
Fターム[5L096FA67]の内容
Fターム[5L096FA67]に分類される特許
121 - 140 / 1,697
信号処理装置
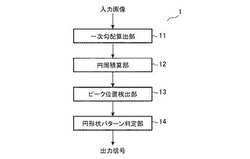
【課題】画像内に同心円形状パターンが存在するか否かの判定を高精度に行うことができる信号処理装置を提供する。
【解決手段】入力画像の勾配成分を算出した結果を、着目画素を中心として円周方向に積算した後、積算された勾配成分からピーク位置を検出することで、入力画像に同心円形状パターンが存在していると判定する。このように入力画像の勾配成分を円周方向に積算するため、雑音が多い画像内での同心円形状パターンや、先鋭度の低い同心円形状パターンであっても、画像内の円形状を高精度に検出することができる。
(もっと読む)
物体認識方法及び認識装置

【課題】魚眼画像に対し、射影変換や補正演算による画像の変換を行わず、魚眼画像の歪んだ画像をそのまま用いて物体の認識を行うことができるようにする。
【解決手段】物体の認識を行う対象魚眼画像110の歪みの方向にあわせて領域を分割し120、物体認識部130がそれぞれの領域毎に用意したデータベース140を用いて物体認識を行う。また、対象魚眼画像100に回転処理を施した複数の対象魚眼画像に対しても同様の処理を行い、検出座標変換部150が得られた物体位置を逆回転により元の位置に戻し、得られた結果を検出結果として出力する。これにより、物体認識の検出精度の向上、データベースのデータ量の削減が可能となる。また、魚眼画像に対する物体認識のためのデータベース作成には、データベース作成に必要となる物体画像を回転させたものを利用する。
(もっと読む)
部品回転角度検出装置及び画像処理用部品データ作成装置並びに部品回転角度検出方法及び画像処理用部品データ作成方法
【課題】リード以外のコイル等の金属部分が露出する部品でも、リードのみを画像認識して部品の回転角度を精度良く検出できるようにする。
【解決手段】カメラで撮像したリード付き部品の画像の中からリード識別データとの類似度が所定値以上の部分をリードとして識別し、識別したリードの位置に基づいて当該部品の回転角度を算出する。ここで、リード識別データは、予めリードの先端画像をリードの方向(0°、90°、180°、270°)毎に学習して作成され、記憶装置に記憶されている。リード識別データとして、Haar−like特徴量、HOG特徴量、SIFT特徴量のいずれかが用いられる。検出した回転角度に応じて画像内における部品の回転角度を補正し、当該部品の特徴を抽出して画像処理用部品データ(ボディ、リード、バンプ等の位置やサイズ等のデータ)を作成する。
(もっと読む)
画質評価
【課題】画像の画質を予測するコンピュータで実行するシステム及び方法を開示する。
【解決手段】入力画像に関して、この方法は、画像に関する意味内容情報に基づいて第一の記述子を生成する工程と、画像から抽出される美的特徴に基づいて第二の記述子を生成する工程とを含む。第一の記述子及び第二の記述子に基づいて訓練されて品質値を画像割り当てるカテゴライザを用いて第一の記述子及び第二の記述子に基づいて品質値を画像に割り当て、出力する。
(もっと読む)
画像領域追跡装置、画像領域追跡方法、および、コンピュータ・プログラム
【課題】画像特徴の類似する追跡対象領域と非追跡対象領域とが近接する画像を含む動画像において、追跡対象領域の追跡をより精度よく行う画像領域追跡装置を提供すること。
【解決手段】時系列的に連続する入力画像が入力される画像入力部101と、任意の入力画像において追跡対象モデルを取得する追跡対象モデル取得部102と、各入力画像において、該入力画像および他の入力画像間のフローベクトルに基づいて、該他の入力画像における追跡対象領域からの移動ベクトルを推定することにより該入力画像における追跡対象領域の概略位置を表す第1追跡位置を求める第1追跡部103と、各入力画像において追跡対象モデルの画像特徴に基づく追跡処理を用いて第1追跡位置を補正することにより第2追跡位置を求めるとともに、該入力画像における統合的な追跡位置である統合追跡位置を第2追跡位置に基づいて決定する第2追跡部104と、を備える。
(もっと読む)
奥行き画像内の物体を検出する方法およびシステム
【課題】画像内の物体を検出するスキャンウィンドウ手法であって、計算効率が良い方法で、奥行き画像内の物体を検出する方法を提供する。
【解決手段】奥行き画像内の物体を検出する方法が、奥行き画像内の領域を覆う検出ウィンドウを決定することを含み、該検出ウィンドウのロケーションは、奥行き画像内の候補ピクセルのロケーションに基づき、検出ウィンドウのサイズは、候補ピクセルの奥行き値および物体のサイズに基づいている。検出ウィンドウ内の前景領域が、候補ピクセルの奥行き値および物体のサイズに基づいてセグメント化される。特徴ベクトルが、前景領域内のピクセルの奥行き値に基づいて求められ、特徴ベクトルが分類されて、物体が検出される。
