
Fターム[5L096FA67]の内容
Fターム[5L096FA67]に分類される特許
141 - 160 / 1,697
画像処理装置およびこれを備えた原稿読取システム
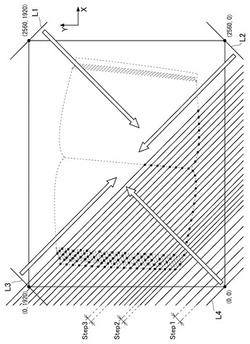
【課題】原稿の外形輪郭を簡単に且つ精度よく検出することができるようにする。
【解決手段】矩形をなす撮影画像の互いに直交する2辺に沿った座標軸に対して所定角度傾斜した仮想直線L1〜L4を、撮影画像の4つの頂点を始点としてその始点から撮影画像の中心に向かって、所定の移動間隔で平行移動させながら、その仮想直線と輪郭成分との交点を取得し、ここで取得した交点に基づいて原稿の外形輪郭の角点を取得して、その角点に基づいてメッシュモデルを生成するものとする。
(もっと読む)
画像処理装置、画像処理方法及びプログラム

【課題】、一連の動作を撮像した複数の画像から適切な状態となる画像を自動的に特定すること。
【解決手段】画像取得部51は、被写体の動きが連続的に撮像された複数の画像のデータを取得する。差分画像生成部54は、複数の画像のデータから、隣接した画像間の差分画像のデータを夫々生成する。強調画像生成部55は、差分画像のデータから、演算処理のための画像のデータを生成する。ハフ変換部562は、強調画像生成部55により生成された画像のデータを処理対象として演算処理(ハフ変換処理)を実行する。角度決定部151は、ハフ変換部562による演算結果に基づいて、被写体の動きの軌跡から変化点を特定する。
(もっと読む)
路面状態検出装置、路面状態検出方法、及び路面状態検出プログラム
【課題】正しく路面の勾配を検出することができる路面状態検出装置、路面状態検出方法、及び路面状態検出プログラムを提供する。
【解決手段】画像取得部は画像を取得し、区分線認識部は前記取得した画像から路面に表された1つの車線の左側を区分する区分線と当該車線の右側を区分する区分線を抽出し、路面状態判定部は前記左側を区分する区分線の方向と前記右側を区分する区分線の方向に基づき、前記路面の勾配の変化を表す勾配情報を判定する。
(もっと読む)
階層型構成要素ベースの物体認識
【課題】相互に相手を基準に移動可能な任意数の部分からなる可能性のある、イメージ中の物体を認識するための方法を提供する。
【解決手段】オフライン段階では、本発明は一連の例示イメージから単一の物体の部分の相対的な動きを自動的に学習し、単一の物体の部分の記述、部分間の関係、および効率的な検索戦略を組み込んだ、階層型モデルを構築する。これは、例示イメージ中の単一の物体の部分のポーズ変化を解析することによって実行される。ポーズは、物体認識に関する任意の類似性尺度によって取得できる。オンライン段階では、本発明は、階層型モデルを使用して検索イメージ中の物体全体を効率的に見つける。オンライン段階中には、物体の有効なインスタンスのみが見つけられ、すなわち、物体の部分は全体イメージ中ではなく、効率的な検索を容易にしてその後の妥当性検査ステップを不要にする階層型モデル内の物体部分間の関係によって定義される、パラメータスペースの制限された部分でのみ検索される。
(もっと読む)
視線計測システム、方法およびプログラム
【構成】 サーバ12は、ステップS105で、顔の特徴点の位置データを取得し、ステップS107で顔の姿勢および位置のデータを取得する。ステップS111において、特徴点の位置データおよび顔の位置および姿勢データに基づいてフレーム画像毎に個人パラメータおよびフレームパラメータを設定し、ステップS115で、個人パラメータおよびフレームパラメータの各フレーム顔画像に対する適合度を示すスコア値を計算し、全フレーム画像についてそのスコア値を積算する。積算スコア値が所定の閾値を下回るまで、ステップS121で各パラメータを修正する。修正された個人パラメータおよびフレームパラメータに基づいて、眼球中心と虹彩中心を結ぶ3次元直線として視線方向を計測する(S123)。
