内で回転するリフレクタ2を撮影する。リフレクタ2は、再帰反射シート5R及び5Lを含む。MCU23は、撮影された2つの再帰反射シート5R及び5Lの像の面積同士を比較して、その比較結果に基づいて、撮影面43に垂直な面内でのリフレクタ2の回転方向及び回転量を算出する。コンピュータ33は、MCU23が算出したリフレクタ2の回転方向及び回転量に基づいて、仮想三次元空間を描画するための仮想カメラ55の姿勢を設定する。
(もっと読む)
画像処理装置、電子カメラ、及び画像処理プログラム
【課題】動画像における時系列的な変化態様に応じた動画効果を演出することが可能な画像処理装置、電子カメラ、及び画像処理プログラムを提供する。
【解決手段】第1の動画像に対して第2の動画像を重畳して表示可能に構成された画像処理装置において、前記第1の動画像における時系列的な変化態様を解析した解析情報を取得する取得手段と、前記取得手段によって取得された前記解析情報に応じて表示態様を変化させる動画像を前記第2の動画像として生成する動画像生成手段とを備える。
(もっと読む)
画像処理装置およびプログラム
【課題】被写体および被写体外を含む視差マップを、処理量を抑えつつ得ることができる画像処理装置を提供すること。
【解決手段】少なくとも2つの視点の画像から視差マップを生成する画像処理装置であって、2つの視点の画像のうち、基準とする画像について、被写体の領域を検出する被写体領域検出部と、被写体の領域についてステレオマッチングを行い、該領域の視差マップを生成する被写体領域マッチング処理部と、被写体の領域外についてステレオマッチングを行い、該領域の視差マップを生成する被写体外領域マッチング処理部と、2つの視差マップを合成する合成処理部とを備える。
(もっと読む)
物体の姿勢を求める方法及びシステム
【課題】ネジ及びボルトのような、鏡面反射性で、実質的に円筒形でネジ山を有する物体の姿勢を求める。
【解決手段】物体の姿勢が、物体の画像の組をカメラにより取得することによって求められ、この物体は、この物体の局所領域が実質的に球状に見えるように表面上に配置されたネジ山を有し、カメラは、各組に関して異なる視点にあり、各組における各画像は、シーンが異なる方向から照明されている間に取得される。各画像から特徴の組が抽出され、特徴は、カメラに向かう法線を有する表面上の点に対応する。パラメトリック直線が、各画像に関して点に当てはめられ、この直線は、カメラの中心と、物体の軸とを結合する平面上にある。次に、幾何学的制約が直線に適用され、物体の姿勢が求められる。
(もっと読む)
画像処理装置
【課題】輝度の勾配の方向の回転角を含む回転角範囲を特定するための処理に要する時間を短くすることが可能な画像処理装置を提供すること。
【解決手段】装置100は、輝度の勾配の方向の回転角を含む象限を特定する特定部101と、基本象限に含まれる回転角範囲の中から入力値を含む正接の範囲に対応する回転角範囲を特定し、特定された回転角範囲を識別する出力値を出力する特定処理を実行する実行部102と、特定された象限が基本象限である場合、基本入力値を入力値として入力して特定処理を実行させ、出力値を、勾配の方向の回転角を含む回転角範囲を識別する識別値として取得する第1の取得部103と、特定された象限が基本象限以外の補助象限である場合、基本入力値を変換した値を入力値として入力して特定処理を実行させ、出力値を変換し、変換された出力値を識別値として取得する第2の取得部104と、を備える。
(もっと読む)
侵入物体の検知を行うことができる物体追尾装置、物体追尾方法及び記憶媒体
【課題】追尾対象体が追尾されている画像データの画像フレームに侵入物体が侵入したことを検出することのできる物体追尾装置を提供する。
【解決手段】追尾対象である被写体を追尾対象体として追尾する物体追尾装置は、動画像データにおける現フレームよりも前の前フレームにおいて追尾対象体の位置を示す前フレーム対象領域又は前記現フレームにおいて追尾対象体の位置を示す現フレーム対象領域に、複数のサブ領域を設定し、当該サブ領域毎にその特徴量を求める特徴量算出部104と、特徴量が第1の閾値を超えるサブ領域が存在し、かつその数が基準値に達していなければ、現フレームにおける追尾対象体が位置する領域に、追尾対象体と異なる侵入物体が侵入したと判定する侵入物判定部105とを有し、侵入物判定部105は追尾対象体の像領域に侵入物体が侵入したか否かを判定する。
(もっと読む)
部位認識装置、部位認識方法、及び部位認識プログラム
【課題】映像や画像に含まれる人物の部位等を高精度に認識する。
【解決手段】映像又は画像に含まれる人物の部位を認識する部位認識装置において、前記映像又は画像に含まれる少なくとも1人の人物の人体領域を検出する人体領域検出手段と、前記人体領域検出手段により得られる人体領域から所定の部位を認識する部位認識手段とを有し、前記部位認識手段は、前記人体領域検出手段により得られる人体領域の画像のうち、予め設定された形状と一致する領域を、前記形状に対応して設定された前記所定の部位として認識することにより、上記課題を解決する。
(もっと読む)
情報処理装置、情報処理方法及びプログラム
【課題】物体の位置及び姿勢の真値と初期値として入力される位置及び姿勢の概略値とのずれに関わらず、ロバストに物体の位置及び姿勢を算出する。
【解決手段】検出部120は、基準位置姿勢において視点から観測される三次元形状モデル上の幾何特徴を基準幾何特徴として検出する。類似度算出部140は、参照位置姿勢において視点から観測される三次元形状モデル上の基準幾何特徴に対応する幾何特徴である参照幾何特徴を探索し、基準幾何特徴と参照幾何特徴との類似度を算出する。評価値算出部150は、類似度に基づいて、基準幾何特徴と参照幾何特徴との対応付けに係る評価値を算出する。