(もっと読む)
走行支援装置
【課題】特殊な照明装置を追加するといったコストアップを招くことなく、周期環境が暗い状況であっても障害物の検出精度の向上を図る。
【解決手段】光源検出部12は、光源対象領域Rdにおいて後続車両のヘッドライト(光源)に相当する面積を光源面積として算出する。そして、閾値算出部14は、算出した光源面積に応じて、後続車両検出部15において利用される差分法の閾値を設定する。この場合、後続車両検出部15は、撮像画像Ipにおいて検出領域R1,R2を設定し、評価パラメータである差分法の閾値に基づいて撮像画像を評価することにより、検出領域R1,R2内における障害物(併走車両)を検出する。
(もっと読む)
画像処理装置及びプログラム
【課題】撮像手段により撮像された被写体の画像を含むカラーの撮像画像のうちで被写体の画像に対応する領域である被写体領域を検出する場合における、被写体領域の検出精度を従来よりも向上させる。
【解決手段】エッジ検出部(18)は、撮像画像を複数の色成分に分解して生成される複数の色分解画像の各々について、各画素におけるエッジ勾配の勾配方向及びエッジ強度を算出し、算出したエッジ勾配の勾配方向及びエッジ強度に基づいて、各色分解画像についてエッジ画素を検出する。合成部(20)は、各画素について、当該画素におけるエッジ強度が最大である色分解画像の当該画素におけるエッジ強度及びエッジ勾配を特定する。被写体領域検出部22は、エッジ検出部(18)により検出されたエッジ画素と、合成部(20)により特定されたエッジ強度及びエッジ勾配の勾配方向に基づいて被写体領域を検出する。
(もっと読む)
カメラポーズ推定装置、カメラポーズ推定方法及びカメラポーズ推定プログラム
【課題】移動物体が含まれる場合においても正確にカメラポーズを算出する。
【解決手段】実空間中の点の3次元座標と、3次元座標が有するテクスチャ情報と、3次元座標が移動物体上か否かを示す移動物体フラグとを3次元点IDに関連付けた3次元リスト情報を記憶する手段と、移動物体フラグが0である3次元点の対応付けを行う3次元点対応付け手段と、最適カメラポーズ情報を出力するカメラポーズ算出手段と、最適カメラポーズ情報を用いてアウトライヤ対応点リスト情報内の3次元座標がフレーム画像に射影される再射影点を決定し、該再射影点とアウトライヤ対応点リスト情報内の対応点座標から算出する動きベクトルを用いて対象の3次元座標が移動物体上か否か判定し、移動物体と判定された場合は、処理対象のアウトライヤ対応点リスト情報内の3次元点IDに対応する移動物体フラグを1に更新して、最終的な最適カメラポーズを出力する。
(もっと読む)
運転支援装置
【課題】道路のスロープ特性と渋滞予兆とを考慮して燃費を向上させるための車両の運転支援装置の提供。
【解決手段】カメラから路面映像を受信する路面映像入力手段135と、路面映像を鳥瞰変換する鳥瞰変換手段136と、鳥瞰変換された路面映像から複数個の車線を抽出する車線抽出手段137と、抽出された複数個の車線の傾きを算出する傾斜度算出手段138と、複数個の車線の傾の差異値を利用して路面傾斜度を算出する路面傾斜度算出手段139と、自車両の加速度を検出する手段と、検出した加速度の周波数分析から周波数に対応するパワースペクトルを算出する手段と、算出したパワースペクトルの単回帰直線を演算し、所定周波数範囲での当該単回帰直線の傾きの変化量の極大値を傾き極大値として算出する手段133とを備える。運転支援装置は、路面傾斜度が所定値よりも大きく、かつ傾き極大値が自車両前方での渋滞予兆を示す場合に、運転支援をおこなう。
(もっと読む)
対象物検出装置及びプログラム
【課題】対象物が静止していても、精度良く対象物を検出することができるようにする。
【解決手段】ウインドウ画像抽出部20によって、撮像装置12によって撮像した撮像画像からウインドウ画像を抽出する。スコア算出部22によって、歩行者の向きの分類毎の識別モデルと、ウインドウ画像とに基づいて、向きの分類毎に、歩行者らしさを示すスコアを算出する。歩行者識別部26によって、算出された向きの分類毎のスコアの分布に基づいて、ウインドウ画像が歩行者画像か否かを識別する。
(もっと読む)
画像処理方法および監視装置
【課題】監視環境が時々刻々と変化するような場面でも、検出すべき物体の位置や速度と言った属性を正しく計測する。
【解決手段】撮像装置において撮像した入力画像を処理して、入力画像のエッジ情報を抽出し、エッジ情報に基づいてテンプレート画像を作成して記憶し、記憶されたテンプレート画像とその位置情報に基づいてテンプレートマッチング処理を実行し、マッチングに成功したテンプレートはその位置座標を更新し、マッチングに失敗したテンプレートは削除し、テンプレートマッチング処理の結果に基づいて検出すべき物体の位置や速度の少なくとも一つの属性を計測し、検出された物体の危険度を判定するようにする。