【効果】 全フレームの顔画像と照合して個人的パラメータおよびフレームパラメータを修正するので、視線の推定または計測の精度を向上させることができる。
(もっと読む)
ステレオ画像較正方法、ステレオ画像較正装置及びステレオ画像較正用コンピュータプログラム
【課題】各カメラによる画像に写っている像全体の位置をステレオ画像として適切となるように修正するための較正パラメータを算出するステレオ画像較正方法を提供する。
【解決手段】ステレオ画像較正方法は、第1及び第2のカメラから被写体を含む領域を撮影した第1及び第2の画像を取得し、第1及び第2の画像からそれぞれ被写体領域を検出し、各画像の被写体領域から被写体上の同一の点に対応する被写体特徴点の組を抽出し、被写体特徴点の組に基づいて、像面に対して平行な第1の軸及び第2の軸のそれぞれの周りの第1のカメラの回転角と第2のカメラの回転角の差による各画像上の被写体の位置のずれを補正する第1の較正パラメータを求め、第1の画像及び第2の画像の背景領域に写っている物体の像から各カメラの光軸周りの回転角の差による第1の画像と第2の画像間の回転を補正する第2の較正パラメータを求めることを含む。
(もっと読む)
線幅測定装置、画像処理装置、画像処理システム及びプログラム
【課題】線幅見本を画像読取部で読み取ることによる線幅測定の結果の安定性を向上する。
【解決手段】画像読取部での読取画像を受け付ける読取画像受付部25において、白黒2値画像取得部81が、線幅測定用チャートの読取画像である白黒2値画像を取得し、領域決定部82が、白黒2値画像上で線幅測定に用いる線幅測定領域を決定し、角度検出部83が、線の読取角度を検出し、角度比較部85が、この読取角度と線を読み込む角度として指定された指定角度との差分が閾値以下かどうか判定し、閾値以下でなければ、警告出力部86が、線幅測定用チャートの再読み込みを画像読取部に指示し、閾値以下であれば、画素カウント部87が、線を構成する画素のうち線幅測定領域内の画素数をカウントし、線幅決定部88が、カウントされた画素数、線幅測定領域の線描画方向の長さに相当する画素数等に基づいて、線幅を決定する。
(もっと読む)
認識装置、方法及びプログラム
【課題】認識精度と認識効率を両立する。
【解決手段】実施形態の認識装置は、生成部、抽出部、変換部、計算部、出力制御部、登録部を備える。生成部は、学習サンプル記憶部から学習サンプルを1以上含むグループを複数選択する選択処理を複数回行い、選択した複数のグループ毎に識別基準を学習し、複数の識別基準を含む評価基準を生成する生成処理を行う。抽出部は、物体を含む画像の第1特徴量を抽出する。変換部は、評価基準を用いて第1特徴量を第2特徴量に変換する。計算部は、第2特徴量と基準特徴量を用いて認識テーブル内のカテゴリに対する物体の類似度を計算する。出力制御部は、認識結果を出力部に出力させる。登録部は、第2特徴量を基準特徴量として物体のカテゴリに対応付けて認識テーブルに登録し、第1特徴量を物体のカテゴリに属する学習サンプルとして学習サンプル記憶部に登録する。生成部は、所定の条件が成立すると生成処理を再度行う。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
飛び出し歩行者判定装置及びプログラム
【課題】自車両の進路に飛び出す危険性が高い歩行者が存在するか否かを精度良く判定するようにする。
【解決手段】エッジ抽出部22によって、複数の撮像画像の各々からエッジを抽出し、輪郭線生成部24によって、各撮像画像について、エッジのピーク点が画像上方へ向かって連続する歩行者候補の輪郭線を生成する。対応輪郭線検索部28によって、各撮像画像において対応する輪郭線を検索し、移動量推定部30によって、対応する輪郭線のペアの各々について水平方向の移動量を算出する。グルーピング部32によって移動量に基づいて、輪郭線を、複数の輪郭線群に分類する。グループサイズ算出部34によって、各輪郭線群について、高さ方向の大きさを算出する。飛び出し判定部36によって、各輪郭線群についての移動量と高さ方向の大きさとに基づいて、自車両の進路に飛び出す危険性が高い歩行者が存在するか否かを判定する。
