
Fターム[5L096FA67]の内容
Fターム[5L096FA67]に分類される特許
41 - 60 / 1,697
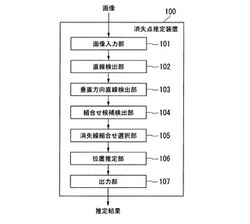
消失点推定方法、消失点推定装置及びコンピュータプログラム
【課題】消失点の推定精度を向上すること。
【解決手段】入力された画像に含まれる直線を検出し、直線の中から、略垂直の直線である垂直方向直線を検出し、画像に含まれる直線のうち垂直方向直線ではない直線である非垂直方向直線と、垂直方向直線との組合せのうち、その端点同士の距離が閾値よりも短い組合せを組合せ候補として検出し、組合せ候補の中から、垂直方向直線と非垂直方向直線とが類似している組合せ候補を消失線組合せとして選択し、選択された複数の消失線組合せにおける、複数の非垂直方向直線に基づいて消失点の位置を推定する。
(もっと読む)
画像検査装置、画像検査方法、及びプログラム

【課題】多種多様な定型帳票を対象に、帳票種識別を精度良く行う。
【解決手段】基準画像を入力する基準画像入力手段と、被検査画像を入力する被検査画像入力手段と、基準画像と被検査画像とを整合する画像整合手段と、整合された画像に対して座標変換処理を施すことにより複数のパラメータを算出する算出手段と、複数のパラメータの各値と、複数のパラメータのそれぞれに対応して予め定められた複数の基準値とをそれぞれ比較する比較手段と、比較手段の比較結果に基づいて、被検査画像の受け入れの可否を判断する判断手段と、を含む。
(もっと読む)
検索装置、検索方法、記録媒体、ならびに、プログラム
【課題】ユーザの意思に基づいて位置が定められるオブジェクトの位置から検索クエリに指定すべき指定長を得る検索装置等を提供する。
【解決手段】検索装置101において、検知部102は、現実空間内でユーザの意思に基づいて位置が変化する複数のオブジェクトのそれぞれの位置を検知する。算出部103は、検知された複数のオブジェクトの位置から、ユーザの意思に基づく指定長を算出する。検索部104は、少なくとも、商品サイズと、商品画像と、を有する商品レコードが管理される商品データベースから、算出された指定長に基づく検索条件を満たす商品サイズを有する商品レコードを検索する。表示部105は、検索された商品レコードが有する商品画像を画面に表示する。
(もっと読む)
対象物種別判定装置
【課題】対象物の種別判定に要する演算負荷の軽減及び種別判定時間の短縮を図ることができる対象物種別判定装置を提供する。
【解決手段】赤外線カメラ2Rにより撮像された撮像画像から対象物の対象物領域Rを抽出し、対象物領域R内の運動判断領域Pについての輝度プロファイルJnを作成する(STEP106)。現在よりΔT前に作成した輝度プロファイルJoをメモリから読出し、Jn,Joの特徴量の差異が所定値以上であるか否かを判定する。所定値以上の差異があれば、対象物は生体(例:歩行者)であると判定し(STEP110)、なければ、現在よりΔT/2前に作成した輝度プロファイルJhをメモリから読出し、Jn,Jhの特徴量の差異が所定値以上であるか否かを判定し、所定値以上の差異があれば、対象物は生体であると判定し、なければ、対象物は生体でないと判定する。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個体識別装置100は、基準物品に付与されたタガント分布層11を光学的に読み取り(S101)、基準物品の特徴点を抽出し(S102)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて基準特徴量データを算出し(S103)、基準特徴量データを記憶する(S104)。また、対象物品に付与されたタガント分布層11を光学的に読み取り(S105)、対象物品の特徴点を抽出し(S106)、抽出された特徴点からなる点群の重心を基準点とし、基準点に基づいて対象特徴量データを算出し(S107)、基準特徴量データと対象特徴量データとを照合し(S108)、一致するか否かを判断する(S109)。
(もっと読む)
画像検索装置、画像検索方法及びプログラム
【課題】ユーザにとって心的な負荷が軽減される検索結果を簡単な処理により得ることができるようにする。
【解決手段】検索に必要な局所特徴量の算出の過程で回転角度を算出するようにし、検索結果として画像を表示する際には、推定された回転角度に基づいて回転正規化の要否を判定し、回転角度が所定値以上である場合には、クエリ画像を基準にしてサンプル画像を回転正規化した後に表示するようにして、検索結果を確認する時に、心的回転による負荷を軽減するとともに、計算量を抑えて検索結果を得ることができるようにする。
(もっと読む)
立体画像表示装置
【課題】従来の方式では、最前面と最背面の視差の値の単純な差分や、その時間的な累積値のみで立体映像の安全性や快適性を判定しているため、現実的に快適に視聴できるにもかかわらず、快適でないという誤った評価結果が出力される場合があった。