(もっと読む)
入力された発話の関連性を判定するための装置および方法
【課題】オーディオまたはビジュアルの向きを用いて入力された発話の関連性を判定する。
【解決手段】ある時間間隔における発話中のユーザの顔の存在を特定する。時間間隔の間のユーザの顔に関連づけられた顔の向きの特徴を取得する。ある場合には、入力された音に対する向きの特徴を判定する。顔の向きの特徴にもとづいて時間間隔の間のユーザの発話の関連性を特徴付ける。
(もっと読む)
物体認識装置および物体認識方法
【課題】識別対象が画像上で変形する場合であっても、その識別対象の認識率を向上させることができる、物体認識装置および物体認識方法を提供する。
【解決手段】物体認識装置1は、記憶部20内に、認識対象の情報を示す監視物体情報210と、カメラ装置のパラメータを示すカメラ情報220を記憶している。そして、物体認識装置1は、監視物体情報210を用いて、監視空間上に検知領域を作成し、その作成した検知領域を、カメラ情報220を用いて、監視画像上の変形検知領域に変換する。物体認識装置1は、変形検知領域の画像情報100について特徴量を抽出し、認識対象の物体か否かを判定する。
(もっと読む)
映像監視システム及び人数推定方法
【課題】撮像された画像内に存在する人物の人数を推定することが可能な映像監視システム及び人数推定方法を実現する。
【解決手段】撮像機器から取得した映像信号に基づく画像データから方向に関する特徴を算出するとともに、前記方向に関する特徴についてのヒストグラムを所定の大きさの時空間において算出した時空間ヒストグラムを作成し、前記時空間ヒストグラムから動きの複雑さを表す時空間評価値を算出するとともに、前記時空間評価値の時間変化を算出し、前記時空間評価値の時間変化から画像内または特定領域に存在する人数が2人以上の所定人数以上か否かを推定する。
(もっと読む)
特徴領域抽出装置、特徴領域抽出方法、及びプログラム
【課題】車両の検知に特有の誤検知を防止する。
【解決手段】領域抽出部102は、画像から二輪車の特徴部分に類似する領域と四輪車の特徴部分に類似する領域とを抽出する。組抽出部103は、領域抽出部102が抽出した領域の中から中心位置同士の距離が所定の閾値以下となる領域の組を抽出する。除外部105は、組抽出部103が抽出した組を構成する領域のそれぞれに異なる車両の特徴部分が含まれる可能性が低い場合に、当該組の構成する領域の一方を抽出結果から除外する。
(もっと読む)
ステレオカメラのキャリブレーション方法及び情報処理装置
【課題】ステレオカメラのキャリブレーション方法及び情報処理装置において、簡単、且つ、短時間の作業で安定した精度の補正パラメータを生成可能とすることを目的とする。
【解決手段】右及び左カメラのキャリブレーションを行う際、点灯状態の右及び左発光部を撮影可能な位置に配置された反射体に対し、点灯された右発光部を右カメラで撮影した画像の位置座標を点灯された左発光部を左カメラで撮影した画像の位置座標に平行移動させる補正パラメータを求め、点灯された右及び左発光部を右カメラで撮影した画像に基づいて右及び左発光部を結ぶ直線の回転角度を求め、右カメラの撮影画像を回転補正する補正パラメータを求め、点灯された右及び左発光部を左カメラで撮影した画像に基づいて右及び左発光部を結ぶ直線の回転角度を求め、左カメラの撮影画像を回転補正する補正パラメータを求めるように構成する。
(もっと読む)
物体検出装置
【課題】ユーザーによるモーション操作の検出精度を向上する。
【解決手段】所定のフレームレートで逐次撮影し、撮影画像を取得する撮影部と、前記撮影部で撮影する際の照明光を発光する照明部と、前記照明部が第1光強度と前記第1光強度よりも小さい第2光強度とを選択的に発光するように切換制御する制御部とを備える。
(もっと読む)
計測装置,計測方法および計測プログラム
【課題】 レーザレンジファインダで複数の対象を計測して多様な情報を得る。
【解決手段】 計測装置(10)は、スキャン面(Scn)が水平面に対して傾斜したLRF(14)で複数の対象(T1,T2,…)を計測する。計測装置のコンピュータ(12)は、ステップS1で複数の対象に関する3次元形状モデル(M1,M2)をデータベース(50)に登録し、その後、ステップS3でLRF14を制御してスキャン面の水平面に対する傾斜角(α)を変化させつつ、ステップS5〜S19(およびS21〜S39)で複数の対象それぞれのパーティクルフィルタ(38a,38b,…)を用いてLRF14からの計測データと3次元形状モデルとの比較を行うことにより複数の対象それぞれの3次元形状および姿勢、特に人の体の方向および頭の方向を少なくとも推定する。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
121 - 140 / 1,697
[ Back to top ]