(もっと読む)
画像の正置からの回転角度検知装置および方法
【課題】
画像の正置位置からの回転角度を求める。できれば高速に、精度良く求めたい。
【解決手段】
画像の正置位置からの回転角度を求める。入力画像の横方向に0を詰めて拡張し、縦方向に1/8縮小した前処理画像について、各方向の線の程度を示す評価値を計算する。例えば、前処理画像の横方向に対する角度を少しづつ変えながら求めた評価値の変化から画像の回転角度を求めるために、各方向について平行線を引いてプロジェクションを取り、2乗和してその方向の評価値とする。評価値の最も高い方向が求める正置位置からの回転方向となる。各方向のプロジェクションは、各方向に引かれた平行線と横軸の座標線の交点を参照する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】種々の形状のマークの識別を可能とする。
【解決手段】電子部品Cを基板Kに実装する際に、電子部品又は基板に付されたマークMを撮像した撮像画像データによるマークの識別に用いられる画像処理方法であって、マークの撮像画像データから当該マークの中心位置を特定する中心特定工程と、マークの中心位置からマークの撮像画像データの極座標変換データを取得するデータ変換工程と、極座標変換データにおける背景とマークとの境界線の形状的特徴からマークの形状を判別する形状判別工程と備えている。
(もっと読む)
位置特定装置および動作指示装置並びに自走式ロボット
【課題】被搬送物等の指示対象物または搬送先等の指示対象位置の位置を特定する際の精度を向上させることができる位置特定装置および動作指示装置並びに自走式ロボットを提供することを目的とする。
【解決手段】ユーザの操作によって、作業空間における指示対象物に投影されたパターンを取得する画像取得部51と、該画像取得部51により取得された前記パターンから前記指示対象物の位置情報である座標を抽出する位置情報抽出部124とを備え、特定された前記指示対象物の位置情報に基づいた前記指示対象物に対する動作指示に基づいて、前記指示対象物に対する動作を実行する、前記作業空間を自律的に移動する自走式ロボットに用いられる位置特定装置101を採用する。
(もっと読む)
物体識別装置
【課題】 パン同士が部分的に互いに接触していても、画像認識により各物体の種類を識別するにあたり、物体毎の領域に自動的に分離処理し得る物体識別装置を提供する。
【解決手段】 2以上のパンが接触した状態のカラー画像を二値化処理して2以上のパンの二値化画像を切り出し、抽出した輪郭線を多角形近似により近似多角形の各頂点P1〜P33の座標を得る。各頂点(P12)について前後の頂点(P11−9,P13−14)との位置関係に基づき屈曲状況を表すくびれベクトル(KH)を求める。一対の境界点候補を結ぶ境界線候補の長さL、境界線候補と各くびれベクトルとのなす角度θ、境界線候補を直径とする円形領域(E12−27)が全体画像領域と重複する領域占有率、くびれベクトルの深さDに基づいて境界線を確定する。境界線で領域分けして分離する。
(もっと読む)
行動認識装置、行動認識方法及びプログラム
【課題】実験動物の各部位の行動をより詳細に定量化する。
【解決手段】輪郭情報取得部10は、撮像部で撮像されるマウスの撮像画像に基づいて、その撮像画像におけるマウスの重心位置を基準として極座標変換されたマウスの輪郭情報を逐次取得する。変動情報算出部11は、輪郭情報取得部10により逐次取得されたマウスの輪郭情報を、例えば、頭部、尾部、右胴体部、左胴体部等の部位単位で分割し、分割された部位毎にマウスの輪郭情報の変動に関する情報を算出する。行動判別部12は、変動情報算出部11によって算出された各部位の輪郭情報の変動に関する情報に基づいて、マウスの行動を判別する。