(もっと読む)
識別装置
【課題】目標の識別精度を高くする。
【解決手段】実施形態の識別装置は、選択部、学習部、入力受付部、特徴抽出部、特徴量計算部、類似度計算部、識別部、及び出力制御部、を備える。選択部は、各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルから学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う。学習部は、選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、複数の識別基準を含む評価基準を生成する。入力受付部は、目標からのレーダエコーに基づく画像の入力を受け付ける。特徴抽出部は、画像から目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する。特徴量計算部は、評価基準を用いて特徴ベクトルの特徴量を計算する。類似度計算部は、特徴量と識別特徴量の類似度を計算する。識別部は、類似度を用いて目標を識別する。出力制御部は、識別結果を出力部に出力させる。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】非接触で、かつ、容易に手の回転動作により入力情報を入力できるようにする。
【解決手段】指先位置計算部63は、画像内に含まれる手の指先の座標位置を取得する。回転方向特定部145、および回転速度計算部146は、それぞれ画像を所定の指先の回転動作の中心として設定される中心位置を基準として、設定される回転角度に応じて、画像を放射状に複数のエリアに区分するとき、取得された指先座標が属するエリアが隣接するエリアに移動するとき、回転動作の回転方向、および回転速度を計測し、回転動作による遊技者の入力情報として出力する。重心計算部163は、回転動作が1周する場合、順次取得される座標位置の重心位置を計算する。軸補正部164は、重心位置に、中心位置を移動させるように、画像が区分されたエリアを移動させてエリアを補正する補正量を計する。本発明は、遊技台の入力装置に適用することができる。
(もっと読む)
映像処理装置、映像処理方法およびプログラム
【課題】 本発明は、映像から特定の物体を効率的に検出することを目的とする。
【解決手段】 本発明は、映像から物体を検知する検知部と、前記検知部が検知した物体が移動する移動方向を判定する判定部と、前記検知部が複数の物体を検知した場合、前記判定部が判定した前記複数の物体の移動方向に応じた順序で前記複数の物体が特定の物体であるかの検出を行う検出部とを有する。
(もっと読む)
弧検出装置、弧検出プログラム及び携帯端末装置
【課題】弧検出にかかる処理負荷を軽減しつつ、適切に弧を検出すること。
【解決手段】画像を入力する入力部と、画像から複数の線分を検出する線分検出部と、複数の線分のうち、2つの線分のそれぞれの位置及び基準に対する角度に基づき、2つの線分が関連付けられるかを判定する判定部と、判定部の判定結果に応じて関連付けられた2つの線分に基づき、前記複数の線分のうち、該2つの線分を含む線分で近似される弧を検出する弧検出部と、を備える。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
物体認識装置、物体認識方法、学習装置、学習方法、プログラム、および情報処理システム
【課題】対象物体の姿勢に対応した信頼度の高い領域組からの投票を重視することで、対象物体を精度よく認識する。
【解決手段】対象物体を検出する検出器の学習方法は、対象物体の既知の三次元モデルから複数の特定領域を選択する選択工程と、選択工程で選択された特定領域を検出する検出器の学習を行う学習工程と、学習工程で学習された検出器により複数の特定領域のうち所定の領域の位置および姿勢の認識処理を行う評価工程と、評価工程における認識処理の結果の認識精度に従って、検出器の出力に対する投票重みを設定する正規化工程とを有する。
(もっと読む)
映像処理装置、映像処理方法及びプログラム
【課題】 本発明は映像中から所望の物体を効率的に検出することを目的とする。
【解決手段】 映像から物体を検知する検知部と、検知した物体が移動する移動方向を判定する判定部と、検知した物体が特定の物体であるかの検出を行うための検出処理を前記判定部が判定した前記物体の移動方向に応じて切り替える検出部とを有する。
(もっと読む)
姿勢検出装置
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
姿勢推定装置および姿勢推定方法
【課題】単眼カメラを用いた場合においても、あらゆる動作に対して姿勢推定を行うこと。
【解決手段】座標変換部103は、複数の部位座標点の画像データにおける座標を、予め保持されたカメラに関する幾何学的パラメータ情報に基づいて、人物に固有の3次元座標系である人物ローカル座標系における3次元部位座標へ変換する。姿勢推定部105は、複数の部位領域のうち第1の部位領域において、第1の部位領域に含まれる複数の部位座標点のうち尤度値が最大となる部位座標点の3次元部位座標と、尤度値が最大となる部位座標点以外の部位座標点の3次元部位座標を含む所定の平面領域上の所定の座標とを通る直線を第1の骨直線と推定し、第1の骨直線と、第1の部位領域と隣接する第2の部位領域において推定された第2の骨直線との交点を、人物の関節位置と推定する。
(もっと読む)
201 - 220 / 1,697
[ Back to top ]