【解決手段】本発明は、立体画像を構成する左眼用画像と右眼用画像とを取得し、立体画像の視差角分布を取得し、当該視差角分布に基づいて立体画像の見やすさを評価する構成を有するものである。当該構成を有することによって、立体画像の安全性や快適性に関してより適切な評価結果を出力することが可能になる。
(もっと読む)
入力体の動き検出方法およびそれを用いた入力デバイス
【課題】1台の光学的撮像手段を用いた画像解析から、人の手先の三次元的な動きを検出することのできる入力体の動き検出方法と、この動き検出方法を用いた指示操作用の入力デバイスを提供する。
【解決手段】光源Lと、手先Hに対して光源Lと同じ側に配置された光学的撮像手段(カメラC)と、制御手段と、上記カメラCで得られた二次元画像から、拳の形状の分布重心の座標Gと指の先端の座標Tとを算出する形状認識手段と、上記拳の重心座標Gと指先座標Tの間の距離(d)を比較する動き判定手段と、を備えている。これにより、上記拳の重心座標Gと指先座標Tの間の距離(d)が、計測前後で縮小または拡大した場合に、その際の手先Hの動きを、上記カメラCの仮想撮影平面Pに対する指の上下動(Z方向の動き)として判断することができる。
(もっと読む)
顔向き検出装置
【課題】検出精度の向上及び演算負荷の低減の少なくとも一方につながる新たな顔向き検出装置を提供する。
【解決手段】顔向き検出装置12は、特徴部抽出手段24により抽出された複数の特徴部の中から人物100の鼻孔124を抽出する鼻孔抽出手段24を有する。鼻孔抽出手段24は、複数の特徴部のうち最も移動量の大きい特徴部を鼻孔124として抽出する。
(もっと読む)
画像認識装置、画像認識方法および画像認識プログラム
【課題】物体の認識を精度良く行うことができる画像認識装置を提供する。
【解決手段】画像認識装置1は、画像に対して3D解析手法による物体認識を行う3D解析手法による物体認識部13と、前記画像に対してパターン認識による物体認識を行うパターン認識による物体認識部14と、を備え、前記3D解析手法による物体認識部13により得られる3D解析手法による物体認識の結果と前記パターン認識による物体認識部14により得られるパターン認識による物体認識の結果に基づいて最終ターゲットの認識結果を得る、ことを特徴とする。
(もっと読む)
入力方法
【課題】
ユーザにとって使い勝手のよい入力装置を提供する。
【解決手段】
本発明に係る入力装置は、所定の動き画像信号が入力される入力部と、前記入力部に入
力された動き画像信号から動き検出を行う動き検出部と、前記動き検出部により検出され
た動きが所定の動きであった場合に所定の映像信号を出力する映像信号処理部と、制御部
とを備え、前記制御部は、前記映像信号処理部により前記所定の映像信号が出力されてい
る場合には、前記動き検出部は動き検出を行わないように前記動き検出部を制御すること
を特徴とする。
(もっと読む)
追跡装置、追跡方法およびプログラム
【課題】対象物が動くことにより画像にぶれが生じた場合でも、安定して対象物を追跡することが可能な追跡装置、追跡方法およびプログラムを提供する。
【解決手段】実施形態の追跡装置は、取得部と第1算出部と第2算出部と設定部とを含む。取得部は、追跡対象物を撮像して、時系列のフレーム単位で画像を取得する。第1算出部は、画像内の探索領域に含まれる各画素について、当該画素の画素値と基準値との一致度を示す第1尤度を算出する。第2算出部は、探索領域内の各画素について、当該画素の画素値と、過去のフレームにおける画像内の当該画素に対応する位置の画素値との差分を示す差分値を算出する。第1設定部は、探索領域内の各画素について、当該画素と、過去における追跡対象物の位置との距離が大きいほど、第1尤度の重みが小さくなるとともに差分値の重みが大きくなるように、第1尤度および差分値の各々の重みを設定する。
(もっと読む)
画像編集装置およびプログラム
【課題】移動する物体を撮影した一連の高速連写画像/動画から適切に画像を抽出して、移動物体の解析に効果的な学習教材を生成することが可能な画像編集装置を提供する。
【解決手段】移動物体を高速連写撮影(撮影間隔T)した各画像P1〜P15の合成画像CGが生成され、該合成画像CG上での各移動物体KB1〜KB15の位置(xy座標)が検出されると共に、これに基づき同移動物体KB1〜KB15の移動の軌跡が検出される。すると移動物体KB1〜KB15の移動の軌跡の特徴点Qmaxに対応するところの画像P8が特定され、この特定画像P8を含めて前記高速連写の撮影間隔Tよりも長いユーザ設定された撮影間隔Δtに対応するところの各画像P2,5,8,11,14が前記高速連写の各画像P1〜P15の中から抽出され連写抽出画像ファイルとして前記設定撮影間隔Δtと対応付けて画像&座標範囲ファイル記憶部に教材データとして記憶される。