(もっと読む)
ロボット装置、位置姿勢検出装置、位置姿勢検出プログラム、および位置姿勢検出方法
【課題】平面画像により表現された対象物体の、立体空間における位置および姿勢を高精度に検出する。
【解決手段】対象物体を撮像して画像データを生成する撮像装置11と、撮像装置11を可動に支持するロボット本体12と、リファレンスに対する撮像装置11からの視線方向ごとに、視線方向に対する面のテンプレート画像データとロボット座標系における面の位置および姿勢を表す情報とロボット座標系における撮像装置11の位置および姿勢を表す情報とを有するテンプレート情報を記憶するテンプレート情報記憶部と、撮像装置11が生成した画像データに含まれる対象物体の画像から可視である面を検出し、テンプレート情報記憶部から、可視である面に対応するテンプレート情報を読み込み、テンプレート情報に基づいてロボット座標系における対象物体の位置および姿勢を表す位置姿勢データを生成する位置姿勢データ生成部とを備えた。
(もっと読む)
顔検出方法
【課題】被写体の顔のサイズ、顔の向き、及び天地方向等の顔検出を行う条件に応じて顔検出の処理速度を高速化する。
【解決手段】サイズ選別部64において、顔が存在すると予想される画像サイズに対して、当該画像サイズに近傍の画像サイズを、次の顔検出に用いる画像サイズの段階として定めることによって、顔検出に用いる画像サイズを選別する。2回目以降の顔検出処理では、比較部62において、サイズ選別部64で設定された画像サイズの画像データに対して顔検出を行う。
(もっと読む)
画像照合装置または画像照合方法
【課題】 二つの画像がSAR画像と光学画像とで異種である場合に、特徴点やエッジが明確に検出できない場合であっても画像の照合をおこなうことを目的とする。
【解決手段】 本発明によれば、異種画像と光学画像について各々フーリエ変換を行う周波数成分検出手段105a、105bと、異種画像と光学画像の各々の区間の画素列を周波数変換後の周波数成分を照合することによって異種画像と光学画像との位置あわせをおこなう位相照合手段106を備えた。
(もっと読む)
姿勢推定装置、姿勢推定システム、および姿勢推定方法
【課題】関節を有する物体の姿勢を高精度に推定することができる姿勢推定装置を提供すること。
【解決手段】姿勢推定装置100は、関節により接続された複数の部位を有する物体を撮影した画像データに基づいて物体の姿勢の推定を行う装置であって、姿勢毎に、部位の位置を規定する基準モデルを格納する基準モデル格納部140と、姿勢毎に、密集部分の重みが小さくなるように部位に対して重み付けを行う重み付け算出部150と、重み付けを適用して基準モデルと物体とを比較することにより、物体の姿勢を推定する姿勢推定部160とを有する。
(もっと読む)
路面上パターン認識方法および車両用情報記録装置
【課題】単純な処理により認識を可能にすると共に、誤認識の発生を抑制する。
【解決手段】画像フレームのグレースケールデータを入力し(S11)、第1の画像フレームの中に第1の処理対象範囲を割り当て(S13)、前記第1の処理対象範囲の画像データを所定の方向に走査して特定の線状パターンを表す複数のパターンエッジの組み合わせを検出し(S14)、前記線状パターンが1回検出された後で大きさが小さい第2の処理対象範囲を、検出された前記線状パターンの位置を基準にして決定し(S16)、第2の画像フレームの中で、前記第2の処理対象範囲の画像データを所定の方向に走査して前記線状パターンを検出し(S18)、前記線状パターンを複数回連続的に検出した場合に、該当する線状パターンを有効なパターンとして認識する(S21)。
(もっと読む)
141 - 160 / 1,697
[ Back to top ]