(もっと読む)
コーナー検出装置
【課題】 撮像状況によって分離して抽出された2つのエッジ間に存在するコーナーを検出できるコーナー検出装置を提供する。
【解決手段】 車両に搭載し、周囲環境を画像として撮像するカメラ1と、撮像された画像に対し、2方向以上の直線エッジ成分を抽出するエッジ抽出部3と、各エッジを構成する画素に対して、エッジの直交方向の速度であるフローを算出するフロー算出部4と、エッジ端をエッジ方向(エッジの延びる方向)に延長するエッジ延長部5と、延長されたエッジに基づき、方向の異なるエッジ同士の交点をコーナーとして判別するコーナー判別部6と、を備え、エッジ延長部5は、延長した先に同じ大きさを有するフローが存在する場合、延長を有効と見なして再線化する。
(もっと読む)
エゴモーション概算システムおよび方法
【課題】エゴモーション概算システムおよび方法の提供。
【解決手段】エゴモーション概算システムを利用してエゴモーションパラメータを決定するためのコンピュータ実施方法であって、第1の画像フレームおよび第2の画像フレームを取得することと、第1の画像フレームの第1の部分を選択して第1のサブ画像を取得し、かつ第2の画像フレームの第2の部分を選択して第2のサブ画像を取得することと、第1のサブ画像および第2のサブ画像に変換を実行して、それぞれ、第1の透視画像および第2の透視画像を取得することと、第2の透視画像を反復的に調整して複数の調整した透視画像を取得することと、第1の透視画像と複数の調整した透視画像との個々の差異それぞれに対応する複数の差分値を決定することと、複数の差分値のうちの1つに対応する、エゴモーションパラメータに関する並進ベクトルを決定することと、を含む、方法。
(もっと読む)
画像認識装置、画像認識方法及びプログラム
【課題】検出率を落とすことなく、被写体の周辺に発生する誤検出を低減できるようにする。
【解決手段】入力画像の尤度に基づいて前記入力画像が認識対象であることを判別する画像判別手段と、前記画像判別手段により判別された入力画像から、重複関係にある領域を抽出する抽出手段と、前記重複領域の重複状態を分類する分類手段と、前記尤度と前記重複状態とに基づいて前記重複領域が認識対象であることを判別する判別手段と、を備えた画像認識装置である。
(もっと読む)
画像処理装置、画像処理方法、画像形成装置、画像処理プログラム
【課題】帳票画像を読み取って罫線を認識する画像処理において、様々な形状を持つ罫線の角部を認識することができる。
【解決手段】幅と長さを有する罫線と、二つの罫線の角部領域に形成される角部罫線領域を有する画像を読み取る画像処理装置において、前記画像から、前記角部罫線領域を抽出する角部罫線領域抽出手段と、前記角部罫線領域の画像から、前記角部罫線領域の画像の特徴量を抽出する特徴量抽出手段と、前記角部罫線領域の複数の角部のパターンに対応した特徴量を保持する特徴量辞書と、前記特徴量抽出手段により抽出された特徴量と、前記特徴量辞書に保持されている前記角部のパターンの特徴量とを比較して一致度を算出し、所定の一致度を有する前記角部のパターンを前記角部罫線として抽出する角部罫線抽出手段と、を有する。
(もっと読む)
画像処理プログラム、画像処理方法および画像処理装置
【課題】各画像の座標を対応付ける場合の計算量を削減すること。
【解決手段】画像処理装置100は、学習対象画像データ130aおよびカメラ視点の異なる視点変動画像データ群130bから特徴点を抽出し、各特徴点を分類して、登録テーブル130cを生成する。画像処理装置100は、登録テーブル130cの各特徴点群の重心座標と、認識対象画像データ130dから抽出した特徴点の座標とを比較して、学習対象画像データ130aの特徴点と認識対象画像データ130dの特徴点とを対応付ける。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
監視装置、その方法、及び、そのプログラム
【課題】監視対象物が移動しても確実に追従できる監視装置を提供する。
【解決手段】監視対象物を指し示す指示部22と、前記監視対象物を撮像して時系列の画像を取得するカメラ12と、前記時系列の画像から複数の特徴点を抽出すると共に、前記各特徴点の移動量を算出し、予め設定された基準移動量より前記移動量が大きな特徴点の第1の集合の移動先位置Bを予測する予測部14と、前記時系列の画像間の差分に基づいて変化領域を抽出し、前記変化領域の重心位置Oを検出する検出部16と、前記平均移動量が第1の閾値と比較して大きい場合には前記移動先位置Bを指示位置と設定し、小さい場合には前記重心位置Oを指示位置と設定する判定部18と、前記指示部が前記指示位置を指し示すように前記指示部を制御する制御部20とを有する。
(もっと読む)
41 - 60 / 1,697
[ Back to top ]